| Issue |
JNWPU
Volume 38, Number 5, October 2020
|
|
|---|---|---|
| Page(s) | 977 - 986 | |
| DOI | https://doi.org/10.1051/jnwpu/20203850977 | |
| Published online | 08 December 2020 | |
3D Path Planning Method for UAV Based on Improved Artificial Potential Field
基于改进势场法的无人机三维路径规划方法
School of Automation, Northwestern Polytechnical University, Xi'an 710129, China
Received:
27
December
2019
Abstract
Path planning is the key technology for UAV to achieve autonomous flight. Considering the shortcomings of path planning based on the conventional potential field method, this paper proposes an improved optimization algorithm based on the artificial potential field method and extends it to three-dimensional space to better achieve flight constrained 3D online path planning for UAVs. The algorithm is improved and optimized aiming at the three problems of goal nonreachable with obstacle nearby (GNWON), easy to fall into local minimum, and path oscillation in traditional artificial potential field method. First, an improved potential field function with relative distance is used to solve the GNWON, and an optimized repulsive potential field calculation method based on different obstacles or threat models is proposed to optimize the planned path. Secondly, in order to make the drone jump out of the local minimum trap, a method of setting heuristic sub-target points is proposed. For local path oscillation, a method using memory sum force was proposed to improve the oscillation. The simulation results show that the improved optimization algorithm in this paper effectively makes up for the shortcomings of the traditional artificial potential field method, and the designed 3D online path planning algorithm for the UAV is practical and feasible.
摘要
路径规划是无人机自主飞行的关键,考虑到采用传统人工势场法路径规划的不足,提出了一种人工势场法的改进优化算法并扩展到三维空间,以更好地实现在飞行约束下的无人机三维在线路径规划。该算法针对传统人工势场法中的目标不可达、易陷入局部最小、局部路径震荡等3个问题,进行了改进与优化。首先采用含相对距离的改进势场函数处理目标不可达问题,并提出了一种基于不同障碍或威胁模型最近点的优化斥力势场计算方法来优化路径;其次,针对易于陷入局部最小的问题,提出了一种设定启发式子目标点的方法;最后,针对局部路径的震荡问题,提出了利用记忆性合力的方法抑制震荡,改善路径规划效果。仿真结果表明,新算法有效克服了传统人工势场法的不足,在无人机三维在线路径规划中具有应用价值。
Key words: unmanned aerial vehicle (UAV) / path planning / artificial potential field / heuristic sub-target / memory force / optimization algorithm / simulation
关键字 : 无人机 / 路径规划 / 人工势场法 / 启发式子目标点 / 记忆合力
© 2020 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
近年来,随着无人机在军事和民用领域的大规模应用,无人机自主飞行技术受到了国内外学者的广泛研究,逐渐成为国内外无人机技术领域的研究热点[1]。路径规划技术直接影响着无人机平稳、安全、自主的完成任务的能力[2]。
无人机路径规划就是根据无人机需要完成的特殊任务[2],综合其自身的飞行时间、距离和油耗等飞行性能约束,以及飞行环境中的地形、天气和威胁等外界因素和条件约束,为无人机规划出从一条从起点到终点的安全飞行路径。它的本质是寻求约束条件下的目标最优或者相对最优的过程。国内外众多学者对路径规划问题做了大量的研究,提出了很多算法。当前的路径规划算法可以分为两大类[3]:常规算法,如人工势场法、快速扩展随机树法(RRT)、A*算法、概率地图法(PRM)等;智能算法,如遗传算法、蚁群算法、粒子群算法、神经网络算法等。近年来,研究者不断提出新的路径规划方法或者对以往算法改进与融合。文献[4]将现有的单菌群蚁群算法改进,提出多菌群蚁群算法,多个菌群在规划时可以进行信息交互,找到更加优化的路径,但也需要更长的收敛时间。文献[5]提出一种新的动态系统方法,用于实时避障,动态系统的参数化调整增加智能体的反应性,这种方法适合二维机器人平台。文献[6]设定边界框阵列,并通过在阵列中进行随机采样来改进PRM算法,并利用改进启发函数的A*算法搜索路径。文献[7]将启发式贪婪算法与多种群遗传算法相结合,先将启发式贪婪算法用于路径搜索,再用遗传算法进行路径优化处理。文献[8]提出了一种RRT的改进算法,对狭窄通道区域的树枝进行选择性的优化收缩,并加入非碰撞测试。这些算法虽然对路径规划的优化都有很好的效果,但多数方法都是离线方法,并且由于算法自身收敛时间长、内存需求高等因素,在获得适合无人机的安全优化路径时效率很低。
而无人机在三维空间自主飞行时,所处多为复杂性和不确定性较高的环境。并且无人机需要在执行任务的过程中,依靠实时获取的飞行信息在线自主完成路径规划。因此就需要适合于无人机的在线三维路径规划算法。文献[9]提出了一种将动态贝叶斯网络(DBN)与模糊预测控制(MPC)相结合的无人机三维在线路径规划算法,利用DBN构建了威胁评估模型来描述等级概率,然后利用MPC方法进行在线路路径规划,但由于算法较为复杂实时性不高。另外,一些学者提出了新颖的算法用以、于无人机三维在线路径规划,文献[10]提出了一种核心路径图算法(CPG)进行规划,算法计算圆弧为满足几何约束的最小长度轨迹,并搜索图的2个任意节点之间的最优轨迹。但是,需求解多个二次方程,导致计算效率低下。文献[11]提出了基于受干扰流体系统(IFDC)启发的新颖的生物启发算法用于路径规划,该方法模仿了河中水顺利避开岩石并最终到达目的地的现象,与其他受生物启发的方法不同,此方法的最大优点是计算效率高且计划路径平滑。然而,由于流线的分布不够宽,因此即使适应了反应参数有时也难以获得可行的路径。
在现有的路径规划方法和算法中,由Khabit等[12]提出的人工势场法是一种实时在线的路径规划算法,并且可以满足无人机三维路径规划的要求。该方法具有计算时间短、满足实时控制、规划路径安全平滑的优点。但这种方法也存在目标不可达、容易陷入局部最小值、路径震荡等缺点[13]。针对这种情况,国内外很多学者对人工势场法进行了改进,文献[14]在势场中引入额外控制力将基于势场法的路径规划问题转为多目标优化问题来对无人机航迹规划进行优化,并通过计算加权成本函数来侧重优化目标。但其原型仍为传统人工势场,因此仍不可避免地存在传统人工势场法的问题,如路径震荡导致规划路径长度增加,并且该算法计算复杂度高,实时性较低。文献[15]提出了一种边缘跟随方法,沿着障碍物的边缘以跳过人工势场法的局部最小值,该方法势场模型仍为传统势场模型,并且在二维环境下仿真,不能满足无人机的要求。同时也存在传统方法的缺陷,局部最小等导致的飞行震荡,降低了安全性,路径震荡导致的规划路径较长等。文献[16]通过改变斥力函数克服目标不可达问题,并加入动态步长来减弱局部震荡,但对于2种问题的仿真均在二维环境中进行,并且对障碍模型没有研究,不符合本文三维环境下无人机的路径规划要求。文献[17]将障碍物凸化,并引入环流势场来跳过局部最小值,但在三维环境中不易实现。
针对上述问题,结合无人机的飞行性能约束和飞行环境,本文提出了一种改进的无人机三维在线人工势场方法。首先,针对传统势场法的局部最小问题,提出了一种启发式子目标点算法,使无人机能够有效地跳出局部最小;然后,针对传统算法的路径震荡问题,提出了一种记忆性合力算法消除了路径震荡;接着,在飞行环境方面加入不同障碍威胁模型,针对不同障碍威胁模型,提出了最近威胁点算法,并加入到改进的斥力势场模型中,解决了传统势场法忽略障碍模型的问题与目标不可达问题。最后,通过仿真验证了算法的有效性。
1 问题描述
无人机的三维在线路径规划问题,需要满足2个基本条件:①能够实时在线规划路径,规避飞行环境中的各种威胁,形成一条安全的路径。②符合其自身飞行性能约束。
综合考虑无人机的飞行性能,无人机路径规划需要满足的约束条件主要为以下几点[18]:
1) 最短航迹段约束:无人机在不同转弯之间,需要飞行一定的直线距离来修正航向偏差。
2) 最大转向角约束:无人机在转向时,需要在其飞行性能允许的最大转向角范围内转向。
3) 最大爬升角:无人机在爬升或俯冲时,由其自身飞行性能确定的在垂直面内的最大角度限制。
4) 路径总长度约束:无人机携带燃油有限,每一个航点的总和需小于或等于可飞行的最大距离。
本文将以上约束条件融入改进人工势场法中,获得了一种实时在线的三维无人机路径规划方法。
基于无人机飞行约束条件与人工势场法的局部规划算法特性,本文提出的改进算法适用于小型四旋翼无人机平台或者微小型固定翼无人机实验平台在进行局部路径规划时使用。本文算法适用的主要约束场景包括:①目标位置附近存在障碍物且障碍威胁在势场影响范围内;②飞行过程中存在多种威胁,如雷达威胁(球体模型)、高炮威胁(圆柱模型)、山丘与树木障碍(圆锥模型)等威胁;③遇到障碍组合飞行停滞,不能继续飞行的场景;④进行路径规划时容易出现路径震荡。
本文通过方法改进和算法设计满足上述要求和应用场景,并通过理论分析和仿真验证改进方法和算法的效果。
2 传统人工势场法原理
人工势场法的基本思想是,对目标点与障碍分别建立引力与斥力势场,综合引力与斥力对无人机的作用,由起点生成一条安全无威胁的路径,最终到达目标点。该算法只考虑无人机当前路径点上的合势场,由此计算下一路径点,无需生成完整路径,因此实时性很高。
本文将势场定义在三维空间O-xyz内, 以便处理无人机三维路径规划问题。具体原理如下。
引力场势能函数Uatt与斥力场势能函数Urep可以分别表示如下:
 (1)
(1)
 (2)
(2)
式中:X=(x, y, z)为无人机当前位置的坐标向量;Xg=(x, y, z)为目标点坐标向量;Xo=(x, y, z)为障碍坐标向量。katt, krep分别为引力势场与斥力势场系数, ρ(X, Xg)=‖X-Xg‖, ρo为障碍最大影响距离, ρ(X, Xo)=‖X-Xo‖。
引力Fatt和斥力Frep为其对应势场的负梯度
 (3)
(3)
 (4)
(4)
无人机所受的引力与n个障碍产生斥力的合力Ftot为
 (5)
(5)
合力Ftot为无人机提供了飞行方向, 可以安全地躲过障碍到达目标点。但也存在目标不可达、容易陷入局部最小值、路径震荡等缺点。
3 改进的人工势场法
3.1 改进人工势场函数
由上文传统人工势场法的基本原理可以看出, 目标点引力势场产生的引力会随着无人机的不断接近而减小, 而障碍斥力势场产生的斥力会随着无人机靠近障碍物而增大。因此, 如果障碍在目标点附近出现时, 会存在斥力大于引力的情况, 导致无人机在斥力的作用下不能继续向目标点飞行, 出现目标不可达的情况。
为了解决目标不可达问题, 需要对势场函数进行改进。以保证无人机即使在目标点附近且存在障碍时, 引力仍旧可以继续牵引无人机到达目标点, 并且, 目标点为合势场的全局最小点, 使无人机能够在到达目标点时稳定停下。
针对上述问题, 本文参考文献[16], 采用了一种改进势场方法, 引力势场与传统方法定义相同, 但在斥力势场函数中引入目标点与无人机的距离, 改进后的斥力势场函数如下
 (6)
(6)
式中, n为正常数。对斥力势场分别沿引力方向与基本势场的斥力方向求负梯度, 则可得斥力函数为
 (7)
(7)
式中
 (8)
(8)
 (9)
(9)
由(19)式可看出Frep1为障碍物指向无人机的斥力; Frep2方向为无人机指向目标点的引力。随着无人机向目标点靠近, Frep1逐渐减小趋于零。想要Frep2增大, 牵引无人机到达目标点, 需0 < n < 1。这样, 无人机在改进势场合力的作用下, 即使附近有障碍, 仍旧会向目标点靠近, 最终到达目标点。
进一步地, 考虑到无人机的条件约束问题, 需要在计算合力方向时加入无人机最大转向角φm与爬升/俯冲角μm约束。转向角约束条件为, -φm≤Δφ≤φm; 爬升/俯冲角约束条件为, -μm≤Δμ≤μm。Δφ与Δμ分别为当前时刻合力与下一时刻合力在水平面的夹角与在竖直面内的夹角。
3.2 基于不同障碍威胁模型的斥力势场计算
3.2.1 障碍威胁模型
在无人机实际飞行中, 实际遇到的障碍多为不规则的三维物体, 比如, 山丘等。如果在每一路径点沿着障碍物边界点计算斥力势场, 会导致规划的路径转弯频繁, 容易震荡, 不符合无人机最短航迹段约束条件。并且会导致路径损耗过大, 不满足无人机最大航程约束。因此, 本文在仿真中建立球体、圆锥、圆柱障碍模型, 以平滑路径, 保证无人机的平稳飞行。将常见的山丘近似为圆锥, 建筑物或者防空火炮的威胁区域可以化为圆柱, 雷达威胁区域当做球体处理。分别建立3个典型障碍物的边界模型。
球体表面模型为
 (10)
(10)
式中:Rc(xc, yc, zc)为雷达球中心点坐标;(x, y, z)为威胁区边缘点坐标;rc为威胁半径。
圆锥侧表面模型
 (11)
(11)
式中:Rb(xb, yb, zb)为圆锥底面圆心坐标;(x, y, z)为威胁区边缘点坐标;rb为底面半径;hb为山丘威胁区的高度。
圆柱侧表面模型为
 (12)
(12)
式中:圆柱上下底面坐标分别为Rah(xa, ya, za+ha), Ra(xa, ya, za);(x, y, z)为威胁区侧面边缘点坐标;ha为火炮威胁区的高;ra为底面半径。
对于不规则三维凹体障碍, 如果直接利用势场法进行路径规划, 会导致很多路径消耗或者容易陷入局部最小, 造成规划失败。解决方法通常是将不规则凹体障碍做一个外接球完全包络, 并以外接球为新的障碍进行路径规划研究, 这样即可对凹体障碍进行处理并规划路径。
3.2.2 基于不同障碍模型最近点的斥力势场计算
人工势场法在计算斥力势场时, 只能计算以施力点为基本点的斥力。因此在对三维威胁模型的计算时, 需要对计算方法进行优化。本文在优化了威胁模型以降低路径损耗的基础上, 提出最近威胁点计算方法。在障碍或威胁区域边缘上选取距无人机当前位置最近的点, 以此来计算斥力势场。通过这种计算方法, 可以保证无人机在每一路径点上都不会与障碍碰撞或进入威胁区, 并降低了规划路径损耗。
无人机当前位置Xj的坐标向量为(xj, yj, zj), 基于不同障碍威胁的最近点算法如下:
1) 基于球体障碍威胁的最近点计算。
假设距球体障碍的最近点Xnc为, 以Xj与Xc之差为法向量切平面与威胁球的切点, 则
 (13)
(13)
式中:Rc=(xc, yc, zc)为球体障碍的球心;rc为球体半径。
2) 基于圆锥障碍威胁的最近点计算。
当zj < hb时, 圆锥侧表面的切平面为α, 过点Xj且垂直于α的空间向量与α的交点, 即为最近点Xnb, 计算如下
 (14)
(14)
式中:Rj=(xb, yb, zj), 表示与无人机当前路径点同一高度下的圆锥威胁水平切面圆的圆心; rnb为以Rnb(xb, yb, znb)为底面圆心的圆锥半径
 (15)
(15)
 (16)
(16)
式中:β=arctan(rnb/hb), 表示圆锥威胁过顶点的竖直切面下的平面三角形的半顶角角度; ρ(Xj, Rj)为两点间的Euclidean距离; hb为圆锥威胁的高度。
当zj≥hb时, 最近点Xnb=(xb, yb, hb), 即为圆锥威胁的顶点。
3) 基于圆柱障碍威胁的最近点计算
当zj < hc时, 求Xj与威胁边缘最近点的问题可以进行降维, 即求与Xj在同一高度的平面坐标系下的圆上最近点Xna。设Rai=(xa, ba, zj), 表示与无人机当前点同一高度下圆的半径, 则
 (17)
(17)
当zj≥hc时, 取Rai=Rah用(17)式计算最近点。其中, Rah为圆柱上表面圆的圆心。
3.3 处理局部最小问题
采用人工势场法进行路径规划时, 会将合势场的全局极小点设计为目标点, 无人机会沿着合势场下降方向到达目标点。但是, 由于无人机不能掌握全局信息, 在复杂环境中也会存在除目标点以外的局部势场极小点, 无人机会误入势场的局部极小点, 导致路径规划失败。当无人机在局部最小点时, 所受合力趋近于零, 如果设定子目标点来改变引力势场, 此时无人机所受合力不为零, 便会跳出局部最小点。
据此, 受启发式算法的启发, 本文提出了一种设定启发式子目标点, 来选择最佳子目标点, 以跳出局部最小陷阱的方法, 该方法包括4个步骤:①判定无人机是否陷入局部最小陷阱; ②若陷入, 根据无人机约束条件设定子目标点选取范围; ③设定启发函数, 并利用函数选择最小代价的子目标点作为引力势场的产生点; ④到达子目标点后, 更改目标点为最终目标点。主要过程和算法详述如下。
在无人机陷入局部最小点后, 会在该点附近震动, 未陷入局部最小之前, 无人机一直向低势能方向飞行, 势能越来越小。陷入后会出现合势能震荡, 为此可以设置陷入局部最小的判定条件为
 (18)
(18)
式中, Uall为这一时刻的合势能, Uall(t+Δt)为下一时刻的合势能。当陷入局部最小陷阱时, 下一时刻的势能会大于当前时刻势能, 因此设定ε≥0, 其越小, 判定越灵敏。如果判定(18)式成立, 将进行通过算法进行逃逸处理。考虑到无人机的飞行约束限制, 本文将ε设定为零。
在检测到无人机陷入局部最小后, 以当前路径点Xj为球心, 以rmin为半径建立一个部分虚拟球面Rt, 如图 1所示, 其中
 (19)
(19)
式中, Xi为每一个构成局部最小区域的障碍威胁的最高点, 或者二维平面下障碍投影的边界点。
由无人机的约束条件决定虚拟球体的范围, 该球体的范围分别由无人机的最大转向角φm和最大爬升/俯冲角μm确定。在水平面内, 范围角φt选择为φ-φm≤φt≤φ+φm; 在垂直平面内, 范围角μt选择为-μm≤μt≤μm。
若无人机在Xj路径点时所受合力为F=(fx, fy, fz), 则
 (20)
(20)
确定范围的部分球面Rt如图 1所示, 将Rt离散为均匀分布的n0个点, 在这些点中选取适合的子目标点, 并利用上文建立的障碍物模型, 检测出在构成局部最小陷阱的所有障碍外部的点, 共n个。判定方法为:将n0个点分别代入3种障碍威胁模型方程中, 选取符合与每个模型对应的圆心距离都大于障碍威胁半径的子目标点群为{G1, G2, …Gn}。图 1中ω1为XjGi与XjG0的夹角, ω2为XjGi与GiG0的夹角。则Δω=|ω2-ω1|, 表示取Gi为子目标点的角度代价。最终目标点为G0。
定义启发函数为
 (21)
(21)
式中:ξ1和ξ2为代价函数权重;D为子目标与最终目标相对距离的代价函数, 设定原因为降低路径损耗;A为角度转换代价函数, 设定原因为平滑路径, 避免无人机转弯角过大;Gi为点群里任一点。其中
 (22)
(22)
 (23)
(23)
于是可通过启发函数选取最佳子目标点Gi
 (24)
(24)
在无人机到达子目标点后, 改变目标点为最终目标, 无人机会朝最终目标点飞行。
 |
图1 确定启发式子目标示意图 |
3.4 局部路径震荡及其处理方法
在运用势场法进行路径规划时, 规划的路径有时会出现局部路径震荡现象, 如图 2所示。产生这种现象的主要原因是, 无人机在当前路径点的引力占据主导地位, 规划的路径方向会趋向目标点; 但是在下一路径点时, 由于靠近障碍物, 斥力有可能占据主导地位, 规划的路径方向会趋向背离目标点。两种情况循环, 就会导致规划的路径出现震荡。
关于局部路径震荡的处理, 有时会利用无人机飞行约束或者一些轨迹平滑优化方法。如通过对无人机最大转弯角进行约束来改善震荡问题, 但碰到相邻航点间震荡幅度很大时, 无人机在飞行时会反复以最大转弯角来回转向, 震荡仍会存在, 也会造成一定的安全隐患, 所以对无人机飞行角的约束只适用于一些震荡幅度较小的情况。利用一些轨迹优化方法改善震荡时, 很多优化方法需要获得震荡路径后进行二次计算从而平滑轨迹, 这样就不符合在线局部路径规划的要求。
针对上述问题, 本文提出一种加入记忆性合力来动态改善局部路径震荡的策略, 这种策略在相邻航点的合力方向发生显著变化时仍然能抑制震荡, 并且在下一步路径规划完成之前直接在线改善震荡。
无人机在计算出飞往下一路径点Xj+1的合力方向后, 仍然保留计算飞往路径点Xj时的合力方向, 并将2个路径点上的合力融合, 从而降低合力角度变化量, 在进行每一航点飞行时在线改善局部震荡。将上述策略用数学表达式表示如下
 (25)
(25)
 (26)
(26)
 (27)
(27)
式中:vΔt为无人机在相邻路径点飞过的路径长度;Fj与Fj+1分别为第j与第j+1个路径点上由势场法计算出的合力;‖·‖为表示向量的Euclidean范数;λ1与λ2为合力的记忆因子权重, 取值原则依赖于路径点j与路径点j+1的合力角度变化大小, 也就是震荡的幅度大小。如果合力角度变化较小, 则调整λ1≤λ2; 变化较大则λ1>λ2。具体调整可参照(27)式。这样, 通过加入记忆合力的方法, 可以有效地改善局部路径震荡问题。
 |
图2 局部路径震荡示意图 |
4 仿真验证与分析
本节针对上述改进人工势场法进行仿真验证。首先, 验证基于不同障碍威胁的势场计算方法的可行性。其次, 对改进势场函数处理目标不可达问题进行了仿真验证。之后, 对启发式子目标点摆脱局部最小的方法进行了仿真验证, 并与传统方法在局部最小陷阱的表现进行比较。之后对记忆性合力改善局部路径震荡的方法进行仿真, 并与传统方法进行比较。
4.1 改进斥力函数的仿真验证
仿真中首先加入改进斥力函数来解决目标不可达问题, 将传统人工势场与改进势场对目标附近存在障碍物的路径规划情况进行对比。
为了验证算法有效性, 保证传统算法能够获得最优性能, 对传统算法采用最佳参数进行仿真。设定传统算法势场参数为katt=13, krep=25;改进算法势场参数为katt=8, krep=30。ρo=2 km, l=0.2 km。改进势场的调节因子n=0.7。
由仿真数据得到最后一个路径点对应的斥力势场产生点为(10.657 6, 11.618 6, 8.973 4)km。该点与目标点相对距离为1.054 1 km, 小于障碍影响距离, 因此在目标点附近存在障碍威胁。
图 3为2种算法规划路径对比。由图 3可以看出改进势场法到达目标点, 传统势场法存在目标不可达问题。图 4分别记录了2种算法中, 无人机不同路径点与目标点的相对距离。可以看出, 传统人工势场法在目标附近存在障碍威胁时, 会在目标点附近震荡抖动, 不能到达目标点; 而改进势场法可以到达目标点; 这表明改进算法可以解决目标不可达的问题。
 |
图3 传统势场法与改进算法目标不可达问题对比 |
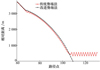 |
图4 2种算法路径点与目标点的相对距离对比 |
4.2 基于不同障碍物模型的势场计算方法仿真验证
本文在第二部分给出了不同障碍威胁的模型, 并提出了一种基于不同障碍模型的势场计算方法, 本小节对其进行仿真验证。图 5至7分别为无人机在遇到半球体雷达威胁模型或球体障碍、圆锥山丘模型、圆柱高炮威胁模型的飞行路径仿真实验。仿真中选用改进斥力势场函数, 并加入合理记忆因子的势场模型。仿真设定参数为:katt=8, krep=20, n=0.7, ρo=2 km, λ1=0.7, λ2=0.3, l=0.2 km。
图 6终点为(13, 13, 8)km; 障碍威胁的球心坐标分别为(6, 4, 0)km和(10, 10, 8)km, 半径分别为3.5 km和2 km。图 7中终点为(11, 11, 7)km, 底面圆心坐标分别为(7, 8, 0)km和(3, 3, 0)km, 半径为4 km和1 km, 高为8 km和1.5 km。图 8终点为(12, 12, 8)km, 底面圆心坐标分别为(8, 6, 0)km和(4, 4, 0)km, 半径为2 km和1 km, 高为7 km和1 km。起点均为(0, 0, 0)km。
由仿真结果可看出, 对于不同障碍威胁模型, 通过最近威胁点计算方法计算规划路径, 无人机可以有效规避障碍威胁到达目标点; 对于圆锥山丘障碍与高炮圆柱威胁均可以从侧面与顶部规避, 从而验证了算法有效性; 规划路径平滑, 适合无人机飞行。
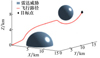 |
图5 半球雷达威胁及球体障碍飞行路径 |
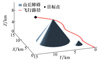 |
图6 山丘等锥体障碍飞行路径 |
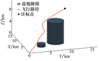 |
图7 高炮等圆柱障碍威胁飞行路径 |
 |
图8 陷入局部最小点并未逃脱 |
4.3 启发式子目标跳出局部最小的仿真验证
本文针对传统人工势场法容易陷入局部最小点的问题, 提出了设定启发式目标点来跳出局部最小的算法。仿真中将未加入启发式子目标的算法与加入启发式子母标的改进算法进行了对比。
仿真中设定势场参数为katt=8, krep=20, n=0.7, ρo=2 km, l=0.2 km。无人机起始点为(0, 0, 0)km, 最终目标点为(22, 22, 5)km。
为了充分验证算法的有效性, 在仿真中建立了5个不同障碍威胁的组合障碍, 5个障碍构成了局部最小区域, 如图 8和图 9所示。图 8为未引入启发式子目标点的改进算法仿真图, 图 9为加入启发式子目标点的改进算法仿真图。
由图 8以及仿真结果可看出, 在无人机到达路径点(13.993 0, 14.599 0, 4.757 8)km时, 陷入局部最小值, 并且在其附近来回震荡, 不能从中逃脱。而图 9中, 在无人机陷入局部最小区域后, 由于启发式子目标点的引导, 成功逃离, 并最终飞向目标点。选择子目标点虚拟球面半径为3.137 0 km, 启发式子目标点坐标为(13.116 1, 17.590 8, 4.943 5)km。
根据图 8与图 9及仿真数据可以得出, 在加入启发式子目标点后, 无人机能够跳出局部最小值区域, 解决了传统势场模型以及本文改进势场模型的易陷入局部最小问题。
 |
图9 陷入局部最小点并逃脱 |
4.4 合力记忆改善局部震荡的仿真验证
本文针对改进势场在规避障碍、进行路径规划时易产生局部路径震荡的问题, 提出利用记忆性合力来改善此类问题, 仿真中通过与未加入记忆合力的改进势场模型进行对比, 验证合力记忆改善局部震荡的效果。
仿真中, 设定势场仿真参数为, katt=8, krep=20, n=0.7, ρo=2 km, l=0.2 km。在加入记忆因子的改进势场模型中, 记忆因子的取值设定为λ1=0.7, λ2=0.3。图 10和图 11对2种算法进行了飞行路径仿真。图 12为2种算法在出现局部震荡后, 相邻路径点之间的合力角度变化量, 由于合力方向引导无人机的飞行路径方向, 因此决定着相邻路径点间的震荡幅度。
由图 10和图 11可以看出,在加入了记忆合力后,无人机飞行路径有了明显改善,不会出现局部路径震荡的情况。由图 12也可以看出,在加入记忆合力以后,无人机相邻路径点间的合力角度变化量明显变小,不会出现大幅度的角度震荡。这表明该方法的引入满足了无人机的飞行约束条件,不会出现相邻路径点之间的大幅度角度变化,使飞行路径更平滑,适合无人机的路径规划。
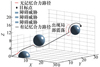 |
图10 局部震荡路径原图 |
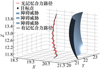 |
图11 局部震荡路径放大图 |
 |
图12 相邻路径点之间合力角度变化量 |
5 结论
为了处理无人机三维在线路径规划的问题,本文提出了一种适合于无人机的改进三维在线人工势场算法。首先,针对无人机的飞行环境,对飞行中的3种障碍威胁建立模型,并根据人工势场法对障碍产生的斥力特性与模型特性,提出了不同障碍威胁的斥力最近点计算方法。然后,针对传统人工势场法的3个缺陷,分别进行了算法改进:针对目标不可达问题,引入改进斥力势场;针对局部最小问题,提出启发式子目标点算法来跳出;针对局部路径震荡问题,提出记忆性合力改善路径震荡。
理论分析和仿真结果对比表明,本文方法该能够有效地处理传统人工势场法带来的目标不可达问题、局部最小问题和局部路径震荡问题;这3个问题的解决提高了飞行安全性,降低了由于局部震荡导致的路径消耗,使路径更平滑。
在复杂环境中需要采用全局路径规划与局部规划相结合的方法,这是复杂环境中路径规划问题研究的重点,也是本文后续的研究方向。
References
- Li Xiangmin, Bo Ning, Dai Jinjin. Study on Collision Avoidance Path Planning for Multi-UAVs Based on Model Predictive Control[J]. Journal of Northwestern Polytechnical University, 2017, 35(3), 513–522 [Article] (in Chinese) [Google Scholar]
- Xu Zhao, Hu Jinwen, Ma Yunhong, et al. A Study on Path Planning Algorithms of UAV Collision Avoidance[J]. Journal of Northwestern Polytechnical University, 2019, 37(1): 107–113 [Article] (in Chinese) [CrossRef] [Google Scholar]
- Suh J, Gong J, Oh S. Fast Sampling-Based Cost-Aware Path Planning with Nonmyopic Extensions Using Cross Entropy[J]. IEEE Trans on Robotics, 2017, 33(6): 1313–1326 [Article] [CrossRef] [Google Scholar]
- Cekmez U, Ozsiginan M, Sahingoz O K. Multi Colony Ant Optimization for UAV Path Planning with Obstacle Avoidance[C]//2016 International Conference on Unmanned Aircraft Systems, 2016 [Google Scholar]
- Khansari-Zadeh S M, Billard A. A Dynamical System Approach to Realtime Obstacle Avoidance[J]. Autonomous Robots, 2012, 32(4): 433–454 [Article] [CrossRef] [Google Scholar]
- Yan F, Liu Y S, Xiao J Z. Path Planning in Complex 3D Environments Using a Probabilistic Roadmap Method[J]. International Journal of Automation and Computing, 2013(6): 41–49 [Article] (in Chinese) [Google Scholar]
- Arantes J D S, Márcio Da Silva Arantes, Toledo C F M, et al. Heuristic and Genetic Algorithm Approaches for UAV Path Planning under Critical Situation[J]. International Journal of Artificial Intelligence Tools, 2017, 26(1): 1760008 [Article] [CrossRef] [Google Scholar]
-
Lee J, Kwon O, Zhang L, et al. A Selective Retraction-Based RRT Planner for Various Environments[J]. IEEE Trans on Robotics, 2014, 30(4): 1002–1011 10.1109/TRO.2014.2309836
LEE J, KWON O, ZHANG L, et al. A Selective Retraction-Based RRT Planner for Various Environments[J]. IEEE Trans on Robotics, 2014, 30(4):1002-1011
[CrossRef] [Google Scholar] - Gao Xiaoguang, Li Qingyuan, Di Ruohai. MPC Three-Dimensional Dynamic Path Planning for UAV Based on DBN Threat Assessment[J]. Systems Engineering and Electronics, 2014, 36(11): 2200–2205 [Article] (in Chinese) [Google Scholar]
- Mattei M, Blasi L. Smooth Flight Trajectory Planning in the Presence of No-Fly Zones and Obstacles[J]. Guidance Control Dyn, 2010, 33(2): 454–462 [Article] [CrossRef] [Google Scholar]
- Yao P, Wang H L, Liu C. 3-D Dynamic Path Planning for UAV Based on Interfered Fluid Flow[C]//Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference, 2014: 997–1002 [Google Scholar]
- Khatib O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots[J]. International Journal of Robotics Research, 1986, 5(1): 90–98 [CrossRef] [Google Scholar]
- Xiong Chao, Xie Wujie, Dong Wenhan. Obstacle Avoidance Path Planning for UAV Based on Artificial Potential Field Improved by Collision Cone[J]. Computer Engineering, 2018(9): 314–320 [Article] (in Chinese) [Google Scholar]
- Luo Guahen, Yu Jianjiao, Mei Yuesong, et al. UAV Path Planning in Mixed-Obstacle Environment via Artificial Potential Field Method Improved by Additional Control Force[J]. Asian Journal of Control, 2014, 17(5): 1600–1610 [Google Scholar]
- Huang Y, Hu H, Liu X. Obstacles Avoidance of Artificial Potential Field Method with Memory Function in Complex Environment[C]//Intelligent Control & Automation, 2010: 6414–6418 [Google Scholar]
- Sun J, Tang J, Lao S. Collision Avoidance for Cooperative UAVs with Optimized Artificial Potential Field Algorithm[J]. IEEE Access, 2017, 5: 18382–18390 [Article] [CrossRef] [Google Scholar]
- Jia Zhengrong, Wang Hangyu, Lu Faxing. Improved Circulating APF Route Planning Based on Obstacle Convexification[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(10): 254–268 [Article] (in Chinese) [Google Scholar]
- Ding Mingyue, Zheng Changwen, Zhou Chengping, et al.Route Planning for Unmanned Aerial Vehicles[M]. Beijing: Publishing House of Electronics Industry, 2009: 41–43 [Google Scholar]
All Figures
|
图1 确定启发式子目标示意图 |
| In the text | |
|
图2 局部路径震荡示意图 |
| In the text | |
|
图3 传统势场法与改进算法目标不可达问题对比 |
| In the text | |
|
图4 2种算法路径点与目标点的相对距离对比 |
| In the text | |
|
图5 半球雷达威胁及球体障碍飞行路径 |
| In the text | |
|
图6 山丘等锥体障碍飞行路径 |
| In the text | |
|
图7 高炮等圆柱障碍威胁飞行路径 |
| In the text | |
|
图8 陷入局部最小点并未逃脱 |
| In the text | |
|
图9 陷入局部最小点并逃脱 |
| In the text | |
|
图10 局部震荡路径原图 |
| In the text | |
|
图11 局部震荡路径放大图 |
| In the text | |
|
图12 相邻路径点之间合力角度变化量 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.