| Issue |
JNWPU
Volume 43, Number 6, December 2025
|
|
|---|---|---|
| Page(s) | 1183 - 1191 | |
| DOI | https://doi.org/10.1051/jnwpu/20254361183 | |
| Published online | 02 February 2026 | |
Modeling and simulation of current control for permanent magnet synchronous motors based on multilayer perceptron neural networks
基于多层感知机神经网络永磁同步电机模型预测电流控制建模仿真
School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China
Received:
13
January
2025
Abstract
In the traditional finite control set model predictive current control(FCS-MPCC) for a permanent magnetic synchronous motor (PMSM), periodic delay caused by computational latency and hardware register update mechanisms leads to control commands lagging behind actual motor states, thereby impairing dynamic response and control stability of the PMSM. To address the issue, this paper introduces a two-step finite control set model predictive current control(FCS-MPCC) method. By predicting two-step current states simultaneously and generating control commands for the current time step in the previous cycle, the introduced method effectively reduces the impact of control delay and improves prediction accuracy. However, while the two-step FCS-MPCC method enhances control performance, the more complex computational logic increases the computational burden, limiting its real-time applicability. To overcome the limitation, the paper proposes a method based on the multilayer perceptron(MLP) neural network, which replaces traditional model predictive control strategies with a data-driven method. By learning the optimization rules of the two-step FCS-MPCC, the MLP neural network can replicate its control performance without requiring online computational efforts. The simulation results demonstrate that the proposed method exhibits strong robustness under secondary load disturbances, further validating its potentials for application in motor control.
摘要
永磁同步电机(PMSM)的传统有限控制集模型预测电流控制(FCS-MPCC)方法中, 由于计算延时和硬件寄存器更新机制引入的周期性延迟, 控制指令滞后于实际电机状态, 削弱了动态响应和控制稳定性。为解决这一问题, 引入两步有限集模型预测电流控制(T-FCS-MPCC), 通过同时预测两步电流状态, 在上一周期生成当前时刻的控制指令, 从而有效降低控制延时的影响, 并提升预测精度。然而, T-FCS-MPCC虽然改善了控制性能, 但更复杂的计算逻辑增加了计算负担, 降低了其实时性。为此, 提出基于多层感知机(MLP)神经网络的方法, 以数据驱动方式代替传统模型预测控制策略。MLP神经网络通过学习T-FCS-MPCC的优化规则, 能够较好地复现其控制性能, 且不需要在线控制计算。仿真研究表明, 该方法在二次负载干扰下表现出良好的鲁棒性, 进一步验证了其在电机控制中的应用潜力。
Key words: permanent magnetic synchronous motor / two-step finite control set model predictive current control / multilayer perceptron neural network / modeling and simulation
关键字 : PMSM / FCS-MPCC / T-FCS-MPCC / 多层感知机神经网络控制 / 建模仿真
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
永磁同步电机(PMSM)因其高效率、高功率密度以及优异的动态性能, 广泛应用于电动车辆、机器人、工业控制等领域[1–3]。为了满足现代工业对高精度、高响应速度的要求, 一些现代控制方法被提出并应用于电机驱动系统, 以达到令人满意的性能。滑模控制因其优异的抗扰性能广泛应用于PMSM控制, 但传统方法的抖振问题限制了其实用性,可以通过改进的自适应趋近律和扩展状态观测器, 有效抑制抖振, 提升动态性能和鲁棒性[4–5]。鲁棒控制因其处理参数不确定性和外部扰动的能力而备受关注, 但设计通常依赖保守假设, 可能导致性能下降。改进方法如:两自由度鲁棒控制器结合电机非线性特性, 实现全局指数稳定性;自适应鲁棒控制器则通过电流约束变换和参数自适应估计, 显著提升了高功率PMSM系统的抗扰性能和适用性[6–7]。自适应模糊控制结合模糊逻辑系统和全状态约束技术, 能逼近未知非线性函数并确保系统信号有界, 适应复杂应用场景[8–9]。这些方法从不同方面提高了电机的控制性能。
在众多控制策略中, 模型预测控制(MPC)因其优化控制能力和灵活的约束处理特点而备受关注[10]。MPC主要分为2类: 连续控制集模型预测电流控制(CCS-MPC)和有限控制集模型预测电流控制(FCS-MPC)[11–12]。与CCS-MPC方法需要使用脉宽调制器不同, FCS-MPC只需考虑有限数量的逆变器开关状态, 并通过成本最小化函数选择最佳开关状态直接输出驱动电源转换器, 使用起来更为方便[13]。在PMSM驱动系统中, FCS-MPC根据不同的控制目标, 主要可分为3种类型: 模型预测电流控制(FCS-MPCC)、模型预测转矩控制(FCS-MPTC)以及模型预测速度控制(FCS-MPSC)[14–16]。其中FCS-MPCC因其控制结构简洁且代价函数中无需权重系数, 而被广泛应用[17]。
本文的研究是以FCS-MPCC为基础,由于FCS-MPCC方法需要在每个控制周期内遍历所有的电压矢量进行优化计算,这种计算量较大且耗时较长,可能会降低PMSM系统的性能,从而降低最佳控制的效果。同时控制系统存在硬件寄存器更新机制的周期性延迟问题,控制指令往往滞后于电机的实际状态,从而削弱了系统的动态响应性能和控制稳定性。
为了解决FCS-MPCC方法在动态响应性能和控制稳定性方面的挑战, 在此提出了一种改进的两步有限控制集模型预测电流控制(T-FCS-MPCC)方法。该方法通过同时预测两步电流状态, 在上一控制周期生成当前时刻的控制指令, 有效降低了控制延时的影响, 并提升了预测精度。然而, T-FCS-MPCC方法复杂的计算逻辑进一步加剧了计算负担。
为了减轻控制的计算量, 进一步引入了基于多层感知机(MLP)神经网络的控制方法。MLP具有强大的非线性映射能力和并行计算优势, 可以逼近复杂的输入输出关系, 从而替代传统的T-FCS-MPCC方法, 显著降低模型预测控制算法在线计算的复杂度, 提高了控制系统的实时性。通过算法仿真, 验证了所提出方法在动态响应、稳态性能和鲁棒性方面的优势, 为PMSM的高效控制提供了一种新的解决方案。
本文的结构安排如下: 第一部分介绍有限集模型预测电流控制的数学模型及仿真; 第二部分详细描述MLP神经网络模型的训练和仿真以及在DSP芯片的预部署工作; 第三部分对研究工作进行总结并展望未来发展方向。
1 有限集模型预测电流控制
1.1 同步坐标系上PMSM数学模型
以表贴式PMSM为具体对象, 假设定子三相绕组对称并以星形连接, 气隙磁场呈均匀正弦分布, 磁路线性, 忽略铁心损耗, 转子无阻尼绕组。在此假设下, PMSM的电压方程可在同步坐标系下表示为:
 (1)
(1)
式中:ud和uq为d-q轴电压; id和iq为d-q轴电流; Ld和Lq为d-q轴电感, 因为表贴式PMSM气隙较大且永磁体磁导率接近空气, 所以平行和垂直于磁场方向的磁路对称, 定子直轴和交轴电感近似相等;ω为电角速度;R为定子电阻;ψf为永磁体在d轴产生的磁链。
1.2 单步有限集模型预测电流控制
1.2.1 预测模型
基于d-q轴电压方程, 预测模型可以通过前向差分公式得到:
 (2)
(2)
式中:  和
和 为下一时刻的d-q轴电流预测值;
为下一时刻的d-q轴电流预测值;  和
和 为当前时刻的d-q轴电流;
为当前时刻的d-q轴电流;  和
和 为控制输入电压; Ts为采样时间。
为控制输入电压; Ts为采样时间。
1.2.2 代价函数及寻优
FCS-MPCC是通过代价函数对多种可能的控制动作进行评估, 并选择最优动作以最小化跟踪误差。代价函数通常包括多个目标项, 以确保系统在满足不同控制需求和物理约束的同时, 达到优化状态。代价函数可表示为
 (3)
(3)
式中:  和
和 是d轴和q轴电流的参考值;
是d轴和q轴电流的参考值;  和
和 是预测模型下一时刻的电流; α和β是对应的权重系数, 用于调整d轴和q轴电流跟踪的相对优先级。J限幅是限幅代价项, 用于表示物理限制条件。限幅形式可分为硬限幅和软限幅。
是预测模型下一时刻的电流; α和β是对应的权重系数, 用于调整d轴和q轴电流跟踪的相对优先级。J限幅是限幅代价项, 用于表示物理限制条件。限幅形式可分为硬限幅和软限幅。
硬限幅: 当电流或电压超出预设范围时, 赋予超限动作极高的代价(通常为无穷大), 确保控制动作不会选择超限状态。
软限幅: 当电流或电压超限时, 给予一定的惩罚代价, 但不完全排除该控制动作, 适用于灵活调整的场合。限幅代价项表示为
 (4)
(4)
式中, G为限幅代价的权重系数。当电流未超出限制范围时, 限幅代价为零, 超限时则增大代价值, 从而避免选择带来过大电流的控制动作。
在控制动作选择与优化中, FCS-MPCC通过对控制动作的穷举搜索, 选择最优控制策略。以三相两电平逆变器为例, 其共有8种开关状态, 对应8个不同的电压矢量, 如表 1所示。
在每个控制周期内, FCS-MPCC通过以下步骤来选择最优控制动作:
计算预测模型: 在每个候选开关状态下, 利用预测模型计算下一时刻的状态量(如电流、速度等)。
评估代价函数: 计算每种开关状态下的代价函数J(u), 综合考虑电流跟踪误差和限幅条件。
选择最优控制动作: 选择代价函数最小的开关状态作为当前时刻的最优控制动作。
FCS-MPCC可以有效地选择最优控制动作, 确保系统在约束条件下高效运行。忽略限幅项, 简化后的代价函数为
 (5)
(5)
这种简化处理适用于对硬件限制要求不严格的场合, 既减少了代价函数的计算量, 又在一定程度上保证了控制的有效性。
图 1给出了FCS-MPCC仿真原理图, 这种传统的电流预测控制在k时刻计算出基于当前电机状态的最优电压矢量, 但因计算延时, 控制指令的执行将滞后于实际状态。这种延时削弱了动态响应和控制稳定性。在实际电机控制中, 工作寄存器用于输出控制信号, 而影子寄存器作为缓冲, 在不干扰当前PWM输出的情况下更新参数, 这进一步加剧了控制滞后。
电压矢量
 |
图1 FCS-MPCC仿真原理图 |
1.3 两步有限集模型预测电流控制
为了解决硬件延迟的影响, 引入两步有限集模型预测电流控制(T-FCS-MPCC)。在每个控制周期内同时预测两步电流状态, 输出下一周期的最优电压矢量。当前时刻的控制指令在上一周期已生成, 有效消除了单步预测的延时问题。相比之下, 两步预测还使得控制信号能够更早地调整, 提升了对电机状态的预测精度, 从而改善动态性能和控制稳定性。其预测模型可表示为
 (6)
(6)
两步模型预测的代价函数表示为
 (7)
(7)
由于零电压矢量V0和V7对T-FCS-MPCC的控制效果相同, 并且代价函数的计算结果也相等, 两者的选择取决于遍历顺序, 所以按照(5)式和(7)式设计的代价函数, 控制结果只会出现7种开关状态。这样会导致冗余开关状态未被充分利用, 开关频率分布不均, 增加功率器件的开关损耗和缩短功率器件的寿命。为了改善这一状况, 在代价函数中加入开关变换次数的惩罚项, 提升系统的稳定性和整体性能。
 (8)
(8)
式中: fsw为预测开关状态与当前开关状态之间需要转换的开关次数; α为权重系数0.002 5。
两步模型预测在Matlab中s-function流程图见图 2。调用模型实现电机控制的原理图见图 3, 该控制还需要q轴速度外环比例积分的配合。
仿真系统中电机主要的参数配置如表 2所示。
仿真在速度外环设计了一个阶跃变化的转速参考信号, 其范围由20 r/min突变至30 r/min。仿真结果如图 4所示, 电机转速能够快速且平稳地跟踪参考信号的变化, 转速曲线能快速达到稳态。
为了进一步评估系统的抗干扰能力, 仿真中引入了20%的负载扰动。扰动在多个随机时刻施加, 使电机负载在20~22 N·m范围内波动。仿真结果如图 5所示, 当负载扰动发生时, 转速出现19%的轻微波动, 系统在0.08 s时间内恢复稳态。这表明, T-FCS-MPCC算法在抑制扰动方面表现出较强的鲁棒性和稳定性。
通过仿真实验, 验证了T-FCS-MPCC算法在PMSM控制中的有效性和适用性。为后续神经网络的学习奠定了理论与实践基础。
 |
图2 s-function代码流程图 |
 |
图3 T-FCS-MPCC原理图 |
电机主要参数
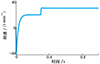 |
图4 电机转速 |
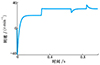 |
图5 负载扰动下电机转速 |
2 基于T-FCS-MPCC控制的多层感知机神经网络学习
FCS-MPCC由于需要在每个控制周期内遍历所有8个电压矢量, 计算量较大且耗时较长, 限制了其在高性能电机控制中的应用。尽管改进的T-FCS-MPCC算法优化了控制性能, 但更复杂的计算逻辑进一步加剧了计算负担。为此引入多层感知机(MLP)神经网络, 通过数据驱动的方式代替传统的模型预测控制策略, 以显著降低计算复杂度。MLP网络以其强大的非线性映射能力和并行计算效率, 能够逼近复杂的输入输出关系, 同时结合多种控制策略的优势, 提升控制效果。MLP网络能够融合模型预测电流控制与传统PI控制的优点, 实现不同运行工况下的高效控制。
2.1 数据采集与预处理
首先需要采集T-FCS-MPCC算法相关数据作为网络训练样本。数据采集与预处理过程包括以下3个步骤。
1) 输入特征信号
从Simulink仿真中采集6组控制信号, 包括 , 作为神经网络的输入特征。这些信号涵盖了系统的关键信息, 是神经网络学习的基础。
, 作为神经网络的输入特征。这些信号涵盖了系统的关键信息, 是神经网络学习的基础。
2) 输出状态信号
将T-FCS-MPCC的3个输出状态信号Sa, Sb, Sc转化为分类标签, 映射为1~8的整数, 代表 8种控制状态。这些标签为神经网络提供了明确的学习目标。
3) 数据划分
将采集的数据集随机划分为训练集(90%)和测试集(10%), 以优化模型训练和评估其泛化能力。
2.2 神经网络模型设计与训练
MLP是一种经典的前馈神经网络, 常用于复杂非线性系统的建模。由于永磁同步电机是一个多变量的、强耦合的非线性系统, 使得MLP具有较强的建模优势。所设计的MLP模型用于替代传统T-FCS-MPC控制策略, 实现永磁同步电动机运行的在线实时控制。神经网络的离线训练将取代MPC繁重的计算负担, 从而提高算法的计算速度。
图 6给出了MLP神经网络的5层架构, 其数学方程可以表示为(9)式。
 (9)
(9)
式中, 分别表示输入层、归一化层、隐藏层和输出层。
分别表示输入层、归一化层、隐藏层和输出层。 是每一层的数据批归一化的结果。
是每一层的数据批归一化的结果。 是各层数据之间的权重系数矩阵,
是各层数据之间的权重系数矩阵,  表示偏置或校正因子向量。
表示偏置或校正因子向量。 是每一层的激活函数。
是每一层的激活函数。
图 7展示了MLP神经网络训练框架图。输入层Ⅰ包含6个神经元, 分别对应采样时刻的状态变量。其与T-FCS-MPCC中的输入变量相似, 但去除了d轴的参考值, 因d轴参考值始终为0, 对神经网络的影响较小。电机角度通过正弦和余弦函数转换输入, 消除了角度的周期性不连续性并保持了输入的平滑稳定。隐藏层H由3层组成, 分别包含30, 120和60个神经元。由于隐藏层的层数和神经元数量尚无精确的计算方法, 通过大量实验数据确定这些参数。输出层O包含8个神经元, 分别对应8种开关状态。
神经网络的训练数据需广泛覆盖且数据分布均匀, 以促进快速收敛。为克服不同特征尺度的影响, 输入数据引入批归一化以标准化特征分布, 提升网络在训练初期的学习效率。同时, 每个隐藏层后也应用批归一化, 减少内部协变量偏移, 稳定激活分布, 从而提高训练效率并加速收敛。批归一化的公式如(10)式所示。
 (10)
(10)
式中: K为输入层I或者隐藏层G, μ和σ2分别为K的均值和方差; ε为防止除零的小值; γ和β为缩放参数和偏移参数。
Leaky ReLU激活函数凭借计算效率高、梯度恒定以及训练收敛速度快等优点被广泛应用, 其表达如(11)式所示。
 (11)
(11)
实验表明, 虽然使用Leaky ReLU激活函数在训练过程中能够达到较高准确度, 但在仿真验证中, Leaky ReLU网络在受到连续扰动(如2次转矩干扰)时容易失稳, 难以恢复至稳定状态。相比之下, Sigmoid激活函数虽然准确度略低, 但其平滑的非线性特性使系统在扰动下具有更好的动态响应和鲁棒性, 能够有效避免失控。因此, 选择Sigmoid激活函数作为网络的激活函数, 其数学表达如(12)式所示, 将输入映射到(0, 1)区间。
 (12)
(12)
由于神经网络用于多分类任务, 输出层后引入了Softmax层, 将输出实数值转换为概率分布。Softmax函数通过指数运算和归一化处理, 确保所有输出值之和为1, 使每个输出节点的值表示对应类别的预测概率, 以便有效执行多类别分类任务, 其表达如(13)式所示。
 (13)
(13)
式中:αij表示第i个样本在第j类上的预测概率;Oji为第i个样本的输出层第j个神经元的输入;K为类别总数, 本文为8类。
优化过程通过反向传播计算损失函数相对于网络中各层参数的梯度并更新参数, 以提升模型性能。因此, 网络在Softmax层后引入分类层, 使用交叉熵损失函数来量化真实标签与Softmax输出概率分布之间的差异。其数学表达如(14)式所示。
 (14)
(14)
式中:L为一批样本的平均交叉熵损失;N为样本数量;K为类别数;yij表示第i个样本在第j类上的真实标签(one-hot编码)。
在训练中采用了Adam优化算法来调整网络参数, 初始学习率设定为0.01, 并采用分段衰减策略, 每隔10个训练轮次将学习率降低至原来的一半, 以确保训练的稳定性和收敛性。整个训练过程共进行300轮, 选择较大的批处理大小3 076以适应数据量较大的情况。为了减少样本顺序对训练的影响, 数据在每轮开始前均进行随机打乱。
模型训练的损失和准确度如图 8~9所示。验证集测试结果表明, 最终模型在测试集上的分类准确率为86%。
 |
图6 MLP神经网络结构图 |
 |
图7 MLP神经网络训练过程图 |
 |
图8 MLP的神经网络训练过程准确率 |
 |
图9 MLP的神经网络训练过程损失值 |
2.3 基于Simulink的深度神经网络仿真
在完成MLP神经网络模型训练并验证其在测试集上的性能后, 在Simulink电机模型中将传统的T-FCS-MPCC控制器替换为训练好的MLP神经网络控制器。
图 10展示了永磁同步电机在MLP神经网络控制下电机转速从20 r/min突变到30 r/min的仿真结果, 神经网络很好地学习了T-FCS-MPCC的控制效果。
图 11展示了在负载从20~22 N·m扰动下MLP神经网络效果, 在施加一次负载干扰情况下, 电机转速出现19%的轻微波动, 系统在0.08 s时间内恢复稳态, 与T-FCS-MPCC控制器保持一致, 体现了MLP具有较强的学习能力。在神经网络只学习了一个周期负载扰动数据的前提下, 在MLP神经网络控制电机仿真中反复施加负载干扰, 最后神经网络的控制策略都能够有效保持电机转速的稳定性, 表现了出较强的鲁棒性。
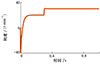 |
图10 MLP神经网络控制下电机转速阶跃变化 |
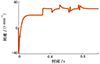 |
图11 负载干扰下MLP神经网络控制电机转速效果 |
2.4 MLP在DSP中的预部署
由于DSP未提供专门的部署通道, 因此需要将MLP神经网络转化为相应的数值计算模块。
在DSP中部署多层感知机(MLP)神经网络, 需要将训练环境中训练好的模型参数提取出来, 并手动实现推理过程。这一过程包括权重、偏置、批归一化参数以及激活函数的实现。
首先是批归一化层, 对于每一个批归一化层, 需要提取计算所需的参数: 均值μ、方差σ2、缩放参数γ和偏移参数β,用于(10)式批归一化公式计算。接着是提取所有神经元全连接的权重W和偏置b。由于Sigmiod激活函数并没有需要训练的参数, 只需要编写数学公式的代码即可。
由于预部署的是训练好的MLP神经网络,并不需要反向传播更新网路结构参数,softmax层和分类层可以舍弃。根据(9)式神经网络结构的数学方程,编写网络前向传播的代码即可。图 12展示了把MLP神经网络编程在Matlab function模块中,可以看出输入同样为电机的6个状态参数,输出直接为三相两电平逆变器的开关状态控制。根据神经网络前向传播的数学方程输出可得到逆变器开关的8个控制状态得分,只需要取得分最高的开关状态,再转换为Sa, Sb, Sc即可部署完成。
最后进行对系统进行仿真测试, 图 13展示了在负载扰动下电机运转结果, 表明该方法对神经网络进行代码部署的有效性。
为了对比T-FCS-MPCC和MLP的计算耗时, 进行了耗时对比分析, 如表 3所示, T-FCS-MPCC与所提MLP控制器在相同仿真环境下1 000 000步所需的计算时间。结果表明, MLP执行一步需5.113 μs, 而T-FCS-MPCC需7.394 μs。
 |
图12 MLP神经网络代码预部署 |
 |
图13 预部署下神经网络控制效果 |
控制时长对比
3 结论
为了解决传统有限控制集模型预测电流控制(FCS-MPCC)因计算延时和硬件寄存器延迟等问题导致的动态性能削弱和控制稳定性降低, 本文提出了两步有限集模型预测电流控制(T-FCS-MPCC)方法。通过同时预测两步电流状态, 该方法显著减小了控制指令滞后问题, 改善了系统的动态响应和稳定性。
此外, 针对T-FCS-MPCC计算复杂度较高的问题, 进一步引入了多层感知机(MLP)神经网络, 通过数据驱动方式实现了对T-FCS-MPCC的复现。仿真结果表明, MLP神经网络不仅能够有效复现T-FCS-MPCC的控制性能, 还在负载干扰条件下表现出较好的鲁棒性, 同时显著降低了计算复杂度, 为永磁同步电机控制提供了一种高效的替代方案。
References
- QUANG N K, HIEU N T, HA Q P. FPGA-based sensorless PMSM speed control using reduced-order extended Kalman filters[J]. IEEE Trans on Industrial Electronics, 2014, 61(12): 6574–6582. [Article] [Google Scholar]
- HWANG S W, CHIN J W, LIM M S. Design process and verification of SPMSM for a wearable robot considering thermal characteristics through LPTN[J]. IEEE/ASME Trans on Mechatronics, 2021, 26(2): 1033–1042. [Article] [Google Scholar]
- CHAN C C. The state of the art of electric and hybrid vehicles[J]. Proceedings of the IEEE, 2002, 90(2): 247–275. [Article] [Google Scholar]
- DANG C, DOU M, YAN S, et al. An improved adaptive sliding mode speed control of PMSM drives with an extended state observer[J]. IEEE Trans on Energy Conversion, 2024, 39(4): 2349–2361. [Article] [Google Scholar]
- TRAN H N, JEON W. Robust speed controller using dual adaptive sliding mode control(DA-SMC) method for PMSM drives[J]. IEEE Access, 2023, 11: 63261–63270. [Article] [Google Scholar]
- MENDOZA-MONDRAGÓN F, HERNÁNDEZ-GUZMÁN V M, RODRÍGUEZ-RESÉNDIZ J. Robust speed control of permanent magnet synchronous motors using two-degrees-of-freedom control[J]. IEEE Trans on Industrial Electronics, 2018, 65(8): 6099–6108. [Article] [Google Scholar]
- ZHANG J, REN W, SUN X M. Current-constrained adaptive robust control for uncertain PMSM drive systems: theory and experimentation[J]. IEEE Trans on Transportation Electrification, 2023, 9(3): 4158–4169. [Article] [Google Scholar]
- ZOU W, SHI T, GUO J, et al. A novel adaptive fuzzy control scheme for a class of nonlinear planar systems under state constraints[J]. IEEE Trans on Circuits and Systems Ⅱ: Express Briefs, 2024, 71(2): 827–831 [Google Scholar]
- ZHANG Y, WANG Q G, LIU J, et al. Command filtered fuzzy adaptive control for PMSMs with time-varying state constraints and stochastic disturbances[J]. IEEE Trans on Transportation Electrification, 2024, 10(3): 5614–5623. [Article] [Google Scholar]
- MORARI M, LEE J H. Model predictive control: past present and future[J]. Computers & Chemical Engineering, 1999, 23: 667–682 [Google Scholar]
- ZARBIL M S, SAEIDI M, VAHEDI A, et al. Continuous control set model predictive control(CCS-MPC) of a three-phase rectifier[J]. Zanco Journal of Pure and Applied Sciences, 2019, 31: 342–350 [Google Scholar]
- KOURO S, CORTES P, VARGAS R, et al. Model predictive control-a simple and powerful method to control power converters[J]. IEEE Trans on Industrial Electronics, 2009, 56(6): 1826–1838. [Article] [Google Scholar]
- GAO J, GONG C, LI W, et al. Novel compensation strategy for calculation delay of finite control set model predictive current control in PMSM[J]. IEEE Trans on Industrial Electronics, 2020, 67(7): 5816–5819. [Article] [Google Scholar]
- YARAMASU V, RIVERA M, WU B, et al. Model predictive current control of two-level four-leg inverters-part Ⅰ: concept, algorithm, and simulation analysis[J]. IEEE Trans on Power Electronics, 2013, 28(7): 3459–3468 [Google Scholar]
- GU M, YANG Y, FAN M, et al. Finite control set model predictive torque control with reduced computation burden for pmsm based on discrete space vector modulation[J]. IEEE Trans on Energy Conversion, 2023, 38(1): 703–712 [Google Scholar]
- KAWAI H, ZHANG Z, KENNEL R. Finite control set-model predictive speed control with a voltage smoother[C]//IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, 2018 [Google Scholar]
- FAVATO A, CARLET P G, TOSO F, et al. Integral model predictive current control forsynchronous motor drives[J]. IEEE Trans on Power Electronics, 2021, 36(11): 13293–13303 [Google Scholar]
All Tables
All Figures
|
图1 FCS-MPCC仿真原理图 |
| In the text | |
|
图2 s-function代码流程图 |
| In the text | |
|
图3 T-FCS-MPCC原理图 |
| In the text | |
|
图4 电机转速 |
| In the text | |
|
图5 负载扰动下电机转速 |
| In the text | |
|
图6 MLP神经网络结构图 |
| In the text | |
|
图7 MLP神经网络训练过程图 |
| In the text | |
|
图8 MLP的神经网络训练过程准确率 |
| In the text | |
|
图9 MLP的神经网络训练过程损失值 |
| In the text | |
|
图10 MLP神经网络控制下电机转速阶跃变化 |
| In the text | |
|
图11 负载干扰下MLP神经网络控制电机转速效果 |
| In the text | |
|
图12 MLP神经网络代码预部署 |
| In the text | |
|
图13 预部署下神经网络控制效果 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.