| Issue |
JNWPU
Volume 40, Number 2, April 2022
|
|
|---|---|---|
| Page(s) | 422 - 432 | |
| DOI | https://doi.org/10.1051/jnwpu/20224020422 | |
| Published online | 03 June 2022 | |
Tensor coaxial calibration of magnetic sensor array
磁强计阵列测量一致性校正
1
College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China
2
CSIC 715th Marine Institute, Hangzhou 310012, China
Received:
29
June
2021
Abstract
In order to effectively solve the influence of the magnetic sensor array error caused by axial inconsistency on the measurement accuracy, an array composed of four fluxgate sensors is built by using the Euler rotation matrix, and the consistency correction is carried out. Firstly, aiming at the non orthogonal, scale factor, zero bias and other error factors of the sensor itself, a 9-PARAMETER correction coefficient matrix is constructed to compensate the non orthogonal magnetic field measurement of the sensor, and the ideal orthogonal three component magnetic field measurement value is obtained. On the above-mentioned basis, the reference sensor in the magnetometry array is selected, and the roll, pitch and azimuth of the sensor to be calibrated are transformed to establish the Euler rotation matrix, and the model for 9-PARAMETER consistency correction is constructed. The reference sensor and the sensor to be calibrated are placed on the magnetic gradiometer for experimental verification. The experimental results show that the root mean square error of magnetic field measurement is within 10 nT after the sensor measurement error compensation correction, and the angle error of each axis measurement is within 0.01åfter the consistency correction (4.22 nT). It shows that the magnetic field measurement values of different measuring points in the sensor array can be well projected on the coordinate axis of the reference sensor after correction, and the magnetic field information of the measuring points can be correctly projected, which has high reliability.
摘要
为了有效解决磁强计阵列由于轴向不一致引起的误差对测量精度造成的影响,搭建由4个磁通门磁强计构成的阵列,利用欧拉旋转矩阵对其进行一致性校正。针对磁强计自身存在的非正交、刻度因子、零偏等误差影响因素,构建九参数校正系数矩阵对磁强计的磁场测量进行非正交补偿校正,得到理想正交的三分量磁场测量值。在此基础上选定测磁阵列中的参考磁强计,对待校正磁强计进行横倾、俯仰、方位3种姿态变换建立欧拉旋转矩阵,构建九参数一致性校正模型。并把参考磁强计与待校正磁强计置于无磁转台上进行实验验证。实验结果表明,经过磁强计测量误差补偿校正后,磁场测量均方根误差在10 nT以内,经过一致性校正后,各轴测量角度误差在0.01°(4.22 nT)以下。说明经过校正后磁强计阵列中不同测量点的磁强计磁场测量值可以很好地投影到基准磁强计的坐标轴上,并且可以正确放映测量点的磁场信息,具有很高的可靠性。
Key words: magnetic sensor array / consistency correction / euler rotation matrix / non orthogonal compensation correction
关键字 : 磁强计阵列 / 一致性校正 / 欧拉旋转矩阵 / 非正交补偿校正
© 2022 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
磁强计自身具有一定的物理局限性,在许多较大的工程应用场景中单个磁强计并不能满足测量要求1],尤其在需要大平面阵列进行测量的情况中,单个磁强计受到技术原理以及加工工艺水平限制,短期内并不能依托于提高性能实现工程要求2-5],因此对磁强计阵列技术的准确性研究尤为重要。磁强计阵列技术指的是在待测磁场空间或者待测磁源周围布放多个磁强计,同时进行磁场测量6]。影响阵列系统测量准确性的主要原因有磁强计自身的非正交、刻度因子、零偏等系统误差因素7-8],以及在磁强计阵列的搭建安装过程中由于安装工艺水平的限制,使各磁强计之间轴向姿态不一致引起的旋转误差因素。
研究表明,当磁强计的坐标轴有1°偏差时,测量误差将达到0.87%9-10]。目前,针对磁强计阵列校正的研究较少,朱兴乐11]采用DE算法对磁强计的水平误差角进行校正,但是该校正方法的前提是各磁强计垂直分量轴需保持一致,属于二维平面校正。磁强计三维校正方法可借鉴磁梯度仪的误差校正,现有磁梯度仪的非对准误差的主要解决方法有2种:①基于机械结构的磁强计姿态调整;②通过软件的手段进行校正。基于机械结构的非对准误差校正方法不仅对机械结构要求高,且阵列中磁强计数量较多时,校正不易实现。关于软件校对方法,于振涛等对梯度仪系统误差采用两步法进行补偿校准,张光等对张量系统进行线性化校准,具有一定的校正效果,但是两者均忽略了实际测量输出的高阶小量,影响了测量精度12-15]。
本文提出了一种针对磁强计阵列的一致性校正模型,在不忽略高阶小量的基础上构建九参数磁通门磁强计系统误差校正模型,对构成测磁阵列的磁强计的非正交、刻度因子、零偏误差进行校正得到理想正交三分量磁场测量值。在此基础上,以阵列中一个磁强计的轴向为参考,构建三维九参数欧拉旋转矩阵校正模型,对其他磁强计进行俯仰、横倾、方位3种姿态转换,实现了对磁强计阵列的轴向一致性校正。
1 磁通门磁强计系统误差校正
磁通门磁强计阵列校正是对磁强计之间坐标轴的一致性进行校正,单个磁通门磁强计的测量精度直接影响了磁强计阵列的测量精度16-18]。为了保证阵列一致性校正的精确性首先需要对磁强计的系统误差进行校正,保证每个磁强计均是理想正交磁强计。
建立磁场测量实际空间坐标O-X1Y1Z1与理想坐标O-XYZ,如图 1所示。设磁场空间坐标系的原点与理想坐标系的原点重合, 再令实际坐标系垂向轴OZ1与理想坐标系的垂向轴OZ同轴, Z1OY1与ZOY共面。设OY与OY1之间的夹角为ψ, OX1与XOY的夹角为φ; OX1在XOY面上的投影与OX的夹角为θ。
三轴磁通门的测量误差来源主要有非正交误差、零位误差及刻度因子误差,这些误差的具体表达式如下所示:
1) 非正交误差
在不考虑其他误差的情况下对图 1进行矢量分解, 得到实际测量磁场值B1与理想测量磁场值B之间的关系为
 1
1
2) 刻度因子误差
刻度因子误差是不同通道的采集电路无法做到完全一致导致的, 设刻度因子误差矩阵为K, 表示为
 2
2
3) 零偏误差
零偏误差是由磁强计内部剩磁引起的, 表达式为
 3
3
综上, 可构建实际输出B1与理想输出B之间的关系为
 4
4
对(4)式进行转换, 可将三轴磁通门磁强计存在误差干扰时测量得到的校正值当做测量磁场的真实值, 得到输出校正值为
 5
5
令

磁强计的误差参数校正模型为
 6
6
利用最小二乘法可对kx, ky, kz, θ, φ, ψ, bx, by, bz进行求解, 则可完成对磁强计测量值的补偿校正。
 |
图1 磁通门三轴示意图 |
2 测磁阵列一致性校正
匀强静磁场环境中, 测磁阵列中的各磁强计经过系统误差校正后, 不同位置上的磁强计测量输出值均收敛于环境磁场值。由于安装具有一定偏差, 经过校正后的磁强计各理想正交轴朝向错乱, 导致不同位置上的磁强计存在旋转非对准误差。如图 2所示, 本文选定测磁阵列中磁强计1的坐标轴作为参考坐标系, 将测磁系统中的其他磁强计转化到磁强计1的坐标轴下。
三维一致性校正在空间上进行, 空间中任意2个正交坐标系可通过包含3个非对准角度的旋转矩阵进行转换。在均匀场环境中, 将一个坐标轴转换到参考坐标系中, 虽然有不同的旋转方法, 但是旋转后得到的磁场测量值是固定的, 故通过建立欧拉旋转矩阵可对磁强计进行一致性校正。
 |
图2 磁强计阵列布放模拟 |
2.1 横倾转换模型
本文分别从x, y, z 3个坐标系建立转换模型, 对测磁阵列进行一致性校正。设待校正磁强计的实际坐标轴为O-X2Y2Z2, 实际磁场测量值为(Bx, By, Bz), 本文采用模拟旋转磁强计坐标轴的方法, 对磁强计进行一致性校正。建立横倾正交转换模型, 如图 3所示, 令待校正磁强计与基准磁强计的x轴重合, 再绕x轴旋转, 使By与XOY共面。
式中:λ为横倾旋转角, 横倾变化后磁场值为Bxλ, Byλ, Bzλ, 变换前后的磁场关系式为
 7
7
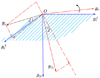 |
图3 横倾转换模型 |
2.2 俯仰转换模型
横倾转换后磁场测量值为Bxλ, Byλ, Bzλ, 在此基础上做俯仰转换, 即绕y轴进行旋转, 令Bzλ与z轴重合。由正交关系可知, 此时Bxλ 与XOY共面, 建立模型如图 4所示。
俯仰转换完成后, z轴已经达到理想位置, 此时, 待校正磁强计的XOY平面与标准磁强计的XOY平面共面。θ为俯仰旋转角, 俯仰变化后磁场值为Bxθ, Byθ, Bzϑ, 变换前后的磁场关系式为
 8
8
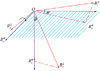 |
图4 俯仰转换模型 |
2.3 方位转换模型
横倾俯仰转换后磁场测量值为Bxθ, Byθ, Bzθ, 在此基础上做方位转换, 即绕z轴进行旋转。在俯仰转换中, 待校正坐标轴与参考坐标轴的XOY平面共面且z轴重合。因此, 在方位转换中只用将待校正坐标轴绕z轴旋转使得Bxθ与x轴重合, 便可将待校正坐标系完全转换到参考坐标系中, 建立模型如图 5所示。
其中,δ为方位旋转角度, 俯仰变化后磁场值为Bxδ, Byδ, Bzδ, 则俯仰变换前后的磁场关系式为
 9
9
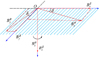 |
图5 方位转换模型 |
2.4 三维一致性转换模型
磁强计安装完毕后的角度固定, 因此旋转角度λ, θ, δ为固定值, 不会随着时间变化。磁强计三轴变换的欧拉旋转矩阵表达式为
 10
10
式中: Tλ为待校正磁强计的横倾旋转矩阵; Tθ为待校正磁强计的俯仰旋转矩阵; Tδ为待校正磁强计的俯仰旋转矩阵。综合上述3次旋转变换, 空间上任意姿态的2个正交坐标系, 都可以通过横倾、俯仰、方位的三维变换转化到同一坐标系下。由(10)式可以看出, 矩阵的乘积顺序与绕轴旋转的顺序相匹配, 本文采取横倾、俯仰、方位的旋转顺序进行一致性校正, 待校正磁强计与参考磁强计的转换关系表示为
 11
11
式中:T为待校正磁强计在任意姿态下按照横倾、俯仰、方位的顺序依次进行旋转校正的旋转矩阵。根据此正交转换关系, 用Biλθδ 表示待校正磁强计的i轴(i=x, y, z)进行了横倾、俯仰、方位的三维变换。得到磁强计进行一致性校正后的磁场值Bxλθδ, Byλθδ, Bzλθδ与实际坐标轴下的磁场测量值Bx, By, Bz的关系如(12)式所示。
 12
12
向量形式的表达方式如(13)式所示。
 13
13
式中:λ, θ, δ为设定的3个旋转角度;M1×3为待校正磁强计进行一致性校正前的姿态输出向量;Vx3×1, Vy3×1, Vz3×1分别表示一致性校正的旋转输出向量。
(12) 式可以看出, 每一种旋转次序对应一种旋转矩阵, λ, θ, δ互相匹配。将(13)式用增广矩阵表示成3个线性方程组
 14
14
式中:BxN×1, ByN×1, BzN×1为待校正磁强计的合成磁场总值在标准坐标系下的三分量磁场值, 包含每个磁强计N种姿态下理想正交磁强计经过一致性校正后的三分量测量数据, 为已知矩阵。任意2个理想正交磁强计在固定的旋转顺序下有且仅有一组校正值, 而(14)式是含有3个未知量的超定方程, 采用最小二乘法进行匹配估计求解, 最小二乘法的求解方程组为
 15
15
由(11)式可以看出, 每一次旋转校正是在上一次旋转的基础上进行的, 当旋转顺序固定时, 可计算出一致性校正的唯一角度, 联立方程(12)~(15)可以求解得到待校正磁强计的非对准误差唯一角度, 此时磁强计阵列的非线性误差校正完成。
3 仿真分析
3.1 磁通门磁强计校正仿真分析
利用MATLAB对上述校正方法进行性能分析, 设待校正磁强计所处的环境磁场大小为48 750 nT。为了得到单个磁通门磁强计的校正参数, 需要得到磁强计在空间上任意方位的磁场测量数据。把磁强计阵列中的每个磁强计置于如图 6所示的三维旋转台上, 从初始位置开始绕三维空间轴进行旋转, 进而获得全空间方位上的磁场测量矢量, 在x轴方向上进行以60°为采样间隔的旋转, y轴方向上进行以90°为采样间隔的旋转, z轴方向上进行以60°为采样间隔的旋转, 并记录数据。
为了方便观察, 对磁场测量数据进行插值, 图 7中红色圆点为补偿前的实测点, 蓝色点为插值拟合点。
由图 7可以看出, 在未对磁强计进行补偿校正的前提下, 磁强计的实际空间输出为椭球形磁场, 通过对方程(6)的求解, 得到每个磁强计校正的参数矩阵, 把校正参数代入到实际测量结果中, 得到磁强计的理想测量值。
对4个磁通门磁强计分别进行仿真校正, 计算4个磁强计的误差矩阵, 分别为磁强计系统误差矩阵M, 以及零偏噪声误差矩阵b计算结果如表 1所示。
把表 1中的校正参数系数矩阵代入到磁强计的测量结果中, 利用最小二乘法对磁场测量数据进行后处理, 对阵列中所有磁强计的测量误差进行补偿, 消除单个磁强计的椭球化影响。补偿校正后的磁强计矢量三维空间磁场测量结果如图 8所示, 图中蓝色球体是以空间磁场圆点为圆心, 背景磁场为半径的理想球体, 橙色点为补偿后的磁场测量值。
由图 8可以看出, 对磁强计进行校正之后, 测量值均落在了理想球面上, 磁场测量椭球化得到了很好消除。通过第一节中的校正方法对阵列中的磁通门磁强计测量结果进行校正, 反映到阵列磁场测量总场值中的校正效果如图 9所示。结果表明, 进行非正交补偿后的磁场测量值收敛于空间磁场值, 达到了理想效果。
利用磁强计校正前后的输出相对方差值对磁场测量校正效果进行表征, 以此来定量反映磁强计的系统误差以及非正交误差的校正效果。由于地磁环境时刻变化, 因此磁强计进行测量时总会存在波动, 为了更明显地展示校正效果, 本文利用每次磁场测量最大值进行精度表征, 输出相对方差值计算公式为
 16
16
式中:N为测量姿态数;|Bi|max为第i个磁强计最大测量绝对值;Br为磁场测量标准值。
校正前后每个磁强计的相对方差误差对比结果列于表 2。由实验结果可以看出, 磁强计校正前的相对方差误差在百级以上, 校正后磁强计的均方根误差在10 nT以内, 校正效果明显。
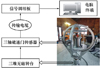 |
图6 三维转台 |
 |
图7 空间磁场测量值三维示意图 |
磁强计补偿校正系数矩阵
 |
图8 空间磁场校正结果三维示意图 |
 |
图9 磁场总场值校正结果 |
测量相对方差值
3.2 磁强计阵列一致性校正仿真分析
对磁强计测量结果进行校正是对磁强计阵列进行一致性校正的前提, 在对磁强计测量结果校正的基础上, 对磁强计阵列进行一致性校正。当磁强计阵列位于匀强磁场的环境中时, 磁强计阵列中每个磁强计的磁场测量轨迹应该重合, 利用上述磁强计姿态校正方法对各磁强计进行校正, 将1号磁强计作为参考对其他磁强计依次进行一致性校正, 计算得到各磁强计的一致性校正系数如表 3所示。
将表 3中的一致性校正系数代入每个磁强计的磁场测量结果中, 得到各个磁强计相对误差校正结果如图 10所示。
由仿真结果可以看出, 本文提出的磁强计阵列一致性校正方法可以有效补偿磁强计阵列输出, 补偿后磁强计阵列磁场测量输出误差小于±20 nT, 校正效果良好。
一致性校正系数
 |
图10 补偿校正前后磁场测量结果对比 |
4 实验结果分析
把参考磁强计与待校正磁强计置于转台上进行实验验证, 保证各磁强计到转台中心位置的距离相同, 使测磁系统绕磁中心旋转一周。本文主要针对由4个磁强计构成的磁强计阵列进行一致性校正, 搭建一致性校正实验平台如图 11所示, 由于实验条件有限, 将磁强计两两一组置于无磁转台上, 通过无磁转台改变测磁系统姿态。磁强计间距离为0.5 m, 工作温度范围是-40~70℃, 环境温度为12℃。实验在外界磁场稳定且干扰较小的环境中进行, 根据世界地磁模型WMM2020查询得知, 实验地点的地磁场总量Br约为48 500 nT, 以此作为磁强计阵列测量的标准磁场输出值。
令无磁转台绕z轴进行旋转, 以此改变磁强计的空间姿态, 保持磁强计的初始姿态水平, 此时x轴与y轴的旋转角度均为0°, 转台每转10°记录1次磁场测量值, 共旋转1周, 每个磁强计有36组姿态数据, 该磁强计阵列共有4×36组姿态数据。
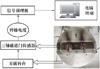 |
图11 无磁转台 |
4.1 磁通门磁强计非正交补偿实验结果分析
以Br作为参考输出值, 利用上述方法对磁强计阵列中的4个磁强计进行校正, 得到磁强计的测量输出校正结果如图 12所示。用各个磁强计的测量输出标准差表征磁强计的补偿校正性能, 校正结果如表 4所示。
由图 12中对磁强计补偿校正的实验结果可知, 经过补偿校正后磁强计的磁场测量输出值稳定在48 500 nT左右, 与标准输出值拟合程度较高。由表 4可知, 经过补偿校正后的各磁强计测量输出的误差均方根值在10 nT以内, 磁强计的输出达到了较高的精度。
 |
图12 测量输出校正结果 |
测量输出标准差
4.2 磁强计阵列一致性校正结果分析
以磁强计阵列中选定的磁强计坐标轴为参考, 对待校正磁强计进行一致性校正, 采用最小二乘法进行匹配估计求解, 收敛速度如图 13所示, 可以看出该方法收敛速度快, 计算精度高。
图 14以磁场值的三维形式直观地显示了校正结果。当各磁强计坐标轴之间具有较高的一致性时, 在三维图中表现为磁场测量结果重合度较高。其中图 14a)为三维转台上实际磁场测量值, 图 14b)为对磁强计进行系统误差校正后的磁场测量值, 图 14c)为经过一致性校正后的磁场测量值。实验结果表明, 若对磁强计阵列只进行系统误差校正而不进行一致性校正时, 磁强计阵列测量不仅重合度未得到改善, 反而使非重合度增加, 进行一致性校正之后, 各个磁强计在均匀的磁场环境中测量得到的磁场值重合度达到了理想水平。
为了更精确地显示一致性校正效果, 表 5列出了一致性校正前后阵列中的各待校正磁强计与标准参考磁强计之间的角度差。一致性校正前待校正磁强计与参考磁强计各坐标轴之间的角度差在1°左右, 甚至高达2°, 这对弱磁测量结果会产生很大影响。由实验结果可以看出, 经过一致性校正之后各坐标轴之间的误差减小到了0.01°以下, 大大提高了磁强计阵列的测量精度。
 |
图13 计算精度 |
 |
图14 三维转台实验结果 |
待校正磁强计与标准参考磁强计的角度差
5 结论
与单个磁强计相比,磁强计阵列能够直接获得多个位置的磁场信息,同时获得不同位置的磁场变化规律,具有更高的可靠性。
随着磁强计阵列的广泛使用,本文针对其存在的姿态不一致问题进行了建模校正,首先针对磁通门磁强计构建了非正交、刻度因子系统误差校正模型。在不忽略高阶小量的情况下,得到九参数测量补偿校正系数矩阵。在对磁强计进行测量补偿校正的基础上,通过欧拉旋转矩阵搭建三维磁强计阵列一致性校正模型,分别进行俯仰、横倾、方位3种姿态变换。利用最小二乘法进行求解,收敛速度快,计算精度高。实验结果表明,经过磁强计系统误差校正后,磁场测量均方根误差在10 nT以内,有效降低了磁通门磁强计的测量误差。经过一致性校正后,各轴测量角度误差在0.01°以下,换算到磁场中为4.22 nT以下,说明经过校正后的磁强计阵列具有良好的一致性,有效解决了磁强计阵列姿态不一致导致的测量误差。
本文建立的磁强计阵列的校正模型为大平面测磁阵列的一致性校准提供了思路和方法,有利于提高磁强计阵列的测量精度。该模型对测磁阵列系统无特殊要求,误差校正模型基于单磁通门磁强计而建立,因此适用于任何由三轴磁通门磁强计或加速度计构成的阵列,具有很高的实用性。
References
- SUN Hao, ZHAO Wei. Technical characteristics and applications of magnetic sensor array[J]. Electrical Measurement & Instrumentation, 2020, 57(9): 1–7 (in Chinese) [Google Scholar]
- ZHANG C H D. Some problems concerning the magnetic anomaly detection(MAD)[J]. Chinese Journal of Engineering Geophysics, 2007(6): 549–553 [Google Scholar]
- LENZ J, EDELSTEIN S. Magnetic sensors and their applications[J]. IEEE Sensors Journal, 2006, 6(3): 631–649 [Article] [CrossRef] [Google Scholar]
- LIU Limin. Configuration design, error analysis and underwater target detection of fluxgate tensor magneto-meter[D]. Changchun: Jilin University, 2012: 24–34 (in Chinese) [Google Scholar]
- XIANG Qiong, YUE Changxi, HU Chen, et al. Hall effect element array based current measurement system[J]. Electrical Measurement & Instrumentation, 2017, 54(23): 105–110 [Article] (in Chinese) [Google Scholar]
- YU Zhentao, LYU Junwei, GUO Ning, et al. Error compensation of tetrahedron magnetic gradiometer[J]. Optics and Precision Engineering, 2014, 22(10): 2683–2690 [Article] (in Chinese) [CrossRef] [Google Scholar]
- SCHMIDT P, CLARK D, LESLIE K, et al. GETIVIAG-a SQUID magnetic tensor gradiometer for mineral and oil exploration[J]. Exploration Geophysics, 2004, 35(4): 297–305 [Article] [CrossRef] [Google Scholar]
- PANG H, PAN M, CHEN J, et al. Integrated calibration and magnetic disturbance compensation of three-axis magnetometers[J]. Measurement, 2016, 93: 409–413 [Article] [CrossRef] [Google Scholar]
- PANG Hongfeng. Error analysis and calibration/compensation method of strap-down geomagnetic vector measurement system[D]. Changsha: National University of Defense Technology, 2015: 18–33 (in Chinese) [Google Scholar]
- TIAN Zheng. A Method of eliminating adjacent frequency interference in magnetic field measurement of double probe fluxgate magnetometer[J]. Transations of China Electrotechnical Society, 2020, 35(2): 321–327 [Article] (in Chinese) [Google Scholar]
- ZHU Xingle. Method for horizontal attitude correction of thriaxial fluxgate[J]. Ship Electronic Engineering, 2019, 64(8): 64–68 [Article] (in Chinese) [Google Scholar]
- PANG H F, CHEN D X, PAN M C, et al. Nonlinear temperature compensation of fluxgate magnetometers with a least-squares support vector machine[J]. Measurement Science & Technology, 2012, 23(2): 8–25 [Google Scholar]
- YU Zhentao, LYU Junwei, BI Bo, et al. A vehicle magnetic noise compensation method for the tetrahedron magnetic gradiometer[J]. Acta Physica Sinca, 2014, 63(11): 139–144 [Article] (in Chinese) [Google Scholar]
- ZHANG Guang, ZHANG Yingtang, YIN Gang, et al. Calibration method of magnetic tensor systembased on linear error model[J]. Journal of Jilin University, 2015, 45(3): 1012–1016 [Article] (in Chinese) [Google Scholar]
- WANG Jie, GUO Ziqi, LIU Jianying. Analysis on magnetic compensation model of fixed-wing UAV aeromagnetic detection system[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(11): 3435–3443 [Article] (in Chinese) [Google Scholar]
- HAN Q, DOU Z H, TONG X J, et al. A modified Tolles-Lawson model robust to the errors of the three-axis strapdown magnetometer[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(3): 334–338 [CrossRef] [Google Scholar]
- LI Qingzhu, LI Zhining. Integrated calibration of magnetic gradient tensor system based on ellipsoid fitting[J]. Journal of Chinese Inertial Technology, 2018, 26(2): 187–195 [Article] (in Chinese) [Google Scholar]
- SCHMIDT P, CLARK D. The magnetic gradient tensor: its properties and uses in source characterization[J]. The Leading Edge, 2006, 25(1): 75–78 [CrossRef] [Google Scholar]
All Tables
All Figures
|
图1 磁通门三轴示意图 |
| In the text | |
|
图2 磁强计阵列布放模拟 |
| In the text | |
|
图3 横倾转换模型 |
| In the text | |
|
图4 俯仰转换模型 |
| In the text | |
|
图5 方位转换模型 |
| In the text | |
|
图6 三维转台 |
| In the text | |
|
图7 空间磁场测量值三维示意图 |
| In the text | |
|
图8 空间磁场校正结果三维示意图 |
| In the text | |
|
图9 磁场总场值校正结果 |
| In the text | |
|
图10 补偿校正前后磁场测量结果对比 |
| In the text | |
|
图11 无磁转台 |
| In the text | |
|
图12 测量输出校正结果 |
| In the text | |
|
图13 计算精度 |
| In the text | |
|
图14 三维转台实验结果 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.