| Issue |
JNWPU
Volume 42, Number 4, August 2024
|
|
|---|---|---|
| Page(s) | 726 - 734 | |
| DOI | https://doi.org/10.1051/jnwpu/20244240726 | |
| Published online | 08 October 2024 | |
Study on intelligent anti-occlusion tracking algorithm for infrared ground targets
红外地面目标智能抗遮挡跟踪算法研究
1
Luoyang Institute of Electro-Optical Equipment, AVIC, Luoyang 471000, China
2
Unmaned System Research Institute, Northwestern Polytechnical University, Xi'an 710072, China
Received:
10
July
2023
Abstract
In response to the issue of infrared ground target tracking failure caused by background occlusion, a novel anti-occlusion tracker for infrared ground targets is proposed based on an enhanced trajectory prediction network. Initially, an occlusion assessment criterion is proposed to accurately assess the occlusion status of infrared ground targets. Subsequently, enhancements are made to the BiTrap trajectory prediction network. On one hand, velocity information is introduced through a Siamese network structure, adopting a unidirectional prediction method, building the SiamTrap trajectory prediction network that improves trajectory prediction accuracy. On the other hand, refining both the training and application methods enables more precise predictions of ground target trajectories. For short-term occlusion, the SiamTrap network uses temporal context information to predict the occluded position of the target. For long-term occlusion, a search expansion strategy is introduced to address prediction errors accumulated due to a lack of real target information. Finally, a "second verification" criterion is introduced, realizing accurate target capture and normal tracking. Comparative tests are conducted on infrared target tracking sequences with occlusion. Compared to baseline trackers, the proposed algorithm shows a 5.2% improvement in success rate and a 5.9% improvement in accuracy under the OPE evaluation metric. This indicates the robustness of the proposed algorithm in handling occlusion scenarios for infrared ground targets.
摘要
针对背景遮挡导致红外地面目标跟踪失败的问题, 提出了一种基于改进轨迹预测网络的红外地面目标抗遮挡跟踪器。提出了遮挡判断准则, 准确判断红外地面目标的遮挡情况; 改进BiTrap轨迹预测网络, 一方面通过孪生网络结构引入速度信息, 采用单向预测的方法, 提出了SiamTrap轨迹预测网络, 提高了轨迹预测的精度; 另一方面, 通过改进训练方法和应用方法, 可以更准确地预测地面目标的轨迹。对于短期遮挡, 利用SiamTrap网络基于时间上下文信息预测目标遮挡位置。对于长期遮挡, 提出了搜索扩展策略来处理真实目标信息缺乏导致的预测误差积累。提出了“二次判定”准则, 实现了目标的精确捕获和正常跟踪。在含有遮挡的红外目标跟踪序列上对算法进行了对比测试。与基准跟踪器相比, 文中所提算法在OPE评价指标下, 成功率和准确率分别提高了5.2%和5.9%。这表明文中算法在应对红外地面目标被遮挡情况下具有良好的鲁棒性。
Key words: infrared imaging / target tracking / trajectory prediction / anti-occlusion
关键字 : 红外图像 / 目标跟踪 / 轨迹预测 / 抗遮挡
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
红外成像技术依赖于对目标的红外辐射成像,直接反映目标与背景辐射强度的差异。在全天候条件下,其独特的成像技术具有可见光成像所没有的优势。红外地面目标跟踪是利用红外成像技术对车辆和其他地面目标进行跟踪。广泛应用于机器人、安全监控、城市治理等民用领域,以及无人机搜索侦察、导弹制导等军事领域。因此,对红外地面目标跟踪技术进行广泛研究十分必要。由于地面红外目标跟踪的特殊性,以及地面环境的复杂性和多样性,红外地面目标跟踪面临着目标变形、光源变化、背景杂波、尺度变化、遮挡等挑战。随着技术的进步,红外地面目标跟踪的性能不断提高。在光源和尺度变化的场景下,跟踪算法的性能得到显著提升;然而,遮挡场景中仍然存在目标跟踪失败的问题。因此,提高红外地面跟踪算法的抗遮挡性能至关重要。当红外地面目标遇到遮挡时,跟踪算法会出现以下不利影响:①遮挡目标在跟踪过程中容易引入语义或背景干扰,导致算法误判,向干扰物体漂移;②红外地面目标信息因树木、房屋等障碍物遮挡而丢失,导致算法漏检、目标丢失;③在完全遮挡的情况下,红外地面目标信息完全消失,使得处于漂移状态的算法在目标重新出现后很难再次捕获目标。
针对跟踪遮挡问题,TLD算法[1]将传统跟踪算法与传统检测算法相结合,使得跟踪过程中部分遮挡等问题得到改善。陈法领等[2]提出了一种采用时空上下文的抗遮挡跟踪算法,利用Kalman滤波对严重遮挡时的目标位置进行预测。DPCF算法[3]在全局相关滤波器的基础上,利用目标的不同分块构造可变形模型,一同进行检测跟踪,提升了部分遮挡时的跟踪鲁棒性。DeepTracking算法[4]在贝叶斯跟踪框架的基础上,通过RNN网络构建观测数据到所有目标轨迹的映射关系,并在目标被遮挡时,恢复目标的遮挡状态,但其在真实场景下的目标跟踪有效性与鲁棒性有待验证。DaSiamRPN算法[5],通过丰富训练样本的个数及种类、采用简单高效的长时跟踪策略等,提升了SiamRPN算法的抗干扰以及抗遮挡能力。Gupta等[6]通过设计不同的结构化丢失(structured dropout)方法,并将对应的互相关输出相加得到最终预测结果,对遮挡式的状态进行有效模拟,并在SiamFC和SiamRPN++上验证了有效性。Siam-GAN算法[7]使用遮挡感知模块进行遮挡判定,并在遮挡后使用基于生成对抗网络的预测模块进行后续帧的目标轨迹预测,实时性一般。ASTMT算法[8]提出了一种时空对齐匹配网络,利用视频序列中的时空信息和跟踪场景中的时空相对信息对网络参数进行修正,达到抗遮挡的作用。AODiMP-TIR[9]在目标被遮挡后利用卡尔曼滤波器对目标轨迹进行预测,并采用对齐历史帧图像的方法对目标轨迹进行修正,从而更加准确地预测遮挡目标的位置。
本文基于SuperDiMP跟踪算法,提出一种基于改进轨迹预测网络的抗遮挡智能跟踪算法:一方面在BiTrap轨迹预测网络[10]的基础上,对网络结构进行改进,提升预测网络的轨迹预测精度,同时,通过探索合理有效的训练及应用方式,使其可以用于地面红外目标的轨迹预测;另一方面,针对复杂背景环境下的目标遮挡问题,提出遮挡-预测-重捕获的抗遮挡策略,提高算法在完全遮挡以及长时遮挡情况下的跟踪精度与鲁棒性。
1 SuperDiMP跟踪算法
SuperDiMP跟踪器由分类分支和回归分支组成。回归分支用于估计目标边界框,包括参考分支和测试分支。前者利用初始帧和给定的目标信息保存目标的外观信息,后者用于提取当前帧的特征并计算IoU值,通过迭代优化获得最佳估计。该分支在初始帧创建训练集,并通过迭代优化得到具有强判别力的滤波器f。在跟踪过程中, 训练集和滤波器f不断更新, 以实现对变化目标的准确表示。并且第t帧中目标的中心位置由(1)~(2)式确定。
 (1)
(1)
 (2)
(2)
式中:Rt是分类分支的响应; gt为第t帧搜索区域中特征提取器获得的特征; *为卷积运算; (xtBB, ytBB)是目标中心位置。
SuperDiMP将目标跟踪分解为目标分类和目标估计2个独立但相关的子任务, 实现目标的准确稳定跟踪。在跟踪过程中, SuperDiMP跟踪器根据第t-1帧中目标的位置定义第t帧的搜索区域; 同时, 根据分类分支的响应R确定第t帧中的目标位置。当目标被树木、建筑物等自然和人为障碍物遮挡, 并且搜索区域内没有目标时, SuperDiMP无法根据响应R确定目标位置。此时, 搜索区域位置保持不变, 并在后续帧等待目标重新出现。这种跟踪策略简单但存在严重缺陷。①目标完全被遮挡后能否重新捕获取决于目标是否仍在搜索区域内。②目标完全被遮挡后, 很容易漂移到搜索区域内的类似干扰上, 造成跟踪失败。为了克服SuperDiMP原有跟踪策略的缺陷, 本文提出的模型在SuperDiMP的基础上引入了抗遮挡策略, 使得跟踪器能够有效处理红外地面目标跟踪过程中的遮挡问题。
2 抗遮挡策略
本文提出了一种基于SuperDiMP跟踪器的抗遮挡跟踪器, 跟踪器的结构如图 1所示。
所提出的跟踪器利用SuperDiMP跟踪器的分类分支响应准确确定完全遮挡。确定完全遮挡后, 采用SiamTrap轨迹预测网络根据目标的历史轨迹信息预测目标轨迹。此外, 对于长期遮挡问题, 利用搜索区域扩展策略来处理预测模型中的误差累积。为了保证目标重新出现后能够被准确捕获, 本文提出了“二次判定”标准, 以准确判定搜索区域中出现的“目标”, 使其能够恢复到正常跟踪状态。
 |
图1 本文提出的跟踪器算法框架 |
2.1 遮挡判定
在红外地面目标跟踪中, SuperDiMP跟踪器通过分类分支获得响应图, 并根据响应的最大值确定目标的位置。如图 2所示。
当目标处于不同状态时, 响应的最大值和波动存在明显差异。因此, 本文利用响应的最大值与平均峰相关能量(APCE)对目标的跟踪状态进行评估, 提出完全遮挡判定准则如(3)式所示。
 (3)
(3)
式中,β=0.25。
APCE的计算公式如(4)式所示
 (4)
(4)
式中:R为分类分支响应; EAPC(R)代表响应R的APCE值; Rmax, Rmin分别为响应的最大值与最小值; m, n分别为响应图的宽和高。
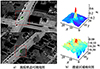 |
图2 目标正常跟踪以及完全遮挡情况下分类分支的响应图 |
2.2 抗遮挡轨迹预测网络
当目标被完全遮挡后, 搜索区域内目标的特征就完全丢失了。原始的SuperDiMP跟踪器仅采用简单的抗遮挡策略, 即当目标被遮挡时, 始终将遮挡前的目标位置作为遮挡帧的目标位置, 等待目标重新出现。该策略对于处理短期遮挡具有一定的可行性, 但面对长期遮挡, 很难重新捕获目标。针对这一问题, 本文在BiTrap轨迹预测网络[10]的基础上, 提出SiamTrap轨迹预测网络, 用于目标被遮挡时的轨迹预测。同时, 针对目标长时间被遮挡时缺乏真实目标信息而导致的预测误差累积, 提出搜索扩展策略以确保目标被重新捕获。SiamTrap的网络结构如图 3所示。
SiamTrap轨迹预测网络采用共享权重条件变分自编码器(CVAE)对目标的轨迹信息进行编码, 并采用2个前向解码器共同解码来预测目标的轨迹。
令Xt=(XBB, Xv), 表示从目标完全遮挡帧t观察到的目标历史轨迹, 其中, XBB={Xt-τ+1BB, Xt-τ+2BB, …, XtBB}表示从第t帧观察的过去τ帧目标边界框信息, XtBB为第t帧中目标边界框的中心位置以及尺寸; Xv={Xt-τ+1v, Xt-τ+2v, …, Xtv}表示从第t帧观察的过去τ帧目标速度的历史信息。Yt=(YtBB, Ytv)为需要预测的目标未来轨迹, 其中, YtBB={Yt+1BB, Yt+2BB, …, Yt+δBB}表示未来δ帧的目标边界框, Ytv={Yt+1v, Yt+2v, …, Yt+δv}表示未来δ帧的目标速度。Ŷt=ŶtBB为模型预测的目标轨迹, 仅预测目标的边界框。编码过程如下所示。
模型训练时
 (5)
(5)
式中: GRU为选通控制单元, 下标代表对应编号; Fc为全连接层, 下标代表对应编号; htBB, htv分别为目标边界框历史信息XtBB、目标速度历史信息Xtv的特征向量; hYtBB, hYtv分别为预测轨迹真实值YtBB, Ytv的特征向量, (μZqBB, ΣZqBB)为经过识别网络(recognition network)Qφ(Z|Xt, Yt)获取的目标边界框潜变量ZBB的均值与标准差; (μZqv, ΣvZq)为经过识别网络Qφ(Z|Xt, Yt)获取的目标速度潜变量Zv的均值与标准差。⊕为按照维度进行拼接, 参数φ为网络参数。
模型推理时:
 (6)
(6)
式中:Pθ(Z|Xt)为先验网络(prior network); θ为网络参数。
在得到编码后, 利用改进的单向轨迹生成网络生成预测轨迹
 (7)
(7)
式中, 上标f1, f2分别代表前向分支1, 前向分支2。
 (8)
(8)
 (9)
(9)
式中,下标w为网络参数。同时, 因为原BiTrap轨迹预测网络针对的是智能驾驶场景下行人以及车辆轨迹预测, 为了使其能够对红外地面目标跟踪中的轨迹进行有效预测, 同时对UniTrap也进行了如下改进:
1) 使用UAV123数据集[11]作为训练集, 使得轨迹预测算法可以对地面目标跟踪过程中的目标运动进行建模;
2) 为减少历史轨迹中的噪声对于轨迹预测算法的干扰, 使用Savitzky-Golay滤波器对历史轨迹进行平滑处理;
3) 为了保证跟踪的实时性与预测的准确性, 利用观测5帧的目标历史轨迹预测未来2帧的目标轨迹, 即τ=5, δ=2, 并将预测的目标轨迹作为历史轨迹, 用于后续的预测。
 |
图3 SiamTrap预测算法网络架构 |
2.3 搜索扩张策略
针对短时遮挡, 通过SiamTrap轨迹预测算法, 对完全遮挡情况下的目标轨迹进行预测, 直至重新捕获目标; 针对长时遮挡, 由于缺乏有效的观测信息, 预测误差逐渐累积, 仅仅依靠原有搜索区域难以实现对目标的重新捕获, 故引入搜索扩张策略。
 (10)
(10)
式中:Ssearch为搜索区域边长; wtBB, htBB分别为目标的宽和高; ssearch为搜索区域的尺度参数, 默认ssearch=6;focc为连续遮挡的帧数; γ为搜索区域扩张因子, γ=2;m为长时遮挡判定帧数, 默认为20。
2.4 基于“二次判定”的目标重捕获机制
当目标被完全遮挡后, 利用SiamTrap算法对目标的轨迹进行预测, 依照预计的目标位置, 划定搜索区域, 并根据分类分支的响应来对当前搜索区域内的“目标”进行判定。但在目标被完全遮挡的过程中或被遮挡目标的结构没有完全出现时, 若跟踪区域内出现相似目标, 则跟踪器仍旧非常容易漂移到相似干扰物上而导致跟踪失败。为防止漂移到相似目标上, 在此提出了基于“二次判定”的目标判定准则。
当跟踪过程中, 没有相似目标或背景干扰时, 通过第一次判定, 直接对重新出现的高置信度“目标”进行捕获
 (11)
(11)
式中, β1=0.55。
在未满足(11)式时, 即无法准确判定“目标”, 需要对该“目标”进行二次判定:
首先, 根据(2)式, 确定该帧中“目标”的位置(xtBB′, ytBB′); 然后, 以(xtBB′, ytBB′)为中心, 以原搜索区域面积1/2为面积, 划定进行二次判定的搜索区域, 并获取分类特征g′t。
 (12)
(12)
最后, 通过(1)式, 对“目标”进行二次判定
 (13)
(13)
式中, β2=0.35。
3 实验及结果分析
3.1 实验条件
本文使用LSOTB-TIR数据集[12]中训练集对网络进行训练, 自主收集并标注了12条含有目标遮挡的序列, 在LSOTB-TIR数据集的测试集中挑选了11条遮挡序列,二者共同组成了23条含有遮挡的地面目标跟踪序列的测试集。LSOTB-TIR数据集为当前红外目标跟踪领域最大的数据集, 包含47种跟踪目标和12种跟踪挑战, 具有足够的普适性和通用性。选用11种主流的目标跟踪算法TLD[1]、KCF[13]、ECO[14]、SiamFC[15]、SiamRPN++[16]、SiamMask[17]、SiamCAR[18]、ATOM[19]、DiMP[20]、PrDiMP[21]以及SuperDiMP, 对所提SuperDiMP-SiamTrap算法进行对比分析, 以验证所提算法的有效性。本文中以SuperDiMP算法为基准算法,下文统一写作baseline算法。
算法运行的PC配置为Intel®CoreTMi7-7700K This email address is being protected from spambots. You need JavaScript enabled to view it. GHz, RAM为16 GB, 单块NVIDIA GeForce RTX 1080 Ti, 操作系统为Ubuntu 18.04.6 LTS。
3.2 评价指标
本文采用object tracking benchmark(OTB[22])中提出的评价指标, 包含精确度(precision pre)与成功率(success rate)。精确度是根据目标中心位置误差在规定阈值内的帧数百分比值得出, 默认阈值为20 pixel, 中心位置误差ECL使用两点的欧氏距离表示
 (14)
(14)
式中:(x, y)为预测目标框的中心位置; (xg, yg)表示对应帧的目标真实位置。
成功率是根据预测目标框与真实目标框的重叠率大于规定阈值的帧数的百分比值得到, 默认的阈值为0.5。重叠率SO的计算方式可表示为
 (15)
(15)
式中: R表示预测目标区域; Rg表示目标的真实区域。
本文采用一次性评价指标(one-pass evaluation, OPE),利用第一帧对目标跟踪算法进行标定,完成跟踪算法的初始化,然后对整段序列进行跟踪,得到目标跟踪的平均精度和成功率。
3.3 定量分析
利用精确度一次性评价与成功率一次性评价对算法进行定量对比分析。
从图 4可以看出,与baseline算法SuperDiMP相比,本文算法的平均精确度提升5.9%,平均成功率提升5.2%,这完全得益于本文所提出的抗遮挡策略,使得baseline算法能够有效应对遮挡问题。得益于baseline算法本身对于部分遮挡的鲁棒性以及所提抗遮挡策略的有效性,本文算法同TLD算法相比平均成功率高出23.4%,平均成功率高出26.4%;同PrDiMP、DiMP、SiamRPN++、ECO等算法相比,本文算法的平均精确度至少高出18%,平均成功率至少高出13.5%。
各算法在误差阈值为20pixel时的平均精确度以及平均帧率的对比,如表 1所示。
依据表 1可以看出,本算法的平均精确度较baseline高出5.9%,而平均帧率略低于baseline的41.3 frame/s。这主要得益于SiamTrap轨迹预测算法的提出以及应用方法的改进,使得算法可以在付出较低的实时性代价的同时,更为有效地应对遮挡情况下的地面目标跟踪。与其他算法相比较,本算法的平均精确度较速度最快的KCF算法高出55.7%,较SiamFC算法高出34%。相较于SiamCAR、SiamMask、SiamRPN++、SiamFC这些孪生网络系列算法,本文算法的平均精确度至少提升20%以上。
 |
图4 不同算法一次性评价指标图 |
一次性评价的算法跟踪性能比较
3.4 定性分析
所有算法的部分测试结果如图 5所示。
在如图 5所示的跟踪效果中,可以得出如下结论:①对于短时遮挡,本文算法可以对目标状态进行准确判定,并利用轨迹预测算法来预测目标位置。除TLD算法外,SuperDiMP(baseline)、ATOM、DiMP算法仅在前一帧位置进行等待,最终漂移到背景干扰上;②对于长时遮挡,本文提出的搜索扩张策略,能够很好地弥补轨迹预测的累积误差,确保重新捕获目标。而SiamFC、KCF、ECO等算法的搜索区域尺寸固定使得目标在长时遮挡后完全脱离搜索区域,导致跟踪失败;③当目标被遮挡后,当搜索区域内出现“目标”时,本文提出的“二次判定”准则能够对“目标”进行准确判别,确保回归正常跟踪,而TLD算法无法对“目标”进行准确判定,漂移到相似干扰上,致使跟踪失败。
 |
图5 部分序列测试结果展示 |
3.5 消融实验
为了充分验证SiamTrap轨迹预测算法以及跟踪策略的有效性,本文进行了消融实验,如表 2所示。
表中,baseline即SuperDiMP跟踪算法的原有跟踪策略;SuperDiMP-BiTrap算法与SuperDiMP-SiamTrap算法采用相同的抗遮挡措施,区别在于分别使用了BiTrap轨迹预测算法、SiamTrap轨迹预测算法。
如表 2所示,与SuperDiMP跟踪算法相比,SuperDiMP-BiTrap、SuperDiMP-SiamTrap算法的精确度与成功率都有了较大提升,这表明本文提出的抗遮挡策略能够有效地应对地面目标遮挡问题;与SuperDiMP-BiTrap相比,SuperDiMP-SiamTrap算法的精确度与成功率分别提升了2.5%, 2.4%。表明本文提出的SiamTrap轨迹预测算法的有效性。
消融实验结果
3.6 跟踪失败案例分析
图 6展示了本文算法的一些失败案例,虽然本文方法采用了“二次判定”的方法来消除跟踪物体在被遮挡重新出现后附近物体干扰的问题,但因为红外图像缺乏颜色、纹理等细节信息的特性,导致“二次判定”方法在远距离,跟踪目标较小的情况下难以区分出外观高度相似的同类干扰物而导致跟踪失败,这个问题将在未来进一步研究。
 |
图6 跟踪失败案例 |
4 结论
本文基于SuperDiMP跟踪算法,提出了一种基于轨迹预测网络的抗遮挡智能跟踪算法。该算法通过遮挡判定准则对目标状态进行判定,并在目标被遮挡后,使用改进的轨迹预测网络对目标的轨迹进行预测,并在长时遮挡时,使用搜索扩张策略以弥补轨迹预测误差,在“目标”重新出现后,利用“二次判定”准则对“目标”进行甄别,保证对目标的重新捕获。从实验结果来看,所提的抗遮挡算法明显提升了跟踪算法在树木、建筑物等背景遮挡情况下的跟踪精度与鲁棒性,相较于baseline算法,在极少的实时性损失下,平均精确度与平均成功率分别提升了5.9%, 5.2%。
References
- KALAL Z, MIKOLAJCZYK K, MATAS J. Tracking-learning-detection[J]. IEEE Trans on Pattern Analysis and Machine Intelligence, 2011, 34(7): 1409–1422 [Google Scholar]
- CHEN Faling, DING Qinghai, LUO Haibo, et al. Anti-occlusion real time target tracking algorithm employing spatio-temporal context[J]. Infrared and Laser Engineering, 2021, 50(1): 20200105 (in Chinese) [CrossRef] [Google Scholar]
- AKIN O, ERDEM E, ERDEM A, et al. Deformable part-based tracking by coupled global and local correlation filters[J]. Journal of Visual Communication and Image Representation, 2016, 38: 763–774. [Article] [CrossRef] [Google Scholar]
- ONDRUSKA P, POSNER I. Deep tracking: seeing beyond seeing using recurrent neural networks[C]//Thirtieth AAAI Conference on Artificial Intelligence, 2016 [Google Scholar]
- ZHU Z, WANG Q, LI B, et al. Distractor-aware siamese networks for visual object tracking[C]//Proceedings of the European Conference on Computer Vision, 2018: 101–117 [Google Scholar]
- GUPTA D K, GAVVES E, SMEULDERS A W. Tackling occlusion in Siamese tracking with structured dropouts[C]//2020 25th International Conference on Pattern Recognition, 2021: 5804–5811 [Google Scholar]
- DIAO Z. A single target tracking algorithm based on Generative Adversarial Networks[J/OL]. (2019-12-27)[2023-05-08]. [Article] [Google Scholar]
- YUAN D, SHU X, LIU Q, et al. Aligned spatial-temporal memory network for thermal infrared target tracking[J]. IEEE Trans on Circuits and Systems Ⅱ: Express Briefs, 2022, 70(3): 1224–1228 [Google Scholar]
- MA S, YANG Y, CHEN G. AODiMP-TIR: anti-occlusion thermal infrared targetstracker based on SuperDiMP[J]. IET Image Process, 2024, 18: 1780–1795. [Article] [CrossRef] [Google Scholar]
- YAO Y, ATKINS E, JOHNSON-ROBERSON M, et al. BiTrap: bi-directional pedestrian trajectory prediction with multi-modal goal estimation[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1463–1470. [Article] [CrossRef] [Google Scholar]
- MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking[C]//European Conference on Computer vision, 2016: 445–461 [Google Scholar]
- LIU Q, LI X, HE Z, et al. LSOTB-TIR: a large-scale high-diversity thermal infrared object tracking benchmark[C]//Proceedings of the 28th ACM International Conference on Multimedia, 2020: 3847–3856 [Google Scholar]
- HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Trans on Pattern Analysis And Machine Intelligence, 2014, 37(3): 583–596 [Google Scholar]
- DANELLJAN M, BHAT G, SHAHBAZ KHAN F, et al. ECO: efficient convolution operators for tracking[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6638–6646 [Google Scholar]
- BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional siamese networks for object tracking[C]//European Conference on Computer vision, 2016: 850–865 [Google Scholar]
- LI B, WU W, WANG Q, et al. SiamRPN++: Evolution of siamese visual tracking with very deep networks[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 4282–4291 [Google Scholar]
- WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: a unifying approach[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 1328–1338 [Google Scholar]
- GUO D, WANG J, CUI Y, et al. SiamCAR: siamese fully convolutional classification and regression for visual tracking[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6269–6277 [Google Scholar]
- DANELLJAN M, BHAT G, KHAN F S, et al. ATOM: accurate tracking by overlap maximization[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 4660–4669 [Google Scholar]
- BHAT G, DANELLJAN M, GOOL L V, et al. Learning discriminative model prediction for tracking[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 6182–6191 [Google Scholar]
- DANELLJAN M, GOOL L V, TIMOFTE R. Probabilistic Regression for Visual Tracking[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 7183–7192 [Google Scholar]
- WU Y, LIM J, YANG M H. Online object tracking: a benchmark[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2013: 2411–2418 [Google Scholar]
All Tables
All Figures
|
图1 本文提出的跟踪器算法框架 |
| In the text | |
|
图2 目标正常跟踪以及完全遮挡情况下分类分支的响应图 |
| In the text | |
|
图3 SiamTrap预测算法网络架构 |
| In the text | |
|
图4 不同算法一次性评价指标图 |
| In the text | |
|
图5 部分序列测试结果展示 |
| In the text | |
|
图6 跟踪失败案例 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.