| Issue |
JNWPU
Volume 43, Number 6, December 2025
|
|
|---|---|---|
| Page(s) | 1101 - 1109 | |
| DOI | https://doi.org/10.1051/jnwpu/20254361101 | |
| Published online | 02 February 2026 | |
A method for tail rotor aerodynamic force prediction under rotor interference based on coupled momentum source and blade element theory
耦合动量源和叶素理论的旋翼干扰下尾桨气动力预测方法
1
School of Aeronautics, Northwestern Polytechnical University, Xi'an 710072, China
2
飞行器基础布局全国重点实验室, 陕西 西安 710072 -->
National Key Laboratory of Aircraft Configuration Design, Xi'an 710072, China
3
Jiangxi Hongdu Aviation Industry Group Co., Ltd., Nanchang 330021, China
4
National Key Laboratory of Science and Technology on Aerodynamic Design and Research, Xi'an 710072, China
5
Key Laboratory of Rotor Aerodynamics, China Aerodynamics Research and Development Center, Mianyang 621000, China
6
China Helicopter Research and Development Institute, Jingdezhen 333001, China
Received:
8
January
2025
Abstract
Due to the influence of slip flow and wake, the tail rotor of a helicopter may produce strong unsteady aerodynamic force in its main rotor interference flow field, which may affect the helicopter control and lead to structural failure. Although the unsteady flow field simulation method can capture the details of the flow field, the calculation amount is large. Therefore, this paper presents a fast method of tail rotor aerodynamic force prediction based on coupled momentum source and blade element theory. The momentum source model takes into account the disturbance of the flow field of a main rotor to that of a tail rotor. The induced velocity of the tail rotor is extracted from the flow field, and its quasi-steady aerodynamic force is solved iteratively with the blade element theory. In order to verify the accuracy of the method, this paper carries out the prediction of the tail rotor's aerodynamic characteristics under the main rotor's interference with different sideslip angles. In the range of 0° to 30° sideslip angles, the error of the tail rotor's average pull coefficient obtained with the fast prediction method is 2.31% to 4.50% compared with the wind tunnel experiment. Compared with the experiment, the error of the unsteady flow simulation method using the sliding grid is -4.50% to 1.20%, but the calculation amount of the experiment is only 9.61%. In the forward flight state of a small sideslip, regardless of whether the rotor slip sweeps the tail rotor, compared with the tail rotor's average pull predicted with the unsteady flow simulation method, the error of the fast prediction method is -6.19% to 6.15%. The average value of the unsteady pull coefficient of a single blade and the peak value of the first and second order blade passing frequency are close to those of the unsteady flow simulation method.
摘要
由于滑流和尾迹的影响, 直升机尾桨在旋翼干扰流场中可能会产生强烈的非定常气动力, 严重时会影响直升机操纵, 导致结构失效。非定常流场仿真方法虽然能够捕捉流场细节, 但计算量大。因此, 提出了一种耦合动量源和叶素理论的尾桨气动力快速预测方法。利用动量源模型考虑旋翼对尾桨流场的干扰作用, 提取尾桨诱导速度, 并通过叶素理论迭代求解尾桨的准定常气动力。为验证其准确性, 开展了不同侧滑角旋翼干扰下尾桨气动力特性预测, 在0°~30°侧滑角范围内, 快速预测方法得到的尾桨平均拉力系数相对风洞实验的误差为2.31%~4.50%, 非定常流场仿真方法相对实验的误差为-4.50%~1.20%, 但前者计算量仅为后者的9.61%。在小侧滑的前飞状态下, 不论旋翼的滑流是否扫掠尾桨, 相比于非定常流场仿真方法预测的尾桨平均拉力, 快速预测方法的误差为-6.19%~6.15%, 单片桨叶的非定常拉力系数的平均值、峰谷值、一阶和二阶叶片通过频率处的峰值都与非定常流场仿真方法接近, 验证了耦合方法的气动力特性预测精度。
Key words: aerodynamic interference / blade element theory / momentum source / main rotor / tail rotor
关键字 : 气动干扰 / 叶素理论 / 动量源 / 旋翼 / 尾桨
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
在现代直升机设计中, 尾桨的气动性能对直升机的操控性和飞行品质起着至关重要的作用。随着直升机向高速和高机动性发展, 其结构更加紧凑, 旋翼和尾桨的载荷增加,加剧了旋翼对尾桨流动的干扰作用, 产生复杂的非定常气动力。在极端情况下, 可能导致直升机尾部振动、桨叶疲劳, 甚至操控失效。因此, 预测旋翼干扰下尾桨的气动力特性, 并分析其干扰机理, 对于解决这些问题至关重要, 也是近年来直升机气动领域的研究热点。
旋翼对尾桨流动干扰研究方法通常分3类: 实验方法、理论方法和仿真方法。这些方法都是在孤立旋翼或尾桨特性研究基础上发展为考虑旋翼对尾桨流动干扰研究。
由于旋翼/尾桨干扰的气动特性远比孤立旋翼或尾桨复杂, 早期的研究主要依赖于实验。例如: Wiesner和Kohler[1]开展了侧风、尾桨位置和地效对旋翼/尾桨干扰的实验, 发现底部向前旋转尾桨可有效减少尾桨与主旋翼尾流、地面涡流和翼尖涡流的不利影响。Doolan和Leclercq[2]进行旋翼桨尖涡对尾桨干扰实验, 发现垂直于尾桨的旋翼尾迹导致尾桨表面非定常压力显著改变。Kaynes等[3]通过风洞实验发现, 侧滑方向50~60°风导致严重的旋翼对尾桨干扰, 致使尾桨拉力显著下降, 最小仅为孤立尾桨拉力的0.3。由于风洞实验研究成本较高, 只能对少数干扰状态进行研究, 难以深入流场细节和机理。
理论方法以动量理论和涡流理论为基础。这2种方法都基于孤立尾桨的气动理论模型, 先假设尾桨桨盘有均匀来流或者按照某些规律变化的入流模型, 再采用经验模型修正的方法, 以研究旋翼对尾桨气流干扰。例如Srinivas等[4]引入旋翼叶尖涡流, 尾桨流场基于动量理论计算, 并采用经验模型修正, 模拟了主旋翼尾迹对尾桨气动载荷的影响, 结果显示旋翼叶尖涡流增加了尾桨拉力。然而, 由于入流速度分布不准确, 且经验依赖于特定的旋翼和尾桨, 这种方法对旋翼/尾桨耦合流场的描述不够精细, 准确度有限。
相比理论方法, 仿真方法具有良好的通用性和准确性, 目前主要有自由尾迹法和CFD方法2类数值方法。自由尾迹法计算量较小, 但由于尾迹涡量是由桨叶中弧面的偶极子得到, 并受限于桨尖涡经验模型, 因此准确度有限。基于自由尾迹方法的研究有: Quackenbush和Bliss[5]采用自由尾迹方法分析了不同前进比下主旋翼/尾桨气动干扰, 结果表明垂直于尾桨桨盘的旋翼尾迹对尾桨局部流场影响较大。尹坚平等[6–7]采用自由尾迹方法分析了悬停状态下的尾桨气动载荷, 发现尾桨尾流发生强烈变形, 当尾桨远离旋翼时, 二者干扰减弱。谭剑锋等[8–9]基于非定常面元/时间步进法修正了面元法的压力项, 并考虑由旋翼桨尖涡诱导的时变项, 研究悬停和侧滑状态下旋翼/尾桨的气动干扰, 分析了尾桨拉力系数随风向特性变化的规律。CFD方法通过离散旋翼和尾桨的流动区域, 采用N-S方程求解流场, 因此准确度更高, 但计算量显著增加。CFD方法在旋转桨叶流场模拟方面主要分为准定常的动量源模型和基于嵌套网格的非定常流场仿真方法。动量源模型采用无限多个桨叶的简化条件, 桨盘近似为厚度为零的制动盘, 基于叶素理论, 积分出桨叶气动特性。通常需要输入桨盘的目标拉力以预测桨叶气动特性和流场特性, 因此多用于求解桨叶的时间平均效应。常规的动量源方法采用孤立桨叶的叶素模型和诱导速度模型来预测桨盘拉力, 由于无法预测干扰流场下尾桨拉力的改变量因而适用性有限, 但可以提供旋翼和尾桨相互干扰下的准定常流场平均流场特性。例如Ruith[10]采用动量源模型计算了旋翼/尾桨在悬停和前飞下的流场, 获得了旋翼与尾桨桨盘的速度分布, 以及机身的压力分布。非定常流场仿真方法可以捕捉到流场的细节, 用于研究旋翼尾迹和叶尖涡对尾桨特性影响。已有的相关研究有: Wang等[11]将旋翼简化为动量源模型作为尾桨的干扰源, 尾桨采用非定常滑移网格方法, 研究了旋翼/尾桨干扰在不同侧滑状态下的尾桨气动特性, 与实验结果吻合良好。Yang等[12]采用嵌套网格技术研究悬停或前飞时旋翼和尾桨的相互作用, 发现2个状态下尾桨叶尖涡与旋翼叶尖涡存在干扰现象。徐国华团队[13–14]采用嵌套网格技术, 计算结果显示尾桨旋转方向对旋翼干扰状态下尾桨气动力的影响是不同的, 在不同的飞行状态下各有优势。孙钰锟等[15]采用数值模拟研究侧风状态下孤立尾桨的气动特性, 获得了涡环状态下尾桨气动力动态变化过程。由于精细化的数值方法依赖于空间和时间的离散精度,因此计算量巨大。
为开发一种高效准确的旋翼干扰下尾桨的气动特性计算方法,本文耦合动量源模型和叶素理论,采用准定常双动量源模型进行旋翼和尾桨的流场模拟, 提取干扰流场中尾桨桨盘的诱导速度, 输入到叶素理论中, 计算干扰气流下的尾桨拉力系数, 迭代更新动量源中的旋翼和尾桨拉力系数, 再更新流场,实现快速求解尾桨气动力的闭环研究。
1 旋翼干扰下尾桨气动力快速预测方法
本文构建的耦合动量源模型与叶素理论的尾桨气动力预测方法(称为快速预测方法)流程图如图 1所示, 包含流场求解、尾桨气动力求解和更新尾桨拉力3个部分。首先, 尾桨(旋翼)的拉力初值由孤立尾桨(旋翼)的叶素理论和入流模型提供, 输入到旋翼和尾桨组合的双动量源模型中。其次, 采用准定常CFD方法, 利用旋翼/尾桨干扰的双动量源模型进行流场求解, 提取尾桨桨盘诱导速度, 代入叶素理论; 随后, 根据速度矢量叠加原理, 得到尾桨叶素攻角及马赫数, 并结合翼型气动力的神经网络模型获得叶素气动力, 再对桨叶积分得到桨盘的拉力; 最后, 更新动量源模型中的尾桨拉力, 直至尾桨拉力收敛。迭代过程中, 由于尾桨对旋翼的干扰较小, 故只更新尾桨的桨盘拉力。
 |
图1 尾桨拉力迭代流程图 |
2 动量源模型
动量源模型用于求解尾桨的诱导速度, 在模型中将旋转叶片以虚拟盘近似替代, 流场的变化以虚拟盘体上分布的源项形式代入动量方程, 厚度为零的虚拟盘上单元与有限体网格上的多个网格单元关联。流场信息从叶片单元中心的CFD网格单元插值获取。根据叶素理论, 选取桨叶任意方位角和半径位置r处的桨叶剖面微段为研究对象, 可得到每个桨叶剖面的dCl与dCd。
将微段处求得的升阻力分解到桨盘坐标系(ξ, η, ε)中, 得到微段处的拉力dCT和阻力dCH。将其转化为有量纲的dT和dH之后, 由牛顿第三定律可得桨叶微段对气流的作用力F。
由于叶片仅用其总旋转时间的有限部分穿过控制体积, 因此时间平均源项按时间分数进行比例缩放, 桨盘上的动量源项可以表示为
 (1)
(1)
式中:b为桨叶片数;Δϕ为叶片在穿过叶片单元时行进的距离。
3 叶素理论
叶素理论假设桨叶为无限多个, 沿径向和周向分为若干个叶素段, 相邻叶素无干扰。图 2显示了桨叶叶素截面的速度与气动力分解, θ为总距,α为叶素实际攻角,α1为诱导角,UP和UT分别为叶素的轴向速度与周向速度,vi为诱导速度, 本文孤立尾桨的诱导速度由Pitt/Peters[16]入流模型给出。
 |
图2 叶素气动力分解 |
径向位置为r的叶素气动力系数计算公式如下
 (2)
(2)
 (3)
(3)
式中: dCl和dCd分别为叶素的升阻力系数; Cl和Cd为翼型的升阻力系数; c为翼型弦长。
将叶素升阻力系数投影到桨盘平面得到叶素的拉力系数, 并沿着环向和展向积分后, 得到整个桨盘的拉力系数。
 (4)
(4)
 (5)
(5)
4 翼型气动力的神经网络模型
为了插值求解旋翼和尾桨上叶素在不同工况下的气动特性, 本文开发了基于翼型数据库的神经网络模型。首先采用CFD方法完成不同马赫数、站位(x=r/R)和攻角α的翼型绕流数值模拟, 样本数共计325。再采用BP神经网络方法[17], 以攻角马赫数与站位作为输入层, 升力系数与阻力系数作为输出层, 通过训练数据得到对应翼型在需求工况下的气动特性。
取70%的样本数据作为训练点, 15%作为验证点, 15%作为测试点, 隐藏神经元10层, 使用贝叶斯正则化算法, 得到翼型气动力函数, 即
 (6)
(6)
 (7)
(7)
5 干扰模型与方法验证
6 几何模型
本文采用文献[1]中的尾桨数据, 并与缩比的CH47-C旋翼[18]组成旋翼/尾桨干扰模型, 旋翼与尾桨的相对位置见图 3。其中, 高尾桨位置用于验证与研究不同侧滑角下旋翼对尾桨性能影响, 低尾桨位置用于研究不同前飞速度下旋翼对尾桨性能影响。尾桨由4片桨叶构成, 半径为0.239 m, 弦长0.043 2 m, 桨盘实度为0.23, 翼型为NACA0012, 总距固定为20°, 旋转方向为底部朝前。旋翼由3片桨叶构成, 翼型采用Boeing-v23010, 半径为1.22 m, 固定旋翼总距为7.2°, 忽略周期变距。
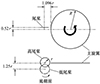 |
图3 旋翼/尾桨相对位置 |
7 快速预测方法的网格划分和求解设置
虚拟盘模型远场半径取15倍旋翼半径, 采用六面体非结构网格划分。旋翼和尾桨的盘面加密, 总网格量为540万, 迭代500步。求解采用准定常SST k-ω湍流模型, 耦合隐式求解器, 选用自由流边界条件,连续性、动量和能量方程以耦合方式作为方程的矢量同时求解。控制面对流通量采用Roe格式计算, 空间离散采用二阶。
8 神经网络模型构建
图 4给出了x=0.6, Ma=0.317站位下, -30°~30°迎角范围内CFD方法求解和神经网络拟合的翼型升力系数, 可以看出神经网络拟合值与CFD计算值吻合良好。
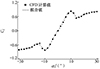 |
图4 x=0.6, Ma=0.317站位升力系数 |
9 快速预测方法迭代历程
以0°侧滑角下快速预测方法的尾桨拉力系数迭代历程为例, 经历4次迭代之后尾桨拉力系数收敛, 整个迭代在工作站上历时6 h, 而基于滑移网格的非定常流场仿真需要花费62.4 h, 计算时间前者仅为后者的9.61%, 计算效率得到显著提高。
10 非定常流场仿真方法的网格划分和求解设置
鉴于旋翼对尾桨干扰的实验数据有限, 为了评估快速预测方法的精度, 本文还采用了基于滑移网格的非定常流场仿真方法, 用于对比验证。图 5给出了旋翼和尾桨区域网格。流场采用了3套六面体非结构网格划分, 远场半径取15倍旋翼半径, 总网格量为1 300万, 其中旋翼桨盘网格量为676万, 尾桨桨盘网格量为432万。流场采用二阶时间离散, 时间步长取1.054×10-4 s, 对应尾桨转5°, 迭代时间为0.151 67 s, 对应尾桨旋转20圈, 其他求解设置与前文一致。
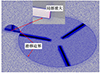 |
图5 滑移网格示意图 |
11 方法验证
采用风洞实验[1]中的孤立尾桨模型进行验证,尾桨底部朝前转动, 转速为828 r/s。计算来流速度为18 m/s、侧滑角0°~210°状态下的尾桨拉力系数,结果如图 6所示, 3种方法获得的尾桨平均拉力系数随侧滑角的变化趋势一致。快速方法对于实验的拉力系数的误差在-2.75%~13.57%, 非定常方法与实验结果更吻合, 相对误差-3.29%~4.20%。图 6还显示非定常流场仿真结果可代替实验数据。经过验证, 快速预测方法可在小侧滑角下, 准确预测孤立尾桨的平均拉力系数。
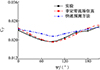 |
图6 孤立尾桨拉力系数随侧滑角的变化 |
12 旋翼对尾桨干扰的典型状态分析
13 不同侧滑角旋翼干扰下尾桨气动力预测
再采用风洞实验[1]中的干扰尾桨模型结果进行对比。侧滑角从0°到210°, 旋翼转速为186 r/s, 旋翼旋转一圈对应尾桨旋转4.45圈, 其余与前文的孤立尾桨计算状态一致。
孤立尾桨实验中, 固定尾桨在风洞轴线处, 侧滑角的改变是通过将尾桨绕旋翼中心转动到相应角度而实现的,即尾桨旋转平面与洞壁的夹角,而在干扰流动实验中, 侧滑角的改变是通过将尾桨绕旋翼中心转动到相应的与洞壁的夹角而实现的, 因此尾桨偏离风洞轴线, 与一侧洞壁间距较小而导致洞壁干扰, 这是实验不可避免的。从图 7给出的旋翼干扰下的尾桨拉力系数随侧滑角变化的曲线可以看出: 在侧滑角30°~150°范围, 因尾桨与风洞洞壁的距离较近, 洞壁干扰增强, 实验值较图 6中的孤立尾桨实验值增大, 曲线向上突起, 产生显著误差。谭剑锋[9]在相关文献中也做出了类似的解释。本文在使用非定常流场仿真和快速预测方法时, 均采用自由来流远场边界, 忽略洞壁干扰, 因此数值方法预测结果比实验值略低。图 7显示, 在侧滑角0°~30°和150°~210°范围内, 快速预测方法的尾桨拉力系数相对于实验的误差为2.31%~4.50%, 非定常流场仿真方法相对于实验的误差为-4.50%~1.20%, 快速预测方法相对于非定常流场仿真方法的结果误差为1.53%~9.43%。
 |
图7 尾桨拉力系数随侧滑角的变化 |
14 不同前飞速度的旋翼干扰下尾桨气动力预测
为探究旋翼滑流不扫过尾桨、扫过全尾桨和扫过部分尾桨下快速预测方法对尾桨拉力系数预测的准确度, 将尾桨下移1.25倍尾桨半径, 位置见图 3。分别采用快速预测方法和非定常流场仿真方法计算了4种平行于桨盘, 从机头向机尾的不同来流速度(2, 20, 30和40 m/s)对尾桨气动特性的影响。本算例中旋翼与尾桨的总距和转速与前文一致。为方便分析尾桨气动力在干扰流场中的频率变化, 将旋翼转速调整为207 r/s, 即尾桨转速的1/4倍。图 8给出了不同前飞速度下xoz平面速度分布, 可以看出2 m/s时, 旋翼滑流没有扫过尾桨平面, 可近似为不干扰; 20 m/s时, 旋翼滑流扫过尾桨前行桨叶区域; 30 m/s时, 旋翼滑流扫过整个尾桨平面; 40 m/s时, 旋翼扫过尾桨后行桨叶区域。
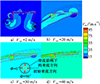 |
图8 不同前飞速度下旋翼滑流 |
图 9给出了单桨拉力系数随方位角的变化。因30 m/s和40 m/s结果接近, 故展示前3个结果。可见2种方法预测的曲线形状相似, 平均值和幅值接近, 频率一致, 相位略有差异。快速预测方法得到的拉力系数幅值略小于非定常流场仿真方法。来流速度大于20 m/s后, 非定常流场仿真方法的拉力系数曲线后移, 在20 m/s来流速度下相位后移最大, 随着速度增大相位差异逐渐减小。图 9中标注的旋翼环状脱落涡干扰由非定常流动仿真的涡量图可以解释, 详见文献[19]。
 |
图9 单桨拉力系数随方位角变化 |
将单桨的拉力系数均值、峰值和谷值对比显示到图 10中, 可见拉力系数随前飞速度的增大而增大, 以非定常流场仿真结果为基准, 快速预测方法的均值、峰值和谷值误差分别为-6.64%~5.83%, -18.61%~2.10%和-35.15%~106.38%。表明快速预测方法拉力系数的均值预测与非定常流场仿真方法接近; 峰值略小于非定常流场仿真方法, 谷值在大多状态下小于非定常流场仿真方法。
 |
图10 单桨拉力均值、峰值和谷值随前飞速度变化 |
为探究2种方法在预测桨盘诱导速度和尾桨气动力系数时的差异, 图 11对比了快速预测方法和非定常流场仿真方法获得的尾桨诱导速度的分布。
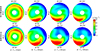 |
图11 不同前飞速度下尾桨诱导速度分布 |
图 11显示, 快速预测方法与非定常流场仿真方法的诱导速度分布十分接近。随着来流速度增大, 诱导速度关于中心轴对称性减弱, 最大值和最小值分布区域在后3个速度下的变化很小。快速预测方法预测得到的诱导速度分布趋势大体一致, 但诱导速度数值相同时,较大值、较小值区域面积略小于非定常流场仿真结果。
为对比2种方法尾桨拉力系数谐波分量差异, 图 12给出不同前飞速度下单桨拉力系数频域特性。因30 m/s和40 m/s结果接近, 因此不展示后者。非定常流场仿真方法在频域特性上表现为以尾桨基频1Ωt为主频, 2Ωt~6Ωt为次频, 随着频率的增加, 频率幅值减小。而快速预测方法预测的频率则以尾桨基频1Ωt为主频, 伴随有2Ωt为次频。从图 12可以看出, 在各种来流速度下, 快速预测方法的叶片轴频和二阶轴频与非定常流场仿真方法一致。表明该方法对于尾桨拉力谐波的一阶和二阶分量的频率预测准确, 对应的幅值存在一定差异, 这是由于快速预测方法的流场细节捕捉能力不足。
 |
图12 不同来流速度下单桨拉力系数频谱 |
正如图 9所示, 非定常流场仿真方法得到的尾桨拉力时域图中出现了一些曲线的小波动, 而快速预测方法在除去2 m/s风速外, 波形更光顺。这是因为快速预测方法并不能捕捉旋翼环状脱落涡打在尾桨上, 而这一现象产生高频率的涡破碎导致尾桨拉力系数波动。
通过侧滑角和前飞速度对旋翼尾桨干扰影响的分析, 对比2种方法可以看出, 在小侧滑下快速预测方法预测的拉力系数均值接近非定常流场仿真方法, 幅值略小于非定常流场仿真方法, 二者尾桨诱导速度分布基本一致, 拉力系数的时域和频域分布基本相同。侧滑角不大于30°范围内, 快速预测方法高效准确, 显著缩短计算周期。
15 结论
本文耦合了动量源和叶素理论, 发展了一种旋翼干扰下尾桨气动力的快速预测方法。应用于不同侧滑角与前飞状态, 结果表明该法计算时间仅为非定常流场仿真方法的9.61%, 平均拉力系数准确度达到非定常流场仿真方法的90.6%。主要结论如下:
1) 快速预测方法在预测尾桨拉力系数均值和随方位角波动以及桨盘诱导速度分布具有较高的精度。在孤立尾桨状态下, 尾桨拉力系数相对于实验的误差为-2.75%~13.57%。
2) 在侧滑角0°~30°时, 旋翼干扰下的尾桨拉力系数相对于实验的误差为2.31%~4.50%, 相对于非定常流场仿真方法的误差为1.53%~9.43%。
3) 该方法适用于不同前飞状态的尾桨气动力特性计算。对于旋翼滑流不扫掠、部分扫掠和全扫掠尾桨的3种状态, 快速预测方法均给出了准确的尾桨平均和动态拉力。相比于非定常预测方法, 其平均拉力的误差为-6.19%~6.15%。
4) 快速预测方法在预测旋翼尾桨干扰下的尾桨载荷频率上具有可靠的精度。能够捕捉到尾桨单片桨叶旋转频率的1倍和2倍频率。
5) 在不同侧滑角和前飞速度状态下,快速预测方法获得的尾桨诱导速度分布与非定常流场仿真方法规律相同,最大诱导速度和最小诱导速度的绝对值略小于非定常流场仿真方法。
References
- WIESNER W, KOHLER G. Tail rotor performance in presence of main rotor, ground, and winds[J]. Journal of the American Helicopter Society, 1974, 19(3): 2–9 [Article] [Google Scholar]
- DOOLAN C J, LECLERCQ D. An anechoic wind tunnel for the investigation of the main-rotor/tail-rotor blade vortex interaction[C]//Proceedings of the 6th Australian Vertiflite Conference on Helicopter Technology, Virginia, 2007 [Google Scholar]
- KAYNES I W, PREATONI G, VISINGARDI A, et al. Heliflow pitch-up and quartering flight experiments[C]//26th European Rotorcraft Forum, the Hague, the Netherlands, 2000 [Google Scholar]
- SRINIVAS V, CHOPRA I, HAAS D, et al. Prediction of tail rotor thrust and yaw control effectiveness[J]. Journal of the American Helicopter Society, 1995, 40(4): 34–43 [Article] [Google Scholar]
- QUACKENBUSH T R, BLISS D B. Prediction of high-resolution flow fields for rotorcraft aeroacoustics[J]. AIAA Journal, 1991, 29(11): 1778–1786 [Article] [Google Scholar]
- YIN Jianping, HU Zhangwei. Numerical simulation of mutual interference between helicopter main and tail rotors' free wakes[J]. Acta Aerodynamica Sinica, 1998(4): 21–25 (in Chinese) [Google Scholar]
- YIN J P, AHMED S R. Aerodynamics and aeroacoustics of helicopter main-rotor/tail-rotor interaction[C]//15th Aerodynamic Decelerator Systems Technology Conference, Reston, 1999: 1-13 [Google Scholar]
- TAN Jianfeng, WANG Haowen. Numerical analysis of unsteady aerodynamic interference of helicopter rotor/fuselage[J]. Acta Aerodynamica Sinica, 2014, 32(3): 320–327 (in Chinese) [Google Scholar]
- TAN Jianfeng. Influence of helicopter rotor on unsteady aerodynamic loads of tail rotor[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(10): 3228–3240 (in Chinese) [Google Scholar]
- RUISH Michael. Unstructured, multiplex rotor source model with thrust and moment trimming-fluent's VBM model[C]//23rd AIAA Applied Aerodynamics Conference, 2012 [Google Scholar]
- WANG C, HUANG M, MA S, et al. Main rotor wake interference effects on tail rotor thrust in crosswind[J]. International Journal of Aerospace Engineering, 2021(1): 9994115 [Google Scholar]
- YANG C, AONYAMA T, KONDON N, et al. Numerical analysis for main-rotor/tail-rotor interaction of helicopter[R]. JAXA-RR-08-006E, 2009 [Google Scholar]
- FAN Feng, XU Guohua, SHI Yongjie. Unsteady aerodynamic interference calculation of helicopter rotor/tail rotor based on CFD method[J]. Journal of Aerospace Power, 2014, 29(11): 2633–2642 (in Chinese) [Google Scholar]
- YE Zhou, XU Guohua, SHI Yongjie. Calculation of rotor/tail rotor/tail gas dynamic interference of helicopter[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9): 2874–2883 (in Chinese) [Google Scholar]
- SUN Yukun, WANG Long, WANG Tongguang, et al. Aerodynamic characteristics and crosswind resistance optimization of isolated tail rotor under crosswind[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(10): 65–81 (in Chinese) [Google Scholar]
- CHEN R T N. A survey of nonuniform inflow models for rotorcraft flight dynamics and control applications[R]. NASA TM 1989-102219 [Google Scholar]
- LI Jinsheng, CHANG Sijiang, CHEN Shengfu. Projectile resistance coefficient Identification based on neural network algorithm[J]. Acta Ballistics Sinica, 2018, 30(4): 38–43 (in Chinese) [Google Scholar]
- SPRING S C, NIEMANN J R, GRADY G W. Preliminary airworthiness evaluation CH-47C with fiberglass rotor blades (with T55-L-712 engines)[EB/OL]. (2023-09-14)[2025-01-03]. http://handle.dtic.mil/100.2/ADA06989 [Google Scholar]
- WEN Long, Research on aerodynamic performance of heli copter tail rotor in main rotor interference flow field[D]. Xi'an: Northwestern Polytechnical University, 2025 (in Chinese) [Google Scholar]
All Figures
|
图1 尾桨拉力迭代流程图 |
| In the text | |
|
图2 叶素气动力分解 |
| In the text | |
|
图3 旋翼/尾桨相对位置 |
| In the text | |
|
图4 x=0.6, Ma=0.317站位升力系数 |
| In the text | |
|
图5 滑移网格示意图 |
| In the text | |
|
图6 孤立尾桨拉力系数随侧滑角的变化 |
| In the text | |
|
图7 尾桨拉力系数随侧滑角的变化 |
| In the text | |
|
图8 不同前飞速度下旋翼滑流 |
| In the text | |
|
图9 单桨拉力系数随方位角变化 |
| In the text | |
|
图10 单桨拉力均值、峰值和谷值随前飞速度变化 |
| In the text | |
|
图11 不同前飞速度下尾桨诱导速度分布 |
| In the text | |
|
图12 不同来流速度下单桨拉力系数频谱 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.