| Issue |
JNWPU
Volume 37, Number 1, February 2019
|
|
|---|---|---|
| Page(s) | 186 - 194 | |
| DOI | https://doi.org/10.1051/jnwpu/20193710186 | |
| Published online | 03 April 2019 | |
The Numerical Simulation of UAV's Landing in Ship Airwake
无人机着舰流场的数值模拟研究
1
School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China
2
Science and Technology on UAV Laboratory, Northwestern Polytechnical University, Xi’an 710065, China
Received:
11
January
2018
Abstract
In order to investigate the influence of ship airwake on aerodynamic characteristics of the carrier-based aircraft, UAV's landings in different winds over deck were simulated by Overset Mesh method. Firstly, mesh factors, steady and unsteady methods were compared based on single aircraft carrier. The results showed that the boundary layer mesh around ship didn't show obvious influence for our simulation, and the calculation results between the steady and unsteady time average showed a similar trend. Then, aircraft carrier's flow fields in three wind directions were analyzed, and ship airwake variations with different direction winds over deck were concluded as well. Next, the reliability of Overset Mesh was verified though single UAV's landing simulation. Finally, the coupled flow fields of UAV/ship were studied. The calculation results indicated that aircraft was always in a low dynamic pressure condition, the lift and pitching moment of UAV had apparent changes in landing. Meanwhile, the aerodynamic fluctuations of UAV also revealed differences in different wind directions. The simulation results can be regarded as a reference for the safety assessment of carrier-based aircraft's landing and its control in the future.
摘要
针对航母尾迹对舰载机着舰过程气动特性的影响,采用嵌套网格的方法,对无人机在不同风向下的着舰过程进行了数值模拟。首先,对不同网格划分,定常和非定常计算进行了比较,发现有无附面层对航母流场结果影响不大,下滑线上定常计算的结果和非定常时均的结果类似。然后,对0°和±15°风向下的航母流场进行了分析,表明航母尾迹随风向的变化而变化。接着,对单独无人机降落的过程进行了模拟,验证了所建立的嵌套网格的可靠性。最后,对耦合航母情况下无人机的着舰进行了仿真,结果表明降落过程中飞机一直处于低动压的状态,升力和俯仰力矩变化明显,不同风向下着舰气动特性的变化也存在差异。研究结果为以后舰载机安全着舰的评估和控制提供了参考。
Key words: ship airwake / UAV / carrier landing / numerical simulation / Overset Mesh / unsteady aerodynamics
关键字 : 舰船尾迹 / 无人机 / 着舰飞行 / 数值模拟 / 嵌套网格 / 非定常气动力
© 2019 Journal of Northwestern Polytechnical University
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
航母是一个国家海军力量的重要体现, 实现舰载机在航母上的安全起降才能最大程度地发挥航母的作用。航母的甲板上存在着高大的塔形舰岛, 其后会形成大的分离区, 左右舷也存在着卷起的分离涡[1-2]; 在航母尾部, 下沉的气流形成“公鸡尾流”[3]。同时, 在实际航行中, 航母还存在自身的六自由度运动, 这就使得航母的尾迹变得更加复杂, 对舰载机的安全着舰造成较大影响[4-5]。因此, 开展舰载机和航母耦合流场的研究具有十分重要的意义。
由于孤立舰船流场相对简单, 因此国内外学者对单独舰船进行了大量的数值研究。Susan等[6-7]计算了一系列不同的甲板风, 研究了舰船流场的马赫数无关性, 雷诺数无关性; Anupam等[8]利用PUMA求解器计算了LPD 17舰船在0°和30°风向下的气流场, 比较了定常与非定常结果, 研究了涡的脱落特性; 洪伟宏等[9]采用CFX对比了不同上层建筑形式及布局对LHA舰船空气流场的影响; 郜冶等[10-12]利用Fluent的k-ε模型计算了SFS2简单护卫舰和美国CVN舰船在不同风向角时的非定常气流场, 分析了舰载机降落航线上的速度分布, 且结果与实验符合较好。
虽然孤立舰船流场的研究取得了不少成果, 但由于未考虑飞机与舰船之间的相互作用, 因此其流场结果还难以直接为舰载机的着舰提供指导。随着CFD技术的发展, 机/舰耦合流场的研究逐渐兴起。顾璇[14]利用非结构动网格, 计算了某飞机在靠近、经过、远离平台过程中的气动特性参数, 但所用的平台只是一个简单的长方体而非真实航母模型, 且由于采用动网格, 飞机运动过程中网格的质量难以保证; 程捷[15]利用滑移网格技术, 对旋翼/舰船之间的相互干扰进行了分析, 但计算只涉及到旋翼的悬停且未考虑风向对旋翼气动特性的影响。此外, 还有一些学者对旋翼的等效及与舰船耦合的模拟进行了研究[16-18], 但对于固定翼飞机在航母流场中的数值模拟却并不多见, 导致对其着舰过程中气动特性的变化缺乏深入的认识。这主要是因为固定翼飞机特殊的着舰方式以及与航母较大的尺寸差异, 耦合流场计算时往往需要较多的网格, 使得计算成本较大。
嵌套网格技术适用于刚体大范围的运动, 由于不涉及网格的变形, 网格质量可以得到保证, 同时由于各个部分网格可以独立划分有助于减少网格量, 具有较高的计算效率。因此, 本文将采用嵌套网格的方法开展固定翼飞机耦合航母流场的模拟。研究3种不同风向下航母尾迹的特点, 并分析飞机着舰过程中气动特性的变化, 以期为舰载机安全着舰的评估和控制提供参考。
1 数值模拟模型构建
1.1 模型介绍
本文采用的航母模型和无人机模型如下所示:
航母长L=260 m, 宽W=60 m, 高H=44.782 m, 甲板距海平面15 m左右。坐标原点取在航母前端甲板上最左端的顶点, 且取x轴从航母的船头指向船尾, y轴从航母的左舷指向右舷, z轴则垂直航母甲板, 竖直向上, 规定左舷风为正, 右舷风为负。
1.2 无人机运动描述
飞机对地速度(绝对速度)大小60 m/s, 航迹角取0°, 下滑角为4°, 飞机对称面与x轴夹角9°, 且通过斜甲板中心线。飞机对地3个方向速度分量:
风的速度取15 m/s;
风向0°时, 空气相对飞机速度为Vx=74.117 m/s, Vy=9.363 m/s, Vz=4.1856 m/s, V=74.823m/s;
风向15°时, 空气相对飞机速度为Vx=73.606 m/s, Vy=13.246 m/s, Vz=4.185 m/s, V=74.905 m/s;
风向-15°时, 空气相对飞机速度为Vx=73.606 m/s, Vy=5.481 m/s, Vz=4.185 m/s, V=73.928 m/s;
考虑到计算花费, 选取着舰阶段最后2 s进行研究。飞机起始重心为:(371.833, 30.5953, 13.188)。匀速下降2 s后, 飞机的重心坐标为(253.599, 11.869, 4.817), 此时飞机已经上舰。在2 s的时间内, 时间间隔取为0.1 s, 在下滑线得到20个位置, 以此来分析飞机下降过程中的气动特性。
升力和阻力是在气流轴系中定义的, 需要转化到计算轴系中[19]。在计算坐标系中, 升力CL的方向为(-sinαcos9°, -sinαsin9°, cosα), 阻力CD的方向为(sinαcosβcos9°-sinβsin9°, cosαcosβsin9°+sinβcos9°, sinαcosβ)。
根据空气相对飞机的速度就可以知道阻力的方向, 进而可以求出攻角和侧滑角, 如表 1所示。
飞机3个方向的力矩根据体轴系定义, 如图 2所示。
在体轴系中, ox轴指向机头, oy轴指向右机翼, oz轴垂直oxy平面指向下, 3个轴之间满足右手定则。
俯仰力矩用Cmy表示, 在计算坐标系中方向为(-sin9°, cos9°, 0),
滚装力矩用Cmx表示, 在计算坐标系中方向为(-cos9°, -sin9°, 0),
偏航力矩用Cmz表示, 在计算坐标系中方向为(0, 0, -1)。
飞机着舰参数与风向的对应关系
 |
图2 无人机示意图 |
2 单独航母流场分析
计算状态取海平面标准大气, 风速约为15 m/s, 规定左舷风为正, 右舷风为负。湍流模型采用Menter等[20-21]提出的SST k-ω湍流模型, 求解不可压RANS方程, 所有计算状态远场边界均采用速度入口和压力出口。
2.1 航母流场计算影响因素分析
由于不关心航母本身的受力情况, 因此对有无附面层的航母网格进行了比较。分别生成3套网格, 网格量分别为435万, 512万和658万, 第一套网格没有生成附面层, 后面2种网格均生有附面层, 利用这3套网格对0°风向下航母的流场进行定常计算。在定常收敛的情况下, 取航母x=210 m处甲板上方z=5 m, 长度为船宽60 m的线段上的速度进行分析, 如图 1线段所示。对有附面层和没附面层的3种网格参考线段上的速度进行比较, 如图 3所示。
从图 3可知, 从3个方向速度对比可以看出, 参考线段上有无附面层3个方向速度趋势均没有太大差异。从减少网格量的角度出发, 以后均采用无附面层的网格进行计算。
采用无附面层的435万网格, 基于定常收敛的结果, 然后进行非定常计算, 比较2种计算状态下, 下滑线(见图 1)上的速度。时间步长为Δt=0.005 s, 每个时间步迭代10次。取航母甲板尾部监视点point-2(见图 1)的y方向速度收敛曲线如下所示:
从图 4可以看出, 从t=20.0 s之后, Vy呈现出一定周期性的波动, 流场进入非定常状态, 而在t=4.0 s之前速度波动不大。取下滑线上不同时刻的速度如图 5所示。可以看出, 基于定常收敛的结果, 在非定常计算t=4.0 s时间范围内, 下滑线上速度分布没有剧烈的变化, 定常计算的结果与非定常时均的结果差别不是很大, 表明定常计算能反映出流场的平均特性。由于非定常时均计算非常耗时间, 因此, 本文只对航母定常计算的流场进行分析, 对其时均特性进行了解。
基于以上分析, 本文接下来的分析均是基于没有附面层的航母网格进行定常计算, 将分别从三维和二维方面来研究航母流场及尾迹的特点。
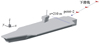 |
图1 航母模型及无人机着舰示意 |
 |
图3 不同网格计算结果比较 |
 |
图4 非定常计算point-2 Vy收敛曲线 |
 |
图5 下滑线定常和非定常速度比较 |
2.2 风向对航母尾迹的影响分析
分别对0°风向、15°风向和-15°风向下航母的三维流线, 下滑面速度, 下滑线速度进行对比, 分别如图 6~8所示。
从图 6中可以看出, 航母的舰岛迎风面静压较大, 这主要是因为它们对风的阻滞作用比较明显。同时, 舰岛后面的流场比较紊乱, 流线出现明显的弯曲。在0°风向时, 舰岛后面存在明显的分离涡。当风向为15°和-15°时, 甲板上靠近左舷和右舷的位置则存在很长的边缘涡。同时, 由于边缘分离涡和舰岛后分离区的共同影响, 航母的尾流变得更加的复杂。
从图 7下滑面可以看出, 航母的尾迹受风向影响明显, 这主要体现在舰岛后的流动分离区, 它随着风向的变化而发生相应的偏转。另外, 在舰岛的分离区内, 来流速度明显减小, 属于顺风区。在穿越此分离区时, 无人机的气动特性可能会有较大的变化。
从图 8a)可以看出, 在x > 300 m时, 由于此时离航母尾部比较远, 3种风向对应的下滑线的Vx差别不是很大。但随着靠近航母尾部, 0°和-15°风向对应的Vx均有不同程度地减小, 但15°风向计算下的Vx却有所增大。从图 7可知, 这主要和舰岛后分离区和下滑线的相对位置有关。而对于Vz来说, 随着靠近航母, 0°和15°风向的下洗呈现了先增强后减弱的趋势, 当x < 260 m时, 0°下滑线上变成了上洗。然而, 在-15°风向计算时, 下滑线上的Vz却呈现出了相反的趋势。在x > 280 m时, 随着靠近航母上洗逐渐增强, 到280 m时, 上洗达到了1.5 m/s, 随后其值逐渐减小, 当x < 265 m以后, 下滑线上又变成了下洗。
 |
图6 3种风向下流场三维流线 |
 |
图7 下滑面速度对比 |
 |
图8 下滑线速度分布 |
3 单独无人机运动计算
本文采用嵌套网格进行无人机的着舰模拟。为验证嵌套网格技术的可靠性, 在没有航母存在时, 对单独无人机定常计算和沿下滑线降落过程中的气动力和力矩进行了比较, 无人机嵌套网格如下所示:
无人机网格量为115万, 定常计算时, 保持无人机静止, 远场速度为1.2节得到的空气相对飞机的和速度; 非定常计算时, 远场速度为15 m/s, 无人机速度为其绝对速度。非定常计算时间步长Δt=0.005 s, 内迭代次数取为50次。无人机运动到2 s时, 停止计算, 并对2 s内无人机的升力系数和力矩系数进行对比分析, 如图 10所示:
由于没有航母尾流的干扰, 无人机在下降的过程中, 气动力和力矩基本保持不变, 定常与非定常结果吻合较好, 表明所用的嵌套网格的计算方法是可行的。
 |
图9 无人机嵌套网格 |
 |
图10 0°风向下单独无人机降落 |
4 耦合航母时无人机着舰分析
验证了嵌套网格的可靠性, 对耦合航母时无人机在3种风向下的着舰进行模拟。耦合流场网格总量为550万, 所用网格如图 11所示:
计算时, 先进行定常计算, 然后再进行非定常计算。为保证计算的稳定性, 当非定常计算到t=2.0 s时, 再给无人机加载运动, 时间步长Δt=0.005 s, 内迭代次数取为50, 到t=4.0 s时运动结束, 此时无人机已处于航母甲板上方, 重心距甲板大约5 m。
根据以上确立的计算方法对无人机着舰进行计算, 可得到着舰过程中的气动力和力矩随离舰距离的变化。此外, 再截取3个时刻(t=2.8 s, t=3.5 s和t=4.0 s)无人机的展向升力分布与定常计算的结果进行对比, 结果分别如图 12~14所示:
从图 12a)可知, 在整个降落过程中, 阻力没有大的变化, 升力整体表现为先下降然后再上升, 在x=280 m时达到最小值, 这和图 8c)中0°风向下滑线Vz速度的分布是一致的。在x > 260 m时, 升力系数均小于图 10a)单独无人机降落时的升力系数。而在t=4.0 s时, 无人机完全处于航母甲板上, 此时存在的上洗和地面效应使得飞机的升力有所增加。由图 12b)可知, 0°风向对应右侧滑, 侧滑角较小, 偏航力矩没有大的变化, 基本保持为0;在x > 300 m时, 滚转力矩一直为负, 随着靠近航母逐渐接近于0而趋向正值, 这从图 12c)展向升力分布的变化也可以看出, 在t=4.0 s时, 飞机实际表现类似为“左侧滑”。
再来看15°风向的结果, 结合图 8c)可知, 由于下洗的作用, 图 13a)中飞机的升力一直比较小, 在x=280 m之后才逐渐增大, 但始终小于定常计算的结果, 图 13c)的展向升力分布也说明了这一点。
从图 13b)可知, 无人机开始为左侧滑, Cmx为正, 但随着不断靠近航母, 滚转力矩Cmx逐渐由减小而趋向0。而从图 13c)可知, 在t=4.0时, 无人机左右机翼的升力分布基本相同, 右滚趋势减弱。同时, 俯仰力矩的变化和图 12b)类似, 且和升力变化相反。
-15°风向时, 飞机侧滑角较大, 左右机翼不对称性明显, 如图 14c)所示。而随着靠近航母, 左右机翼的升力分布差别逐渐较小。结合图 8c), 由于下滑线大部分处于上洗区, 因此无人机的升力系数比定常计算的值要大, 这从图 14c)也可以看出。与之前2种风向不同的是, 在x < 300 m后, 无人机的升力一直在减小。但从图 8c)看, 在x > 280 m之前, 下滑线的上洗是不断增强的, 但升力没有增加反而在减小, 需要进一步分析其原因。
取单独航母计算的流场, 在下滑面上, 以下滑线为对称线, 分别截取长度为展长的3条线段, 分析这3条线段上Vz和Vx的变化, 如图 15所示:
由上图可知, 在-15°风向时, 由于舰岛尾迹向左偏转, 无人机在着舰时不可避免要穿越舰岛后的分离区, 左右机翼会在非常短的时间内经历不同的流动。结合图 15b)和图 15c), 舰岛后的分离区是一个比较大的漩涡, 区域内的速度明显小于来流速度。同时, 由于漩涡旋转方向的原因, 飞机在开始靠近时会遭遇上洗, 而后就会遭遇下洗。line-2和line-3处流场表现出上洗的特征, 而line-1上基本都是下洗。在line-3处, 不仅存在上洗, 且当地流速和远处来流基本一致, 因此升力比定常计算的要大。而在line-2处, 虽然上洗进一步增强, 但由于完全处于舰岛分离区内, 当地流场速度与来流速度相比明显减小, 因而此处的升力反而要比line-1处的要小。当经过line-2后, 飞机会逐渐接近下洗区域, 当地流速虽然有所增加, 但依然小于远方来流速度, 因而导致升力进一步减小。
综上所述, 航母尾迹受风向影响较大, 具有鲜明的局部特征, 主要是由于舰岛后的分离流动造成的, 无人机着舰区域速度比较紊乱, 且沿展向变化明显, 左右机翼可能遭遇完全不同的速度场, 这对飞机的控制提出了更高的要求。
 |
图11 耦合计算网格 |
 |
图12 0°风向无人机着舰计算结果 |
 |
图13 15°风向无人机着舰计算结果 |
 |
图14 -15°风向无人机着舰计算结果 |
 |
图15 -15°风向下滑面典型位置速度分布 |
5 结论
针对固定翼飞机与航母耦合流场数值模拟研究不足的现状, 利用嵌套网格技术, 对无人机在航母流场中的着舰过程进行了数值计算, 得出的主要结论有:
1) 在定常计算时, 有无附面层的网格对航母甲板流场没有太大影响。定常计算的结果和非定常时均的结果比较相似, 可以反映出流场的平均特征。
2) 航母的尾迹复杂多变, 受风向影响明显, 且随着靠近航母, 扰动逐渐增强。无人机在航母尾迹中处于低动压的状态, 左右机翼流场的不对称使得无人机的气动特性随离舰距离不断发生变化。
3) 无人机的升力, 俯仰力矩和滚装力矩受尾迹影响较大。0°风向和15°风向时, 随着下滑, 无人机的升力先变小再变大, 飞机受下洗作用明显。15°风向时飞机对应的升力最大下降了18%;而在-15°风向时, 无人机在穿越舰岛后方的分离区时, 虽然存在上洗, 但由于顺风, 随着靠近航母飞机的升力一直在减小。
因此, 在实际着舰过程中, 舰载机需要及时打舵才能平衡各个方向的气动力和力矩, 避免可能的危险。
References
- Ben Lianliang, Wei Xiaohui, Liu Chenglong, et al. Effects of Air Flow on the Landing Track of the Carrier Aircraft[J]. Ship Science and Technology, 2014, 36(1): 27-30 (in Chinese) [Article] [Google Scholar]
- Zhao Yongzhen. Numerical Simulation of Steady and Unsteady Air Flow Field Around Large Ship[D]. Harbin, Harbin Engineering University, 2012 (in Chinese) [Google Scholar]
- An Jun. Numerical Simulation of Aircraft Carrier Airwake and Preliminary Study on Control Law for Automatic Carrier Landing[D]. Wuhan, Huazhong University of Science & Technology, 2012 (in Chinese) [Google Scholar]
- Duan Pingping. Investigation on Dynamic Performance Analysis for Carrier-Based Aircraft during Landing Process[D]. Nanjing, Nanjing University of Aeronautics and Astronautics, 2012 (in Chinese) [Google Scholar]
- He Shaohua, Liu Dongyue, Tan Dali, et al. A Review of Researches on Ship Airwakes[J]. Ship Science and Technology, 2014, 36(2): 1-7 (in Chinese) [Article] [Google Scholar]
- Susan A P. CFD Prediction of Airwake Flow Fields for Ships Experiencing Beam Winds[C]//21st AIAA Applied Aerodynamics Conference. Orlando, 2003: 23-26 [Google Scholar]
- Susan Polsky, Stephen Naylor. CVN Airwake Modeling and Integration: Initial Steps in the Creation and Implementation of a Virtual Burble for F-18 Carrier Landing Simulations[C]//Proceedings of AIAA Modeling and Simulation Technologies Conference and Exhibit, 2005: 1-9 [Google Scholar]
- Anupam S, Lyle N L. Airwake Simulations on an LPD 17 Ship[C]//15th AIAA Computational Fluid Dynamics Conference, Anaheim, California, 2001 [Google Scholar]
- Hong Weihong, Jiang Zhifang, Wang Tao. Influence on Air-Wake with Different Layout of Ship Superstructure[J]. Chinese Journal of Ship Research, 2009, 4(2): 54-68 (in Chinese) [Article] [Google Scholar]
- Wang Jinling, Gao Ye, Liu Changmeng. Research on Mesh Type for Complex Ship[J]. Journal Huazhong University of Science & Technology, 2015(11): 99-103 (in Chinese) [Article] [CrossRef] [Google Scholar]
- Gao Ye. Numerical Simulation of Turbulent Wind Field around Large-Scale Marine Structures[D]. Harbin, Harbin Engineering University, 2014 (in Chinese) [Google Scholar]
- Gao Ye, Liu Changmeng, He Zheng. Research on CVN Deck Vortices Structure Characteristics Caused by Wind Direction Changes[J]. Acta Aerodynamic Sinica, 2013, 31(3): 310-315 (in Chinese) [Article] [Google Scholar]
- Gao Ye, Xie Huisong. The Numerical Simulation of Flow around the Warship during Ramp Ski-Jump Take-Off[J]. Acta Aerodynamic Sinica, 2008, 26(4): 513-518 (in Chinese) [Article] [Google Scholar]
- Gu Xuan. Aerodynamic Analysis on Near-Ground/Sea Motion[D]. Harbin, Harbin Engineering University, 2009 (in Chinese) [Google Scholar]
- Cheng Jie. Investigation of Ship Airwake and Rotor Aerodynamics Based on DES[D]. Wuhan, Huazhong University of Science and Technology, 2015 (in Chinese) [Google Scholar]
- Su Dacheng, Shi Yongjie, Xu Guohua, et al. Numerical Study of the Coupled Flowfield of Ship/Helicopter[D]. Acta Aeronautica Astronautica Sinica, 2017, 38(7): 75-86 (in Chinese) [Google Scholar]
- Huang Bin. Numerical Study of Coupled Flowfield and Flight Envelop for Shipborne Helicopters[D]. Nanjing, Nanjing University of Aeronautics and Astronautics, 2015 (in Chinese) [Google Scholar]
- Rajmohan Nischint, Zhao Jinggen, He Chengjian. An Efficient POD Technique to Model Rotor/Ship Airwake Interaction[C]//68th American Helicopter Society Annual Forum Fort Worth, Texas, 2012 [Google Scholar]
- Fang Zhenping, Chen Wanchun, Zhang Shuguang. The Flight Dynamics of Aerodynamic Aircraft[M]. Beijing, Beijing University of Aeronautics and Astronautics Press, 2005 [Google Scholar]
- Menter F R, Rumsey L C. Assessment of Two-Equation Turbulence Models for Transonic Flows[C]//25th AIAA Fluid Dynamics Conference, Colorado, 1994 [Google Scholar]
- Menter F R. Two Equation Eddy Viscosity Turbulence Models for Engineering Applications[J]. AIAA Journal, 1994, 32(8): 1598-1605 [Article] [NASA ADS] [CrossRef] [Google Scholar]
All Tables
All Figures
|
图2 无人机示意图 |
| In the text | |
|
图1 航母模型及无人机着舰示意 |
| In the text | |
|
图3 不同网格计算结果比较 |
| In the text | |
|
图4 非定常计算point-2 Vy收敛曲线 |
| In the text | |
|
图5 下滑线定常和非定常速度比较 |
| In the text | |
|
图6 3种风向下流场三维流线 |
| In the text | |
|
图7 下滑面速度对比 |
| In the text | |
|
图8 下滑线速度分布 |
| In the text | |
|
图9 无人机嵌套网格 |
| In the text | |
|
图10 0°风向下单独无人机降落 |
| In the text | |
|
图11 耦合计算网格 |
| In the text | |
|
图12 0°风向无人机着舰计算结果 |
| In the text | |
|
图13 15°风向无人机着舰计算结果 |
| In the text | |
|
图14 -15°风向无人机着舰计算结果 |
| In the text | |
|
图15 -15°风向下滑面典型位置速度分布 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.