| Issue |
JNWPU
Volume 43, Number 3, June 2025
|
|
|---|---|---|
| Page(s) | 509 - 516 | |
| DOI | https://doi.org/10.1051/jnwpu/20254330509 | |
| Published online | 11 August 2025 | |
Application of data-driven method in flow field reconstruction of unmanned underwater vehicle pump-jet propulsor
数据驱动在水下无人航行器泵喷推进器流场重构中的应用
Department of Missile and Weapon, Naval Submarine Academy, Qingdao 266199, China
Received:
13
April
2024
Abstract
To address the difficulty of obtaining high fidelity flow field information for unmanned underwater vehicle pump-jet propulsor, the accuracy of super-resolution flow field reconstruction by using a hybrid down-sampling skip connection/multi-scale reconstruction model of data-driven methods is investigated. This model can use the nonlinear distribution of bias and weight to establish a complex relationship between the low resolution and the super-resolution flow fields. Comparing with the experimental and numerical simulation methods, which has the advantages of high efficiency, low cost, and high accuracy. Meanwhile, the uncertainty distribution of super-resolution reconstruction of pump-jet propulsor was analyzed by using the variational Bayesian theory. The results indicate that the hybrid data-driven model with variational Bayesian theory has higher accuracy in reconstructing the flow field of pump-jet propulsor, and high reconstruction errors are mainly distributed in the hub area and rotor blade rotation area. The present method can increase the low resolution flow field of the unmanned underwater vehicles pump-jet propulsor by 256 times, high uncertainty area is mainly distributed at the peak of the reconstructed curve.
摘要
针对水下无人航行器泵喷推进器难以获取高保真流场信息的缺陷, 利用数据驱动方法中的混合下采样跳跃连接/多尺度重构模型研究了后置定子泵喷推进器超分辨流场重构的准确性。该模型可利用偏置、权重的非线性分布建立低分辨率流场与超分辨率流场之间的复杂关系。相比实验方法, 所提方法存在成本低的优势, 而相比数值仿真方法, 存在效率高、精度高的优势。同时, 结合变分贝叶斯理论分析了泵喷推进器超分辨重构的不确定性分布。研究结果表明: 含有变分贝叶斯理论的混合数据驱动模型重构泵喷推进器准确性更高, 较高的重构误差主要分布在轮毂区域及叶片旋转区域。该方法可将水下无人航行器泵喷推进器的低分辨流场提高256倍, 较高不确定性区域主要分布在重构曲线的波峰处。
Key words: pump-jet propulsor / data driven / flow field reconstruction / variational Bayesian
关键字 : 泵喷推进器 / 数据驱动 / 流场重构 / 变分贝叶斯
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
泵喷推进器是一种应用在潜艇、自主水下航行器等海军装备上的新型动力装置[1]。随着海军装备信息化的高速发展, 水下无人航行器隐身性能、机动性能将成为作战成功的关键。目前, 泵喷推进器主要分为前置定子和后置定子2种类型[2]。前置定子可起到稳流作用从而降低流场噪声, 此类型泵喷推进器主要应用于潜艇装备, 如特拉法尔加级核潜艇、凯旋级导弹核潜艇等。后置定子可利用定子装置回收尾流中的旋转能量从而提高推进效率, 此类型泵喷推进器主要应用在水下无人航行器装备中。相比传统螺旋桨、导管桨, 泵喷推进器具有高临界速度、低噪声、高推进效率等优势[3-4]。泵喷推进器主要由转子叶片、定子叶片、导管、轮毂等组成。目前, 泵喷推进器的研究主要分为实验方法和数值仿真方法, 由于泵喷推进器结构复杂, 实验方法存在成本昂贵、流场精度较低等缺陷。而数值仿真方法需要千万级的网格划分和计算, 存在计算周期长、耗费计算资源等缺陷[5-6]。而来流速度、不同旋转速度、不同海况等边界条件对泵喷推进器的流场变化影响较大, 这对海军装备的研究是不利的。如何充分利用泵喷推进器已有的低分辨流场信息高效准确地获取高保真流场信息具有重要研究价值。高精度的流场信息对于水下航行器泵喷推进器的噪声及推进性能研究也具有重要的军事意义。
实验方法是获取泵喷推进器流场信息较为精确且可靠的方法, 目前阶段流场实验测试大多数采用粒子图像测速(PIV)方法。Qin等[7]利用PIV方法研究了前置定子泵喷推进器的流场分布, 但结果发现流场信息捕捉不全, 尤其是转子及叶顶间隙等核心区域, 主要受到粒子分布及图像采集系统精度限制。近些年, 国内外研究者开始利用数据驱动理论中的超分辨率(super resolution, SR)方法去处理低分辨率(low resolution, LR)的流场信息, 且获取了精确的高保真流场信息[8-9]。江昊等[10]利用亚像素卷积神经网络重建了低分辨率的湍流边界层流场, 结果发现在较大缩放因子下此方法的精度高于传统的Bicubic重建方法, 且可将流场分辨率提高64倍。Liu等[11]利用静态卷积神经网络和多路径时间尺度神经网络重建了各向同性湍流和渠道湍流的低分辨流场, 结果发现可将时空流场分辨率提高256倍。Masaki等[12]利用自编码器重建了具有缺失区域的人工粒子速度场信息, 结果表明此方法不仅可精确重建速度场, 且可以重建隐藏的速度场信息。Fukami等[13-14]利用混合下采样多尺度模型重构了二维衰减湍流流场, 重构效果与DNS计算结果一致, 结果也表明此方法可将流场分辨率提高322倍。Qiu等[15]利用多路径时间尺度模型探究了泵喷推进器超分辨流场重建的准确性分布。
数据驱动方法已在流体力学领域得到了较多的应用, 且重建精度和重建倍数较高。数据驱动方法在水下航行器泵喷推进器领域的研究较少, 超分辨率重构方法可作为一种辅助手段提高实验或数值仿真方法获取流场的分辨率, 从而降低实验成本。本文将利用混合下采样跳跃连接/多尺度模型(hybrid down-sampled skip-connection/multi-scale, DSC/MS)和泵喷推进器的低分辨速度场信息去获取超分辨速度场信息, 也结合变分贝叶斯(variational bayesian, VB)理论设计一种新型VB-DSC/MS模型去分析重建水下航行器泵喷推进器重建速度场的不确定分布。本文设计的2种重建速度场模型一旦训练完成, 就可以利用泵喷推进器低分辨率速度场获取高保真的速度场信息, 这对于处理泵喷推进器的低分辨率PIV速度场信息是有利的, 且对研究泵喷推进器的噪声及水动力性能具有较高价值。
1 数值仿真及数据集获取
1.1 泵喷推进器网格划分及边界条件
数据驱动方法对数据集的数量及工况范围要求较高, 只有提高更多的数据集, 数据驱动模型才可以学习到更多泵喷推进器的流场信息。通过实验方法获取数据集的方式困难且成本高。目前, 大多数的研究采用了数值仿真数据作为数据驱动模型的数据集来源, 且取得了较高的预测及重构精度。为获取更大范围的泵喷推进器数据集, 本研究采用数值仿真手段获取不同旋转速度工况下的速度场作为数据集。
数值仿真采用的几何模型如图 1所示, 其中转子叶片采用NACA 6612翼型结构, 定子叶片采用NACA 4506翼型结构。转子叶片的最大直径长度为250 mm, 轮毂长度设置为170 mm, 叶片间隙尺寸采用1 mm。基于分块网格生成技术的结构化网格具有生成质量高、占用内存少的优点, 且结构化网格会生成物面周围高质量网格, 对于边界层流动的模拟是有利的。图 2展示了泵喷推进器的全结构化网格, 可看出转子、定子及叶顶间隙部分网格密度大于外域网格密度。转子和定子叶片表面采用了O-Block网格, 而导管轴向采用HC-Block网格。叶顶间隙区域采用了双层“O”型网格, 总网格数目为1.68×107。
 |
图1 水下航行器泵喷推进器结构示意图 |
 |
图2 水下航行器泵喷推进器全结构化网格 |
边界条件的设置对水下航行器泵喷推进器的仿真精度也具有重要影响,详细的边界条件设置如图 3所示。包含旋转的转子域、静止的定子域及外域。为使得水下航行器泵喷推进器的尾流得到充分发展,整个流体域设置为15Dmax(Dmax为转子叶片直径),流体域的直径设置为8Dmax。流体域左侧设置为速度入口,速度设置为25.72 m/s,不同进速系数通过改变旋转速度改变。流体域右侧设置为压力出口,压力设置为0 Pa。外域壁面设置为自由滑移界面,转子叶片、定子叶片、导管壁面等设置为无滑移界面。
 |
图3 水下航行器泵喷推进器边界条件设置 |
1.2 网格无关性影响分析
在数值仿真方法中,网格的质量及数量将会影响数值仿真阶段的收敛速度和准确性。较多数目的网格不仅会造成计算资源的浪费,它还增加了泵喷推进器流场计算的时间成本。而较少数目的网格会降低流场数值仿真的精度和分辨率,进而降低流场重构数据集的精确性。因此有必要开展网格数量无关性验证。本文基于ROACHE[16]的网格无关性验证理论开展了水下航行器泵喷推进器网格数量无关性验证,其中网格收敛指数(grid convergence index, GCI)定义为:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
式中:f1和f2分别表示2种网格数量工况下水下航行器泵喷推进器的推力系数或转矩系数;p为阶数,本文设置为2;Fs为仿真过程的安全因子,Fs=3;d是仿真维度,本文d=3。本研究选择的3种网格数量分别为3.27×107(细网格), 1.68×107(粗网格), 8.3×106(差网格),5种不同进速系数下水下航行器泵喷推进器的推力、转矩系数被用作验证网格无关性。通过GCI值的分布可发现粗网格的最大GCI值仅为2.79%,而差网格的GCI值高达4.86%。说明粗网格对数值仿真结果的影响误差较小,从误差值可看出粗网格可满足仿真精度需求。因此,本文综合考虑水下航行器泵喷推进器数值仿真的计算资源需求、计算时间及结果精度,选择的仿真网格数量为1.68×107。
1.3 流场重构数据集准确性分析
数据驱动方法会利用数值仿真方法产生的大量数据集去映射水下航行器泵喷推进器低分辨率流场与超分辨率流场之间的关系,因此数据集的准确性分析尤为重要。本文基于Liu等[17]开展的后置定子泵喷推进器实验数据进行了数据集准确性分析,且为便于比较不同旋转速度工况下的速度场信息,需对推力系数、转矩系数等进行无量纲化处理。其中,泵喷推进器推力系数的表达式为Kt=Tr+s/(ρn2Dmax2),转矩系数表达式为KQ=Qd+s/(ρn2Dmax5)。式中,Tr+s为泵喷推进器转定子的推力,而Qd+s为转矩,n为推进器转速值,ρ为流体密度。
表 1利用水下航行器泵喷推进器推进效率的实验数据与仿真数据进行了数据集准确性分析,由表 1看出5种不同进速系数下的效率误差值都在3%以内。最小的效率误差值仅为1.03%,最大的效率误差值也仅为2.61%,这些误差值都在水下航行器泵喷推进器要求的合理误差范围以内。
水下航行器泵喷推进器数据集验证
通过上述不同进速系数工况下的误差分析, 进一步说明了本文采用的水下航行器泵喷推进器流场重构数据集的准确性符合要求, 它可准确地利用数据驱动方法建立低分辨率速度场与超分辨率速度场之间的非线性关系。
2 数据驱动模型的搭建
2.1 流场超分辨重构理论
流场超分辨重构是将低分辨率流场重构为超分辨率流场的一种方法, 它可用于处理PIV方法获取的低分辨率实验流场数据。传统的超分辨率方法主要包含最近邻差值方法、双线性差值方法、双立方差值方法等。但传统的超分辨方法存在重建精度低、计算繁琐等问题。基于数据驱动方法的超分辨率重构方法在流体力学领域得到了较为充分的应用。相关的理论如(5)~(6)式所示。
 (5)
(5)
 (6)
(6)
式中: SSR代表重建的水下航行器泵喷推进器的超分辨率速度场; SLR是利用下采样方法获取的低分辨率速度场。F是完成超分辨率重建的函数, θ则是模型中的学习参数。
本文将采用数值仿真方法获取水下航行器泵喷推进器的低分辨率流场数据和超分辨流场数据集。低分辨率流场数据采用下采样平均池化方法获取, 能够通过不同的缩放因子获取不同下采样缩放倍数的低分辨流场数据。本文采用的缩放因子倍数分别为4, 8, 16, 意味着设计的超分辨重构模型可将泵喷推进器的低分率流场分别提高16, 64, 256倍。
2.2 混合下采样跳跃连接/多尺度模型搭建
Fukami等[13-14]比较了混合下采样跳跃连接/多尺度模型(DSC/MS)重构算法与卷积神经网络(CNN)重构流场算法在重构圆柱扰流方面的性能差异, 研究发现DSC/MS算法在重构大缩放因子模式下的流场性能更加优异。基于此理论, 本文设计了用于重构水下航行器泵喷推进器速度场的DSC/MS与VB-DSC/MS算法。
可看出, DSC/MS超分辨率重构算法由两部分组成, 上半部分为由不同CNN路径组成的多路径特征提取模块。相比单一的CNN重构算法, 此部分可从不同路径和时空尺度去提取水下航行器泵喷推进器速度场的特征, 尤其是速度梯度变化较大或速度场信息丰富的区域, 此部分可进一步辅助DSC/MS算法提高单一CNN网络过滤掉的速度场特征信息。下半部分为跳跃连接过程, 包含数据压缩和网络的跳跃连接过程。数据压缩过程可提高水下航行器泵喷推进器速度场重构过程中的数据平移和旋转特征的鲁棒性。网络跳跃过程也可从不同尺度去提取水下航行器泵喷推进器低分辨率速度场的大尺度和小尺度特征信息。
2.3 变分贝叶斯理论及数据集组成
相比于单一的DSC/MS网络, VB-DSC/MS由于加入了变分贝叶斯思想, 可以考虑水下航行器泵喷推进器速度场的先验知识, 进而建立泵喷推进器速度场先验知识与后验知识之间的概率关系, (7)式展示了速度场重构先验知识与后验知识之间的关系。
 (7)
(7)
式中: SLR*代表训练集中的低分辨速度场数据; SSR*则表示超分辨重构中的超分辨速度场数据。变分贝叶斯理论与传统的神经网络相比, 最大的区别在于偏置和权重是以概率的形式分布, 而不是传统的点值形式。
本研究将会按照6∶2∶1的比例划分训练集、测试集及验证集。转速区间2 000~3 600 r/min作为数据集来源, 每间隔200 r/min作为一个转速工况, 共计10个工况。其中, 转速工况2 800和转速工况3 600 r/min作为测试集, 而2 400 r/min作为验证集, 其他转速工况的数据集作为训练集。
3 预测结果与讨论
3.1 定子域速度场重构准确性分析
本文选择了2种转速工况2 800和3 600 r/min作为测试集。而工况3 600 r/min(高转速工况)位于训练集区间之外, 因此高转速工况的重构效果更能说明超分辨重构模型的准确性和泛化能力, 本文仅选择高转速工况作为准确性分析工况。相比水下航行器泵喷推进器的尾流速度场, 由于叶顶间隙的存在, 定子域流场更加复杂, 这就加剧了数据驱动方法重构推进器流场的难度。图 4展示了2种数据驱动方法VB-DSC/MS和DSC/MS在重构3种不同缩放因子(r=4, 8, 16)下的流场重构云图。可看出, 定子域速度场的速度轮廓和梯度变化都被较好地进行重构, 虽然相邻定子叶片间的速度梯度变化较大, 但数据驱动方法仍较好地捕捉了叶片间隙的速度变化。叶片盘面和周围流场的轮廓也被较好地进行重构。
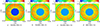 |
图4 定子域速度场重构流场云图 |
对于不同的缩放因子, 较低缩放因子r=4下的流场速度大小能够被较好重构。对于较高的缩放因子(r=8, 16), 定子叶片盘面和轮毂区域的速度值被重建偏低。总体来说, 仅从重建速度场云图来看, VB-DSC/MS和DSC/MS方法的重建效果差异较小。
图 5说明了2种数据驱动方法重构不同缩放因子模式下的流场重构误差。总体来说, 重构误差都在合理范围以内, 较高的误差主要分布在定子叶片盘面处, 周围流场和轮毂的误差较低。对于较低的缩放因子工况(r=4, 8), 大多数误差分布在1%以下, 仅存在少部分点状高误差分布, 这可能由数据驱动方法的波动性造成。上述研究也可说明VB-DSC/MS方法可将水下航行器泵喷推进器的定子域流场时刻分辨率提高64倍。
 |
图5 定子域速度场重构流场误差云图 |
当缩放因子提高到r=16时, 较高误差的分布比较明显, 基本布满整个定子叶片的盘面, 但相邻定子叶片间的误差较低, 误差基本分布在2.5%以内, 这就进一步说明VB-DSC/MS方法可将水下航行器泵喷推进器的流场时刻分辨率提高256倍。相比DSC/MS算法,由图 5c)~5d)也可看出VB-DSC/MS的重构准确性略高, 这就说明考虑定子速度场先验知识的优越性。总体来说, 2种数据驱动方法都可将水下航行器泵喷推进器的定子域速度场时空分辨率提高256倍。
3.2 尾流速度场重构准确性分析
相比定子域流场, 尾流流场的速度轮廓及速度梯度变化相对稳定, 但是尾流场数据集的数据量较小, 这也会提高数据驱动方法重构水下航行器泵喷推进器尾流速度场的难度。图 6展示了2种数据驱动方法VB-DSC/MS和DSC/MS在重构尾流速度场方面的误差云图分布, 可看出主要的误差依然分布在轮毂和叶片盘面对应位置。由图 6a)~6c)可看出随着缩放因子的增大, 误差逐渐增大。在较小缩放因子(r=4, 8)工况下, 误差分布范围较小, 大部分误差分布在2%以内。这就说明VB-DSC/MS算法可有足够高的准确性将水下航行器泵喷推进器尾流速度场时空分辨率提高64倍。当缩放因子升高到r=16时, 叶片盘面对应位置的误差升高比较明显, 且轮毂区域出现了超过5%的误差, 其他区域的误差都分布在3%以下。但轮毂区域并未出现划分网格, 此部分尾流场速度值为0, 这部分误差可忽略。
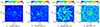 |
图6 尾流速度场重构流场误差云图 |
总体来说, VB-DSC/MS可将水下航行器泵喷推进器低分辨速度场分辨率提高256倍, 这也为处理低分辨的泵喷推进器PIV流场数据提供了方案参考。由图 6c~6d)可看出VB-DSC/MS算法的重构准确性更高, 主要体现在通过DSC/MS算法重构的尾流场在叶片盘面对应位置的误差分布更多, 且轮毂区域超过5%误差的区域面积更大, 叶片对应区域的误差呈现明显的点状分布。这进一步说明考虑推进器速度场先验知识的优越性和稳定性。
3.3 超分辨率流场重构不确定性分析
不确定性指的是数据驱动方法在重构水下航行器泵喷推进器速度场方面的稳定性和鲁棒性, 与重构准确性存在一定关系。不确定性分布区域越小, 就说明数据驱动的准确性和稳定性更高。图 7展示了VB-DSC/MS算法在重构尾流场和定子域流场方面的不确性分布。可以看出, 随着缩放因子的增大, 定子域和尾流速度场的不确定性分布面积逐渐增大。较高的不确定性分布在重构速度曲线的2个波峰处, 在较高的缩放因子r=16下, 重构速度场的波谷处也出现了较高的不确定性分布。但所有的重构速度数据都分布在95%的置信区间以内, 这可以说明VB-DSC/MS算法在重建水下航行器泵喷推进器定子域和尾流速度场方面具有较高的稳定性和鲁棒性。总体来说, 定子域的不确性分布低于尾流速度场的不确性分布, 这与定子域含有更加丰富的流场数据集具有重要关系。
 |
图7 重构定子域、尾流场不确性分布分布 |
4 结论
水下航行器泵喷推进器的速度场对于推进效率、噪声水平的研究是至关重要的。当前阶段大多数学者采用实验和数值仿真方法来研究水下航行器泵喷推进器速度场的演化规律。实验方法存在成本高、分辨率低的缺陷, 数值仿真方法存在耗费计算时间及资源的劣势。本研究利用数据驱动方法结合变分贝叶斯理论设计了用于重构流场的VB-DSC/MS和DSC/MS算法, 它可高效并精确地重建定子域及尾流速度场, 这为处理低分辨率的速度场数提供了新的方法和思路。本文得到的主要结论如下:
1) 2种数据驱动方法都可较为精确地将水下航行器泵喷推进器定子域及尾流速度场分辨率提高256倍, 且随着缩放因子的升高误差逐渐升高。
2) 重构误差主要分布在叶片盘面处和轮毂区域, 且相比DSC/MS算法, 考虑速度场先验知识的VB-DSC/MS算法重构精度更高。
3) 随着缩放因子的升高, 不确定性分布面积逐渐增大。较高的不确定性分布在重构速度曲线的波峰和波谷区域, 但所有的重构速度值都分布在95%置信区间以内。
尽管数据驱动方法在水下航行器泵喷推进器流场重构方面存在较高可行性和准确性, 但仍存在重构模型迁移能力弱、大型高保真数据集获取困难、湍流尾涡等小尺度信息重构困难等挑战。本研究可为数据驱动方法在水下航行器泵喷推进器重构中的应用提供参考, 仍需在嵌入物理信息的新型重构模型开发和重构泛化能力方面做进一步研究和探索。
References
- QIN Denghui, HUANG Qiaogao, PAN Guang, et al. Performance and flow analysis of propeller, ducted propeller and pump-jet in marine propulsion[J]. China Shipbuilding, 2022, 63(2): 52–65 (in Chinese) [Google Scholar]
- PENG Yunlong, WANG Yongsheng, LIU Chengjiang, et al. Comparative analysis of the hydrodynamic performance of front-stator pump-jets[J]. Journal of Harbin Engineering University, 2019, 40(1): 132–140 (in Chinese) [Google Scholar]
- JIN Shuanbao, ZHU Hao, WANG Dong, et al. Research on the global parameters selection and design of pumpjet of underwater vehicle[J]. Journal of Harbin Engineering University, 2018, 39(5): 851–856 (in Chinese) [Google Scholar]
- LU Lin, LI Qiang, GAO Yuefei. Influence of different blade tip clearance on the performance of pump jet propellers[J]. Huazhong University of Science and Technology, 2017, 45(8): 110–114 (in Chinese) [Google Scholar]
- YUAN Jianping, WANG Zilu, WANG Longyan. Review of pump jet propulsion performance and noise research[J]. Naval Science and Technology, 2022, 44(6): 1–7 (in Chinese) [Google Scholar]
- ZHANG Weiwei, KOU Jiaqing, LIU Yilang, et al. Intelligent empowerment of fluid mechanics prospects[J]. Chinese Journal of Aeronautics, 2021, 42(4): 524689 (in Chinese) [Google Scholar]
- QIN D, HUANG Q, PAN G, et al. Numerical simulation of vortex instabilities in the wake of a preswirl pumpjet propulsor[J]. Physics of Fluids, 2021, 33: 055119 [CrossRef] [Google Scholar]
- HYOJIN K, JUNHYUK K, SUNGJIN W, et al. Unsupervised deep learning for super-resolution reconstruction of turbulence[J]. Journal of Fluid Mechanics, 2021(910): 29 [Google Scholar]
- DENG Z W, H, C X, LIU Y Z. Super-resolution reconstruction of turbulent velocity fields using a generative adversarial network-based artificial intelligence framework[J]. Physics of Fluids, 2019, 31125111 [Google Scholar]
- JIANG Hao, WANG Bofu, ZHUANG Qiliang, et al. Reconstruction of turbulent flow field based on super-resolution reconstruction method[J]. Journal of Experimental Fluid Mechanics, 2022, 36(3): 102–109 (in Chinese) [Google Scholar]
- LIU Y Q, QIN H, ZHANG Z D, et al. Probabilistic spatiotemporal wind speed forecasting based on a variational Bayesian deep learning model[J]. Applied Energy, 2020, 260: 114259 [Google Scholar]
- MUSTAFA Z Y, YU L Q, HEE-CHANG L. High-fidelity reconstruction of turbulent flow from spatially limited data using enhanced super-resolution generative adversarial network[J]. Physics of Fluids, 2021, 33: 125119 [Google Scholar]
- FUKAMI K, FUKAGATA K, TAIRA K. Super-resolution reconstruction of turbulent flows with machine learning[J]. Journal of Fluid Mechanics, 2019(870): 106–120 [Google Scholar]
- FUKAMI K, FUKAGATA K, TAIRA K. Machine-learning-based spatio-temporal super resolution reconstruction of turbulent flows[J]. Journal of Fluid Mechanics, 2021909): 1–24 [Google Scholar]
- QIU C C, HUANG Q G, PAN G, et al. Multi-path deep learning framework on discrete pressure points to predict velocity field of pump-jet propulsor[J]. Applied Ocean Research, 2022, 103: 103173 [Google Scholar]
- ROACHE P J. Quantification of uncertainty in computational fluid dynamics[J]. Annual Review of Fluid Mechanics, 1997, 29(1): 123–160 [CrossRef] [Google Scholar]
- LIU Zhanyi, SONG Baowei, HUANG Qiaogao, et al. Applying CFD technique to calculating successful hydrodynamic performance of pump-jet propulsor[J]. Journal of Northwestern Polytechnical University, 2010, 28(5): 724–729 (in Chinese) [Google Scholar]
All Tables
All Figures
|
图1 水下航行器泵喷推进器结构示意图 |
| In the text | |
|
图2 水下航行器泵喷推进器全结构化网格 |
| In the text | |
|
图3 水下航行器泵喷推进器边界条件设置 |
| In the text | |
|
图4 定子域速度场重构流场云图 |
| In the text | |
|
图5 定子域速度场重构流场误差云图 |
| In the text | |
|
图6 尾流速度场重构流场误差云图 |
| In the text | |
|
图7 重构定子域、尾流场不确性分布分布 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.