| Issue |
JNWPU
Volume 43, Number 6, December 2025
|
|
|---|---|---|
| Page(s) | 1162 - 1172 | |
| DOI | https://doi.org/10.1051/jnwpu/20254361162 | |
| Published online | 02 February 2026 | |
The sound source identification of elastic network regularized generalized inverse beamforming based on iterative shrinkage thresholding
迭代收缩阈值弹性网正则化广义逆波束形成声源识别方法
1
National Key Laboratory of Underwater Acoustic Technology, Harbin Engineering University, Harbin 150001, China
2
Key Laboratory of Marine Information Acquisition and Security(Harbin Engineering University), Ministry of Industry and Information Technology, Harbin 150001, China
3
College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, China
4
China Ship Scientific Research Center, Wuxi 214082, China
Received:
6
January
2025
Abstract
In this paper, aiming at the problem of noise source location of underwater targets, considering the spatial sparsity of sound sources, the elastic network regularization generalized inverse beamforming with iterative shrinkage threshold is employed to realize the localization of the noise source. Firstly, the L1 norm is introduced according to the sparsity of the sound source, and the objective function combining the L1 norm with the generalized inverse beamforming is obtained. The iterative shrinkage threshold algorithm is proposed to solve the function and get the position information of the sound source. Secondly, sound source identification is easily affected by noise when there is only an L1 norm, which reduces its robustness. Therefore, this paper proposes employing the L2 norm to obtain the objective function jointly constrained by the L1 norm and the L2 norm, the elastic net regularized generalized inverse beamforming. The combination of the L1 norm and the L2 norm can ensure that the convergence result is more robust. Then the iterative shrinkage threshold algorithm is used to solve the elastic network regularized generalized inverse beamforming and obtain the position information of the sound source. Finally, the performance of the proposed method is compared with other noise source localization methods through simulation and experimental data processing. The proposed method has the highest noise source localization accuracy and resolution.
摘要
针对水下目标噪声源定位问题, 考虑声源的空间稀疏性, 使用迭代收缩阈值弹性网正则化广义逆波束形成方法, 实现噪声源的定位。根据声源的稀疏性引入L1范数, 获得L1范数与广义逆波束形成相结合的目标函数, 提出使用迭代收缩阈值算法求解该函数进而获取声源位置信息; 由于仅有L1范数时声源识别结果易受噪声影响, 降低结果的稳健性, 因此提出引入L2范数, 获得L1范数和L2范数共同约束的目标函数, 即弹性网正则化广义逆波束形成, L1范数和L2范数可以保证收敛结果更稳健, 然后将弹性网正则化广义逆波束形成视为类Lasso问题, 并使用迭代收缩阈值算法求解进而获取声源位置信息; 通过仿真和试验处理对比了迭代收缩阈值弹性网正则化广义逆波束形成与其他噪声源定位方法的性能, 结果显示所提方法的噪声源定位精度和分辨率最高。
Key words: generalized inverse beamforming / elastic network regularized generalized inverse beamforming / iterative shrinkage threshold / fast iterative shrinkage threshold
关键字 : 广义逆波束形成 / 弹性网正则化广义逆波束形成 / 迭代收缩阈值 / 快速迭代收缩阈值
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
声隐身性是水下目标最基本的指标之一,开展水下目标噪声源定位识别研究[1–2],确定主要噪声源空间位置,是进行噪声控制的前提。基于水听器阵列测量的波束形成技术是一种高效的噪声源定位方法,在噪声源定位中,实际空间的声源个数相对于扫描的空间区域往往是稀疏的,因此国内外相关学者开展了基于声源稀疏问题的波束形成方法研究[3–4]。
广义逆波束形成(generalized inverse beam-forming, GIB)[5–6]通过较少的迭代求逆过程有效降低旁瓣级水平、提高声源识别分辨率,广泛应用于不同类型噪声源的定位识别[7–8],但是由于声阵测量误差无法避免,导致实际采集的数据存在误差,直接对其进行噪声源定位识别,结果有所偏差, 且反演求逆过程中还存在病态不适定问题[9–10]。针对广义逆波束形成的不适定问题,相关学者开展了各种研究。Presezniak等[11]为了提高噪声源识别精度,提出了一种加权广义逆波束形成方法,该方法采用加权伪逆方法和优化过程,与传统广义逆波束形成相比,该方法的声源识别精度更高。Zavala等[12]提出自动正则化因子来改进广义逆波束形成方法,并引入一个虚拟目标网格,获得源映射和强度估计,最后,使用2个简单的声源比较具有固定正则化因子的广义逆波束形成和正则化广义逆波束形成的性能。Suzuki[5]提出引入L1范数正则化方法求解广义逆波束形成,体现了声源的稀疏特性,但单独引入L1范数正则化无法消除求逆过程中噪声干扰的影响,且该方法的稳健性较差。徐中明等[13]将L1范数和L2范数充分结合,提出基于弹性网正则化的广义逆波束形成方法,不仅体现声源信号的稀疏特性还能保证噪声源定位识别结果稳健,但其噪声源定位精度较低。由于弹性网正则化广义逆波束形成方法中L1范数和L2范数严重影响其噪声源定位精度,且求解时主要采用凸优化工具包CVX,该工具包在工程软件中应用时不具有可移植性,因此本文提出将弹性网正则化广义逆波束形成视为类Lasso(least absolute shrinkage and selection operator)问题,使用迭代阈值算法求解。
Daubechies等[14]提出迭代收缩阈值(iterative shrink-age thresholding algorithm, ISTA)算法并用于解决信号、图像处理中出现的线性逆问题。由于ISTA算法收敛速度较慢,Bredies[15]提出了快速迭代收缩阈值方法(fast iterative shrinkage thre-sholding algorithm, FISTA),它在保留ISTA算法计算简单特性的同时,使得算法的全局收敛速度得到了很大改善。Wang等[16]将改进的快速迭代收缩阈值算法(IFISTA)用于优化振动信号的重建,该方法具有更高的重建精度和更快的收敛速度。Shen等[17]提出了一种基于傅立叶的改进快速迭代收缩阈值算法(FFT-IFISTA),该算法可以选择合适的加权系数来减小主瓣宽度提高分辨率。Chen等[18]将FISTA方法运用到波束形成声源识别中,该方法具有更高的计算效率和更快的收敛速度。
综上可知,相关学者基于声源稀疏问题和广义逆波束形成方法不适定问题开展了大量研究,但基于声源稀疏问题的广义逆波束形成研究较少[19]。本文将声源稀疏问题转化为Lasso问题并使用ISTA方法求解,但仅有L1范数时声源识别易受噪声影响,降低声源识别稳健性,基于此本文提出引入L2范数获得弹性网正则化广义逆波束形成,这样由于L1范数和L2范数的共同作用可以保证收敛结果更稳健,然后使用ISTA方法求解弹性网正则化广义逆波束形成,通过仿真和试验数据处理验证了基于ISTA算法求解弹性网正则化广义逆波束形成(ISTA-GIB12)的噪声源定位精度和分辨率最高。
1 声源定位算法
2 弹性网正则化广义逆波束形成
3 L1范数约束广义逆波束形成
假设声场空间存在M元声压水听器组成的平面阵,其接收到声场信息组成的声压向量为P。其中  , 对接收信号的互谱矩阵R (p)进行特征值分解可得到
, 对接收信号的互谱矩阵R (p)进行特征值分解可得到
 (1)
(1)
式中: U为包含正交特征向量的酉矩阵; Λ为包含特征值的对角矩阵; um表示矩阵U中的第m列向量, 其相对应的特征值为σm。进一步可得第m阶特征模态向量的表达式
 (2)
(2)
在模态向量求取过程中利用阈值截断剔除较小特征值, 通常将截断阈值取最大特征值的0.1%~10%。因此, (2)式转化为
 (3)
(3)
GIB方法的思想是利用特征模态重建整个声源扫描域上的声能量分布信息(如图 1所示), 因此可以建立(4)式所示的声学传递方程。
 (4)
(4)
 |
图1 声源识别示意图 |
式中: qm为维度N×1的声源振幅向量, 其描述了在第m阶特征模态下扫描域共N个划分网格点的声能分布; Ggreen为网格点到各阵元之间的自由场格林函数传递矩阵, 其维度为M×N, 对(4)式进行解逆可求出第m阶源振幅向量qm。
通常情况下, 阵元数远小于声源面扫描点数, 且声源的个数相比于声源面往往是稀疏的, 因此(4)式是病态的, 直接求逆无法求解该方程, 为保证解的精度和稳定性, 结合L1范数约束求解, 其表达式为
 (5)
(5)
联立(2)~(4)式得
 (6)
(6)
式中,δ为约束参数, 其选择受信噪比、频率和测试距离的影响, 对(6)式结果影响较大。因此将其转化为正则化优化模型,如(7)式所示。
 (7)
(7)
式中, λ是L1范数正则化参数, 用于调节重构精度和稀疏性。(7)式即为经典的Lasso[20–21]问题。
4 弹性网正则化广义逆波束形成
仅有L1范数约束时广义逆波束形成声源识别结果容易受噪声影响, 降低声源识别稳健性, 本文提出引入L2范数, 保证收敛结果更稳健, 其模型为
 (8)
(8)
式中:η为L2范数正则化参数,其可以减少方程的病态性; δ为约束参数, 其选择受信噪比、频率和测试距离的影响, 对(8)式结果影响较大, 因此将其转化为正则化优化模型,如(9)式所示。
 (9)
(9)
式中:λ为L1范数正则化参数, 其选择与信噪比相关, 当信噪比较大时, λ取值较小, 当信噪比较小时, λ取值较大。(9)式即为弹性网正则化广义逆波束形成, 其既包含L1范数正则化又包含L2范数正则化, 通过L1范数得到声源强度的稀疏解并利用L2范数保证求解过程的稳健性。其中L1范数和L2范数影响其噪声源定位精度, 且求解时主要采用凸优化工具包CVX。由于CVX工具包在工程软件中应用时不具有可移植性, 且(9)式与Lasso问题类似, 其中  是一个连续的凸函数, 光滑性未知,
是一个连续的凸函数, 光滑性未知,  是一个光滑的凸函数。因此(9)式可以转化为二阶锥规划(second order cone programming)[22]问题, 从而使用内点法(interior point)[23]等求解。由于数据维度太大, 而内点法的算法复杂度为O(N3), 导致求解非常耗时, 因此本文提出使用迭代收缩阈值算法求解弹性网正则化广义逆波束形成。
是一个光滑的凸函数。因此(9)式可以转化为二阶锥规划(second order cone programming)[22]问题, 从而使用内点法(interior point)[23]等求解。由于数据维度太大, 而内点法的算法复杂度为O(N3), 导致求解非常耗时, 因此本文提出使用迭代收缩阈值算法求解弹性网正则化广义逆波束形成。
5 迭代阈值算法
6 迭代收缩阈值算法
很多研究者通过简单的基于梯度的方法[24]来求解(7)式和(9)式。迭代收缩阈值算法在每一次迭代中通过一个收缩阈值操作来更新qi, 通过(10)式求解(7)式和(9)式。
 (10)
(10)
式中:k为迭代次数;t(k)(>0)为步长, 一般要求  为收缩算子。
为收缩算子。
 (11)
(11)
式中: ()+表示  和0中的最大值; sgn为符号函数, 表示若qi大于0, 则sgn返回1;若qi等于0, 返回0;若qi小于 0, 则返回-1。(10)式即为迭代收缩阈值算法求解L1范数约束广义逆波束形成(ISTA-GIB)和弹性网正则化广义逆波束形成(ISTA-GIB12)。
和0中的最大值; sgn为符号函数, 表示若qi大于0, 则sgn返回1;若qi等于0, 返回0;若qi小于 0, 则返回-1。(10)式即为迭代收缩阈值算法求解L1范数约束广义逆波束形成(ISTA-GIB)和弹性网正则化广义逆波束形成(ISTA-GIB12)。
7 快速迭代收缩阈值算法
针对迭代收缩阈值算法收敛速度比较慢的问题, Bredies提出了快速迭代收缩阈值方法, 它在保留ISTA算法计算简单特性的同时, 使得算法的全局收敛速度得到了很大改善。FISTA算法初始化  。由第k次迭代计算结果q(k)到k+1迭代计算结果q(k+1)的公式为
。由第k次迭代计算结果q(k)到k+1迭代计算结果q(k+1)的公式为
 (12)
(12)
式中, P+表示在非负象限的欧几里得投影。使用(12)式求解(7)式和(9)式可得
 (13)
(13)
 (14)
(14)
(13) 式为快速迭代收缩阈值算法求解L1范数约束的广义逆波束形成(FISTA-GIB); (14)式为快速迭代收缩阈值算法求解弹性网正则化广义逆波束形成(FISTA-GIB12)。
8 数值仿真分析
为验证本文所提方法的性能, 本节分别使用非相干双声源、不同信噪比和不同频率的定位误差及空间分辨率对比不同方法的噪声源定位性能, 仿真和试验数据在配备1.70 GHz锐龙7 PRO 4750U处理器和16 GB内存的电脑上处理。
9 非相干双声源
使用下面的仿真条件对比GIB、ISTA-GIB、FISTA-GIB、ISTA-GIB12和FISTA-GIB12的噪声源定位性能。声源面与阵列的位置如图 1所示, 声源面上有2个等强度非相干单频声源, 声源位置分别为(x1, z1)=(-3, 0) m, (x2, z2)=(3, 0) m, 信噪比为0 dB, 声源面为长12 m, 宽10 m的平面, 将其离散为61×51的扫描点; 基阵为43×49的平面阵, 水平方向阵元间距为0.15 m, 垂直方向为43元声压嵌套线阵, 阵列结构如图 2所示, 声源面距离平面阵10 m。为便于对比分析各方法的结果, 将声学成像结果归一化为0 dB, 动态显示范围为15 dB。
 |
图2 43元声压嵌套线阵示意图 |
使用不同的噪声源定位方法获得1 600 Hz声源的声学成像结果如图 3所示, 其中3a)~3f)分别为GIB、ISTA-GIB、FISTA-GIB、ISTA-GIB12和FISTA-GIB12的定位结果以及成像结果剖面图,图中蓝色‘×’和‘·’为声源的真实位置。各方法在声源1处的定位误差和水平波束宽度如表 1所示。当频率为1 600 Hz时, 对比图 3a)~3c), 并结合图 3f)和表 1中各方法的主瓣宽度, 可知GIB方法定位声源主瓣宽度为1.26 m, 且背景有较多干扰, ISTA-GIB和FISTA-GIB方法主瓣宽度分别为0.66和0.68 m。对比图 3b)~3e), 并结合图 3f)和表 1可知ISTA-GIB12和FISTA-GIB12方法相对于ISTA-GIB和FISTA-GIB更窄, 有更高的分辨率; 对比图 3d)~3e), 并结合剖面图 3f)和表 1可知ISTA-GIB12相对于FISTA-GIB12有较窄的主瓣宽度, 更高的定位精度, 这是由于FISTA-GIB12相对于ISTA-GIB12有更快的收敛速度和更少的迭代次数, 其对于非声源区域的惩罚强度要弱于ISTA-GIB12, 因此其主瓣比ISTA-GIB12宽, 两者的收敛过程如图 4所示, 图中ISTA-GIB12迭代1 509次达到迭代终止条件, FISTA-GIB12迭代908次达到迭代终止条件, 验证了FISTA-GIB12方法有更快的收敛速度。
 |
图3 1 600 Hz频点声源定位结果 |
定位误差和水平波束宽度
 |
图4 收敛结果 |
10 不同SNR
为验证迭代收缩阈值弹性网正则化广义逆波束形成的性能, 本节使用一个单声源对比各方法在不同信噪比时的噪声源定位误差。仿真中单极子点声源坐标为(x1, z1)=(1.5, 1.25) m, 频率为500 Hz, 选取信噪比范围为[-10, 10]dB, 步长为2 dB, 进行了20次Monte-Carlo试验, 其余仿真条件与2.1节相同, 分别对比不同信噪比时5种方法的噪声源定位误差, 仿真结果如图 5所示。其中图 5a)为不同信噪比的定位误差, 图 5b)为[-10, 0]dB范围的局部放大图, 对比5种方法的定位误差可知随着信噪比的增加, 各方法的定位误差逐渐减小, 其中ISTA-GIB12的误差最小, 且5种方法的定位误差呈现出ISTA-GIB12 < FISTA-GIB12 < ISTA-GIB < FISTA-GIB < GIB的结果。
 |
图5 定位误差 |
11 空间分辨率
为验证迭代收缩阈值弹性网正则化广义逆波束形成的性能, 本节使用一个单声源对比不同方法在不同频率时的空间分辨率。空间分辨率是评价算法性能的重要指标, 它表征方法对多目标定位识别的能力。由波束形成的特点可得到, 噪声源的空间分辨率取决于波束宽度, 即只有当声源之间距离大于波束宽度才能分辨出声源, 本文中采用3 dB波束宽度表征空间分辨率的大小。仿真中单极子点声源坐标为(x1, z1)=(0, 0)m, 信噪比为0 dB, 频率范围为[100, 5 000]Hz, 阵声距离为5 m, 进行了20次Monte-Carlo试验, 分别对比不同频率时5种方法的空间分辨率, 仿真结果如图 6所示。其中图 6a)为水平方向分辨率, 图 6b)为垂直方向分辨率, 对比可知ISTA-GIB12方法的空间分辨率最高, 且在低频点有较好的空间分辨率, 且5种方法的空间分辨率呈现出ISTA-GIB12>FISTA-GIB12>ISTA-GIB>FISTA-GIB>GIB的结果。
 |
图6 不同方法的空间分辨率 |
12 试验验证
数值仿真结果表明基于ISTA算法求解的弹性网正则化广义逆波束形成(ISTA-GIB12)能有效消除旁瓣、提高声源定位精度。为进一步验证该方法的可行性及实用性,构建对应的噪声源定位试验,其中试验设备主要包含2个声源(见图 7)和43元线阵(见图 8),其中线阵有效声学段长度为7.2 m,包含2个相互嵌套的25元中心对称子阵,子阵1的阵元间距d=0.075 m,子阵2的阵元间距d=0.3 m,2个子阵共用7个阵元,阵列结构如图 2所示,阵列实物如图 8所示。
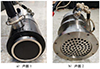 |
图7 声源 |
 |
图8 43元声压阵 |
图 9为消声水池试验示意图,水池长25 m,宽15 m,深10 m,六面覆盖消声尖劈,有效消声频率不小于2 kHz,当频率为1 600 Hz时吸声系数大于0.9可作为试验研究频点。
 |
图9 消声水池试验示意图 |
试验中2个声源固定于长2 m的连接杆上,连接杆中心固定于行车A旋转升降吊杆A下端,2个声源辐射面中心入水4.9 m,吊杆以0.05 m/s的速度在行程6.7 m内水平运动;测量基阵从行车B旋转升降吊杆B吊放入水,基阵中心阵元入水4.9 m,基阵下端系留重块,保证柔性测量基阵在水下为垂直形态;旋转升降吊杆A和旋转升降吊杆B间距为10.42 m。试验中根据逆合成孔径思想[25],假设声源不动基阵沿着反方向做匀速运动,则在运动方向上形成虚拟面阵,从而提高测量基阵在运动方向的声源识别分辨率。
图 10为声源1发射1 600 Hz单频点信号时5种方法的定位结果及其剖面图,对比GIB与ISTA-GIB、FISTA-GIB、ISTA-GIB12、FISTA-GIB12方法并结合剖面结果可知,GIB主瓣最宽,定位精度最差,本文提出的ISTA-GIB、FISTA-GIB、ISTA-GIB12和FISTA-GIB12方法定位精度均优于GIB,其中ISTA-GIB12方法定位精度最高,获得与仿真相同的结论。
 |
图10 1 600 Hz频点单声源定位结果 |
图 11为双声源同时发射1 600 Hz单频点信号时的噪声源定位识别结果,对比GIB与ISTA-GIB、FISTA-GIB、ISTA-GIB12、FISTA- GIB12方法并结合剖面结果可知,GIB主瓣最宽,定位精度最差,本文提出的ISTA-GIB、FISTA-GIB、ISTA-GIB12和FISTA-GIB12方法定位精度均优于GIB,其中ISTA-GIB12方法定位精度最高,获得与仿真相同的结论。
 |
图11 1 600 Hz频点双声源定位结果 |
图 12~13分别为仅声源1发射2 500 Hz信号信噪比为10 dB和1 dB时各方法的噪声源定位识别结果。对比5种方法并结合剖面结果可知,随着信噪比的减小各方法的识别结果均出现了干扰。当信噪比为1 dB时GIB识别结果中可以观察到5个较强声源,造成错误的识别结果;ISTA-GIB、FISTA-GIB、ISTA-GIB12和FISTA-GIB12算法中都观察到1个强源和2个弱源,也出现了噪声的干扰,结合剖面图可知ISTA-GIB12有更高的分辨率,获得与仿真相同的结论。
 |
图12 信噪比为10 dB时声源定位结果 |
 |
图13 信噪比为1 dB时声源定位结果 |
13 结论
本文针对声源的空间稀疏性问题,首先基于L1范数约束广义逆波束形成的目标函数提出使用ISTA算法求解并获取声源的位置信息;其次由于仅有L1范数时声源识别结果易受噪声影响,降低声源识别稳健性,因此本文提出引入L2范数获得新的目标函数解弹性网正则化广义逆波束形成,这样由于L1范数和L2范数的共同作用可以保证收敛结果更稳健,使用ISTA算法求解弹性网正则化广义逆波束形成,同时考虑对比FISTA和ISTA的性能,其中由于FISTA收敛速度比ISTA快,迭代次数较少造成其对于非声源区域的惩罚次数少于ISTA,因此其噪声源定位精度略差,若考虑计算效率问题则可以使用FISTA算法求解弹性网正则化广义逆波束形;最后通过仿真和试验数据处理验证了ISTA-GIB12方法的噪声源定位精度和分辨率最高,获得ISTA-GIB12>FISTA-GIB12>ISTA-GIB>FISTA-GIB>GIB的结论。
References
- ZHOU Yuyuan, SUN Chao, XIE Lei, et al. A method of estimating depth of moving sound source in shallow sea based on incoherently matched beam-wavenumber[J]. Acta Physica Sinica, 2023, 72(8): 180–193 (in Chinese) [Google Scholar]
- SHI Shengguo, GAO Yuan, ZHANG Haoyang, et al. A method of estimating depth of moving sound source in shallow sea based on incoherently matched beam-wavenumber[J]. Acta Physica Sinica, 2021, 70(13): 257–270 (in Chinese) [Google Scholar]
- FIRAT Umu, AKGV Tayfun. Compressive beamforming for direction-of-arrival estimation of cyclostationary propeller noise[J]. Signal Processing, 2024, 214: 109221 [Article] [Google Scholar]
- JIANG Shiyao, JIANG Rongxin, LIU Xuesong, et al. Probability-based complex-valued fast iterative shrinkage-thresholding algorithm for deconvolution beamforming[J]. IEEE Journal of Oceanic Engineering, 2024, 49(2): 340–351 [Article] [Google Scholar]
- SUZUKI Takao. L1 generalized inverse beam-forming algorithm resolving coherent/incoherent, distributed and multipole sources[J]. Journal of Sound and Vibration, 2011, 330(24): 5835–5851 [Article] [CrossRef] [Google Scholar]
- SHI Shengguo, GAO Yuan, YANG Deshen, et al. An improved generalized inverse beamforming-noise source localization method using acoustic vector sensor arrays[J]. IEEE Sensors Journal, 2021, 21(14): 16222–16235 [Article] [Google Scholar]
- ZAMPONI R, CHIARIOTTI P, Battista G, et al. 3D generalized inverse beamforming in wind tunnel aeroacoustic testing: application to a counter rotating open rotor aircraft model[J]. Applied Acoustics, 2020, 163: 107229 [Article] [Google Scholar]
- MERINO-MARTINEZ Roberto, LUESUTTHIVIBOON Salil, ZAMPONI Riccardo, et al. Assessment of the accuracy of microphone array methods for aeroacoustic measurements[J]. Journal of Sound and Vibration, 2020, 470115176 [Article] [Google Scholar]
- WU Yixuan, ZHANG K Haichong, KANG Jeeun, et al. An economic photoacoustic imaging platform using automatic laser synchronization and inverse beamforming[J]. Ultrasonics, 2020, 103: 106098 [Article] [Google Scholar]
- ZHANG Zhifei, CHEN Si, XU Zhongming, et al. Iterative regularization method in generalized inverse beamforming[J]. Journal of Sound and Vibration, 2017, 396: 108–121 [Article] [Google Scholar]
- PRESEZNIAK Flavio, ZAVALA PAULO A G, STEENACKERS Gunther, et al. Acoustic source identification using a generalized weighted inverse beamforming technique[J]. Mechanical Systems and Signal Processing, 2012, 32: 349–358 [Article] [Google Scholar]
- ZAVALA P A G, DE Roeck W, JANSSENS K, et al. Generalized inverse beamforming with optimized regularization strategy[J]. Mechanical Systems and Signal Processing, 2011, 25(3): 928–939 [Article] [Google Scholar]
- XU Zhongming, LI Yi, ZHANG Zhifei, et al. Generalized inverse beamforming with improved elastic net regularization[J]. Chinese Journal of Scientific Instrument, 2021, 42(6): 243–252 (in Chinese) [Google Scholar]
- DAUBECHIES I, DEFRISE M, DE MOL C. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint[J]. Communications on Pure and Applied Mathematics, 2004, 57(11): 1413–1457 [Article] [CrossRef] [Google Scholar]
- BREDIES K. An iterative thresholding-like algorithm for inverse problems with sparsity constraints in Banach space[J]. Journal of Inverse and Ill-posed Problems, 2009, 17(1): 19–26 [Google Scholar]
- WANG Qiang, MENG Chen, MA Weining, et al. Compressive sensing reconstruction for vibration signals based on the improved fast iterative shrinkage-thresholding algorithm[J]. Measurement, 2019, 142: 68–78 [Article] [Google Scholar]
- SHEN Linbang, CHU Zhigang, ZHANG Yongxiang, et al. A novel Fourier-based deconvolution algorithm with improved efficiency and convergence[J]. Journal of Low Frequency Noise Vibration and Active Control, 2020, 39(4): 866–878 [Article] [Google Scholar]
- CHEN Lin, XIAO Youhong, YANG Tiejun. Application of the improved fast iterative shrinkage-thresholding algorithms in sound source localization[J]. Applied Acoustics, 2021, 180: 108101 [Article] [Google Scholar]
- PENG Wei, TIAN Haoyang, HUANG Yu, et al. Low frequency defect location method for dry-type transformer basedon generalized inverse beamforming spectrum and compressed sensing[J]. Noise and Vibration Control, 2024, 44(6): 129–134 (in Chinese) [Google Scholar]
- HU Miaosen, ZHENG Guoqiang, SU Zhonge, et al. Short-term wind power prediction based on improved variational modal decomposition, least absolute shrinkage and selection operator, and BiGRU networks[J]. Energy, 2024, 303: 131951 [Article] [Google Scholar]
- LIU Shumei, CHEN Huiwei, LIU Peixue, et al. A novel electricity load forecasting based on probabilistic least absolute shrinkage and selection operator-Quantile regression neural network[J]. International Journal of Hydrogen Energy, 2023, 48(88): 34486–34500 [Article] [Google Scholar]
- TKACHUK Mykola, TKACHUK Anton. Large deformation of cable networks with fiber sliding as a second-order cone programming[J]. International Journal of Solids and Structures, 2024, 298: 112848 [Article] [Google Scholar]
- MALYUTA Danylo, REYNOLDS Taylor P, SZMUK Michael, et al. Convex optimization for trajectory generation: a tutorial on generating dynamically feasible trajectories reliably and efficiently[J]. IEEE Control Systems Magazine, 2022, 42(5): 40–113 [Article] [Google Scholar]
- ZHENG Peicong, LYU Xuantao, GONG Yi. Trainable proximal gradient descent-based channel estimation for mmwave massive MIMO systems[J]. IEEE Wireless Communications Letters, 2023, 12(10): 1781–1785 [Article] [Google Scholar]
- LIU Qin, CHU Ning, YU Liang, et al. Efficient localization of low-frequency sound source with non-synchronous measurement at coprime positions by alternating direction method of multipliers[J]. IEEE Trans on Instrumentation and Measurement, 2022, 71: 6501612 [Google Scholar]
All Tables
All Figures
|
图1 声源识别示意图 |
| In the text | |
|
图2 43元声压嵌套线阵示意图 |
| In the text | |
|
图3 1 600 Hz频点声源定位结果 |
| In the text | |
|
图4 收敛结果 |
| In the text | |
|
图5 定位误差 |
| In the text | |
|
图6 不同方法的空间分辨率 |
| In the text | |
|
图8 43元声压阵 |
| In the text | |
|
图9 消声水池试验示意图 |
| In the text | |
|
图10 1 600 Hz频点单声源定位结果 |
| In the text | |
|
图11 1 600 Hz频点双声源定位结果 |
| In the text | |
|
图12 信噪比为10 dB时声源定位结果 |
| In the text | |
|
图13 信噪比为1 dB时声源定位结果 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.