| Issue |
JNWPU
Volume 43, Number 6, December 2025
|
|
|---|---|---|
| Page(s) | 1153 - 1161 | |
| DOI | https://doi.org/10.1051/jnwpu/20254361153 | |
| Published online | 02 February 2026 | |
Dynamic coupling of nonlinear motion and unsteady aerodynamic load of helicopter bluff-body slung load
直升机钝体吊挂物非线性运动与非定常气动载荷动态耦合研究
1
Chinese Flight Test Establishment, Xi'an 710089, China
2
National Key Laboratory of Science and Technology on Rotorcraft Aerodynamics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
Received:
12
February
2025
Abstract
To analyze the dynamic coupling mechanisms between the nonlinear motion of a helicopter's bluff-body slung load and its unsteady aerodynamic load, and to further improve the prediction accuracy of coupling effects during the helicopter' slung load operations, this paper establishes the numerical simulation method based on computational fluid dynamics (CFD), which is applicable to the bluff-body slung load. Then, the mathematical model of the sling constraining the motion of the slung load is developed, and its rigid-body dynamics model of the slung load is also established. By coupling the CFD model of the slung load with the six-degree-of-freedom rigid-body dynamics model, the dynamic coupling mechanisms between the nonlinear motion of the bluff-body slung load and its unsteady aerodynamic loads are analyzed. The paper clarifies the influence of the transition from narrow-side to broad-side orientations of the slung load on the aerodynamic motion coupling characteristics. The analysis results indicate that the transition, which is triggered by the continuous increase in yaw angle oscillation amplitude, is the primary cause of instability during high-speed flight. During the transition, the drag, the side force and the roll and pitch moments of the slung load rapidly exchange and redistribute. This leads to the rapid attenuation of longitudinal oscillation, while the lateral oscillation amplitude increases significantly. Simultaneously, the yaw angle enters into a stable "spinning" mode. When the speed increases from 40 km/h to 64 km/h, the instability time occurs 40% earlier, and the oscillation amplitude increases by 150%.
摘要
为了分析直升机钝体吊挂物的非线性运动与非定常气动载荷的动态耦合机理, 进一步提高直升机吊挂飞行耦合效应的预测精度, 提出了适用于钝体吊挂物的CFD数值模拟方法, 建立了约束吊挂物运动的吊索数学模型以及吊挂物刚体动力学模型, 通过耦合吊挂物CFD模型和吊挂物刚体六自由度动力学模型, 开展了钝体吊挂物非线性运动与非定常气动载荷动态耦合机理分析, 阐明了吊挂物NS-BS过渡(从窄面到宽面姿态转换)对吊挂物气动-运动耦合特性的影响。结果表明: 偏航角振荡幅值持续增加引起的NS-BS过渡是直升机吊挂高速飞行失稳的核心诱因。过渡时, 吊挂物的阻力与侧力、滚转力矩和俯仰力矩快速交换并重新分布, 导致纵向摆动振荡快速减弱, 但横向摆动幅值激增, 同时偏航角进入稳定"打转"模式。当速度从40 km/h提升至64 km/h时, 失稳时间提前40%, 振荡幅值增加150%。
Key words: slung load / bluff body / nonlinear motion / aerodynamic load / unsteady flow / dynamic coupling / computational fluid dynamics / helicopter
关键字 : 吊挂物 / 钝体 / 非线性运动 / 气动载荷 / 非定常 / 动态耦合 / CFD / 直升机
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
直升机吊挂飞行在军事和民用领域运用广泛[1]。然而, 由于吊挂物常为形状不规则的钝体, 气动非定常效应显著, 气动载荷具有交变性和随机性, 易激发吊挂物大范围非线性运动, 而这反过来又会改变吊挂物气动环境, 构成非线性运动与非定常气动载荷的复杂动态耦合, 深入认识该耦合机理对于预测吊挂振荡幅值、保障直升机吊挂飞行安全具有重要意义。
钝体吊挂物的复杂非定常气动特性是直升机吊挂飞行不稳定性的主要原因之一。目前的模型大多采用准静态气动数据表插值的方法, 难以体现非定常气动载荷的激励, 不足以准确预测吊挂飞行稳定性和分析运动耦合效应。为此, 美军曾与Northcrop、Boeing等大型科研机构以及麻省理工学院、马里兰大学等学术机构合作, 对MILVAN集装箱的非定常气动载荷进行了风洞试验辨识。同时, 美军还与跨国科研机构合作研究钝体非定常绕流机理, 包括MILVAN的表面压强分布、绕流可视化试验以及非定常气动载荷函数等[2–4]。在此后的研究中, NASA发现了箱体吊挂物长边尺寸较长对非定常气动特性的不利影响更严重, 由此在以后的直升机吊挂飞行研究中主要采用CONEX集装箱, 但仍然存在显著的气动不稳定性[5–6]。
然而, 上述风洞试验方法代价高昂, 近年来, 随着计算流体力学(CFD)的发展, 使用CFD研究钝体吊挂物的非定常气动特性成为了可能。Cicolani等学者采用CFD工具(OVERFLOW)模拟了静态CONEX的非定常绕流, 认识了钝体脱落涡的动态特性, 并基于频域辨识方法提取了CONEX的非定常气动载荷频域响应特征, 得到了以传递函数表示吊挂物非定常气动载荷模型[7–8]。然而在实际吊挂飞行当中, 钝体吊挂物会在气动力、重力和吊索拉力的作用下发生运动, 因此仅仅对静态和给定运动下的钝体吊挂物进行数值模拟难以满足气动外形优化需求。Prosser等首先对钝体吊挂物的非线性运动与非定常气动载荷的动态耦合问题展开了研究, 使用NASA Langley研究中心开发的CFD工具(FUN3D), 结合Adams-Bashforth方法、混合RANS-LES方法和网格自适应方法提高动态耦合问题的计算精度和计算效率, 得到了钝体吊挂系统运动和非定常流场相互耦合的动态变化特征, 形成了先进的钝体吊挂物非线性运动与非定常气动载荷的动态耦合数值模拟方法[9–11], 提升了直升机吊挂飞行运动耦合效应的预测精度。在此基础上, Prosser等[12–13]综合了准定常气动载荷与由钝体非线性运动和脱落涡引起的非定常气动载荷周期项, 建立了钝体吊挂物的降阶气动载荷模型, 进一步提升了计算效率。相比之下, 目前国内对吊挂气动特性的研究主要集中于静态的吊挂物流场模拟与气动载荷计算[14–15], 未叠加吊挂物非线性运动的动态耦合作用。
鉴于此, 为了分析钝体吊挂物的非线性运动与非定常气动载荷的动态耦合机理, 进一步提高直升机吊挂飞行耦合效应的预测精度, 本文构建了基于Navier-Stokes方程和吊挂物刚体六自由度运动的吊挂物气动与动力学耦合特性计算方法, 开展了动态耦合机理分析。首先建立了适用于钝体吊挂物的CFD数值模拟方法, 之后建立了约束吊挂物运动的吊索数学模型, 最后建立了吊挂物刚体动力学模型, 通过耦合吊挂物CFD模型和吊挂物刚体六自由度动力学模型求解受吊索约束的吊挂物运动响应, 获取钝体吊挂物的非线性运动与非定常气动载荷的动态耦合机理。
1 吊挂气动与动力学动态耦合方法
2 吊挂物流场的CFD数值模拟方法
采用CFD方法模拟吊挂物的非定常流动现象, 具体模拟方法如下:
由于直升机带吊挂物时的飞行速度一般低于0.3倍声速, 本文使用有限体积法求解守恒格式的不可压N-S方程, 其控制方程为
 (1)
(1)
式中:W为流场守恒变量项;Fc为对流项; Fv为黏性项; Q为源项; t为时间; Ω为控制体的体积; dS为控制体的微元面积。其中流场守恒变量 W代表控制体的质量和动量, 表达式为
 (2)
(2)
式中:ρ表示流体微团密度;u, v, w表示流体微团当地速度分量。对流通量Fc表达式为
 (3)
(3)
式中:p为静压;V为控制单元面上法向速度;n为微元单位法向量, 表达式分别为
 (4)
(4)
黏性通量Fv为
 (5)
(5)
式中
 (6)
(6)
式中, 分子黏性  。
。
本文计算中不引入源项, 故Q=0。由于流场只有空气, 可忽略重力影响。
选取基于k-w SST湍流模型的DES方法, 该湍流模型的湍流长度尺度为
 (7)
(7)
式中
对控制方程在每个网格单元上采用基于格心格式的有限体积法进行空间离散, 该计算过程中每个控制体单元体积Ωi, j, k不随时间改变, 则可离散为
 (8)
(8)
将(8)式代入流场控制方程, 可以得到
 (9)
(9)
对于控制体Ωi, j, k, 方程右侧的面积分可以近似表示为在边界dΩ上通量的累加和离散源项, 即
 (10)
(10)
式中: N为网格单元Ω的面的数目; ΔS表示每个面对应的面积。将每个面通量之和  定义为残差
定义为残差  , 则可以得到
, 则可以得到
 (11)
(11)
为防止受限于CFL数导致计算不稳定, 本文使用隐式时间推进方法, 将(11)式离散为
 (12)
(12)
式中: 。(12)式两边同时添加显式项得到
。(12)式两边同时添加显式项得到
 (13)
(13)
将  代入(13)式得到
代入(13)式得到
 (14)
(14)
离散之后得到大型带状方程组, 使用LU-SGS方法求解可以避免矩阵求逆运算。
由于本文采用非定常计算, 采用计算效率较高的双时间步推进格式, 引入伪时间τ, 如(15)式所示, 在每个时间步内对伪时间推进得到真实时间步的解。
 (15)
(15)
为保证时间推进精度, 本文时间项选用二阶离散。
本文选用边界条件包括物面边界条件和远场边界条件。
1) 物面边界条件
在考虑黏性的作用时, 在物面边界条件上, 应该满足物面无滑移条件和物面不穿透边界条件, 即在物面上流体沿物面边界的切向和法向速度均为零。
2) 远场边界条件
在远场边界条件上应该免满足无反射边界条件, 认为物体产生的扰动可以传到无穷远处且不发生反射。本文的远场边界条件, 引用如(16)式所示的Riemann不变量。
 (16)
(16)
式中, 下标e和∞分别表示内场值和来流值。因而边界上的法向速度Vn和声速c为:
 (17)
(17)
根据法向速度可以从内场值和来流值分别得到边界上的切向速度Vt和熵s, 具体为:
(1) 亚声速入流边界(M∞n < 1, Vn < 0)有
 (18)
(18)
(2) 亚声速出流边界(M∞n < 1, Vn>0)有
 (19)
(19)
根据边界上的Vn, Vt, c, s和关系式  , 可得到边界上的u, v, w, p, ρ, 进一步计算得到边界上守恒变量的值。
, 可得到边界上的u, v, w, p, ρ, 进一步计算得到边界上守恒变量的值。
本文采用笛卡尔网格, 该网格为非结构六面体网格, 为方便改变吊挂物初始姿态并驱动吊挂物运动, 将网格分为背景网格和前景网格, 通过嵌套网格技术结合背景网格和前景网格。为减少边界对流场的影响同时不浪费计算资源, 选取30L×10L×10L(L为吊挂物长度)的长方体为背景网格计算域。为了嵌套时减小误差和计算时捕捉流场细节, 在前景网格可能运动处加密网格, 由于静止状态前景网格计算过程中位置不变故该加密区域较小; 为准确计算吊挂物脱落涡导致的气动力变化, 沿来流方向在上述加密处网格分2次加密; 为节约计算资源, 其他位置网格最疏。前景网格包含吊挂物, 由于吊挂物表面特征对气动特性影响不大, 将吊挂物简化为标准长方体, 为准确计算吊挂物气动力和周围流场变化, 在吊挂物表面网格最密,为计算流体黏性影响,在吊挂物附加边界层且边界层数为20, 计算显示吊挂物表面y+小于1, 其余位置网格尺度相同且与前景网格最密处相当。
3 吊索模型
本文中将吊索模型简化为一个弹簧阻尼系统, 如图 1所示, 该图提供了吊索建模方法的示意图, 该图中吊挂物通过4根吊索悬挂。每根吊索i对吊挂物的张力为Ti, 吊索上的张力沿空间中某一吊挂点O到吊挂物上吊挂点Pi的矢量方向为ei, 假设吊索受力处于绷紧状态。
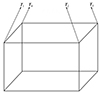 |
图1 吊索模型示意图 |
任一吊索上的张力Ti由两部分组成, 均沿ei方向,即
 (20)
(20)
式中:Fk为弹簧力; Fd为阻尼力。
对于伸直但不受力时长度为li的吊索, 弹簧力Fk是O与Pi之间距离di的函数, 其大小为
 (21)
(21)
式中,ki为吊索的弹簧系数。
如果只有弹簧力会导致吊索张力产生振荡, 难以达到某一稳定值, 引入阻尼力Fd消除该振荡, 该阻尼力是吊索伸长率的函数, 其大小为
 (22)
(22)
式中:ci为吊索的阻尼系数; vi为弹簧伸长率。在该模型中, 当di < li时吊索不产生任何力, 通过这种简便方式模拟了吊索松弛状态。
如果不希望吊索产生振荡, 在该模型中阻尼常数可以设置较大, 使该系统处于过阻尼状态。如果吊索弹簧常数较大, 可减小时间步长, 避免数值不稳定。
4 吊挂物动态运动模拟方法
首先建立地轴系,地轴系的原点Oe固定于地面上,其中OeXe轴指向吊挂物初始位置,方向与来流面相反,OeZe轴指向地心相反方向,OeYe轴方向使用右手法则确定。
然后建立吊挂物运动坐标系,该坐标系原点Ob处于吊挂物重心位置,固连于吊挂物,ObXb轴和ObZb轴位于吊挂物纵向对称面内,ObXb轴指向吊挂物尾部,ObZb轴指向吊挂物顶部,ObYb轴由右手法则确定。
通过绕ObXbYbZb的三轴旋转可以完成地轴系到体轴系的转化, 先绕ObZb轴旋转偏航角ψ, 再绕ObYb轴旋转俯仰角θ, 最后绕OeXe轴旋转滚转角ϕ, 可得到从地轴系到体轴系的转换矩阵
 (23)
(23)
其次建立吊挂物动力学方程, 将吊挂物视为六自由度刚体, 包含3个移动自由度Vx, Vy, Vz和3个转动自由度wx, wy, wz, 由牛顿第二定律可建立吊挂物的刚体运动方程组
 (24)
(24)
 (25)
(25)
式中:Fx, Fy, Fz分别为吊挂物体坐标系下的合力; Mx, My, Mz分别为吊挂物体坐标系下的合力矩, 其表达式为:
 (26)
(26)
 (27)
(27)
式中,下标aero为CFD求解的吊挂物气动力和气动力矩; 下标sli为吊索对吊挂物质心的力和力矩; 下标g为吊挂物重力。
姿态角与角速度之间满足运动学关系
 (28)
(28)
使用隐式积分方法求解动力学方程(24)式和(25)式, 可以得到吊挂物响应。
5 耦合CFD方法的吊挂物运动模拟方法
由于吊挂物是钝体, 作用在吊挂物上的气动力具有非定常特性, 随吊挂物的运动而不断变化。为了描述吊挂物运动过程的非定常特性, 在吊挂物的运动模拟中使用CFD方法计算吊挂物上的气动力和气动力矩, 并将其代入各吊挂物的六自由度非线性动力学方程中, 形成耦合CFD方法的吊挂物非线性、非定常的运动模拟方法。
此时, (26)式和(27)式可表示为
 (29)
(29)
 (30)
(30)
式中,下标CFDaero为吊挂物CFD模型中的体轴系下的气动力和气动力矩。
在吊挂物运动模拟过程中, 吊挂物的位置与形状随时间变化。具体步骤如下:
1) 将吊挂物初始状态输入CFD模型;
2) 计算得到该吊挂物本时间步气动力和气动力矩, 将该气动参数输入刚体动力学方程;
3) 求解该刚体动力学方程计算得到下一时间步的吊挂物位置。判断仿真是否完成, 若完成输出时间历程内的吊挂物响应; 若未完成使用嵌套网格技术更新吊挂物位置, 并返回步骤2)中再次求解。
6 吊挂物非线性运动与非定常气动载荷动态耦合特性分析
针对CONEX缩比模型的吊挂物静态及CONEX缩比模型动态耦合响应2种情况进行计算。
7 吊挂物与吊索参数
吊挂物参数见表 1, 该吊挂物模型为CONEX的11∶1缩比模型, 吊索初始长度为0.485 m, 吊索刚度是298 N/m, 吊索阻尼50 N·s/m。
吊挂物参数
8 缩比吊挂物无运动状态的非定常气动特性
即使不考虑吊挂物的运动, CFD中模拟钝体的流动也非常具有挑战性, 涉及到气流分离、再附着以及涡系的非定常脱落。因此, 在求解吊挂物响应之前, 先将无运动吊挂物的CFD计算数据与文献数据、试验数据对比[9], 分析侧滑角对气动力和气动力矩的影响, 进而通过流场分析引起上述影响的原因。
图 2给出了CFD吊挂模型随侧滑角变化导致的阻力系数、侧力系数和偏航力矩系数变化, 并通过与国外文献中的计算数据及风洞数据进行对比[9], 说明了该计算结果的可信度。
 |
图2 吊挂物平均气动力随侧滑角变化曲线 |
图 2中, 由于侧滑角为0°是宽面面向来流, 通过阻力系数对比图可以看出, 随着侧滑角增大, 吊挂物在来流方向的投影面积逐渐减小, 吊挂物阻力也随之减小。通过侧向力系数、偏航力矩系数对比图可以看出, 侧向力、偏航力矩随侧滑角先增大后减小。但侧滑角在80°左右时, 阻力系数、侧向力系数、偏航力矩系数均出现了反向变化现象。上述现象表明, 在侧滑角80°左右时, 吊挂物表面流动出现了明显变化, 这主要是由窄面迎风小角度变化时出现再附着效应导致, 如图 3所示。窄面迎风时, 随着侧滑角逐渐增加, 窄面边缘的流动边界层与吊挂物侧面尾部发生再附着, 气流在附着处作用表面压力, 使吊挂物侧向力小幅增加, 偏航力矩负向变化; 随着侧滑角进一步增加, 再附着区逐渐增加至覆盖整个侧面, 侧向力增加, 同时附着区表面压力中心前移, 偏航力矩正向增加。
 |
图3 吊挂物窄面迎风小角度变化时的再附着效应 |
9 缩比吊挂物运动响应
分别计算了40, 64 km/h来流速度时吊挂物运动响应变化, 初始状态攻角和侧滑角均为0°, 初始方向为窄面向前。运动响应包括吊挂物姿态角和后摆角、侧摆角、垂向位移、吊挂物气动力以及吊索拉力随时间的变化。
由于吊挂物是钝体, 尾流具有显著非定常效应, 若尾流未发展, 则初始状态下气动力是单向瞬时的冲击气动力, 导致计算结果不能完全体现非定常气动载荷的影响。为了避免冲击载荷对计算结果的不利影响, 本文在上述设置的初始状态基础上, 预留了0.15 s的尾流发展时间, 使吊挂物所处的非稳态气动环境特征充分体现, 此时才放开吊挂物运动自由度, 使吊挂物运动完全受非定常气动特性的影响。
1) 吊挂物姿态
图 4给出了该吊挂物姿态角在不同速度下随时间的变化曲线, 对比了40 km/h情况下文献[9]计算姿态角和本文计算姿态角度, 可以看出两者仅在计算前期有相位差异, 随着时间增大该差异显著减小, 总体结果良好。
 |
图4 不同速度下吊挂物姿态角随时间变化曲线 |
本文称吊挂物由窄面朝前到宽面朝前为NS-BS过渡。可以看出在吊挂物未完成NS-BS过渡时吊挂物俯仰角均随时间逐渐减小, 完成NS-BS过渡后俯仰角迅速减小且姿态极性会发生改变, 可以认为NS-BS过渡破坏了周期性的俯仰振荡。吊挂物偏航角随时间呈现周期变化且幅值逐渐增大, 当增大到临界值后, 会完成NS-BS过渡且之后稳定“打转”, 来流速度40 km/h相对于64 km/h,开始“打转”时间更晚。滚转角在NS-BS过渡之前呈现周期变化且幅值逐渐增大, 当NS-BS过渡之后幅值明显增大。
2) 吊挂物位移
图 5为该吊挂物后摆角、侧摆角在不同速度下随时间的变化曲线。可以看出吊挂物后摆角随时间明显呈周期变化且幅值有逐渐减小的趋势, 来流速度40 km/h,相对于64 km/h幅值更小。2种速度下吊挂物的侧摆角一开始随时间变化不大, 之后幅值均明显增大且呈现周期变化, 来流速度40 km/h相对于64 km/h,幅值更小,且后者幅值与前者相比大一量级, 可能是由于64 km/h时吊挂物的不稳定性引起的。垂向位移也呈周期变化, 幅值总体上逐渐减小, 不同速度的影响仅仅体现在幅值不同。
 |
图5 不同速度下吊挂物响应随时间变化曲线 |
3) 吊挂物气动特性
图 6为该吊挂物气动力和气动力矩在不同速度下随时间的变化曲线。可以看出2种速度下NS-BS过渡之前吊挂物气动力和气动力矩在平均值附近波动, 在NS-BS过渡之后, 气动力和气动力矩出现了明显的变化。气动力方面主要体现在阻力明显减小且出现了极性变化, 侧力明显增大, 升力变化不大。气动力矩方面主要体现在滚转力矩减小, 俯仰力矩均值减小, 由于计算时长限制, 40 km/h时俯仰力矩未完全体现减小的趋势。
 |
图6 不同速度下吊挂物气动力随时间变化曲线 |
4) 吊索拉力
图 7为该吊索拉力在不同速度下随时间的变化曲线。在来流速度40 km/h时, 发生NS-BS过渡之前吊索2和吊索3、吊索1和吊索4的拉力及其变化规律基本相同。在NS-BS过渡之后吊索1和吊索2、吊索3和吊索4的拉力及其变化规律相似。在来流速度64 km/h时, 由于吊挂物运动特征变化剧烈, 吊索拉力变化比40 km/h时更快。
 |
图7 不同速度下吊索拉力随时间变化曲线 |
10 结论
本文通过建立吊挂物CFD数值模型、吊索数学模型和吊挂物刚体动力学模型, 揭示了缩比吊挂物在2种来流速度(40 km/h和64 km/h)下的动力学响应特性, 重点分析了吊挂物NS-BS过渡(窄面-宽面姿态转换)对气动-运动的动态耦合行为的影响机制。
主要结论为: NS-BS过渡是吊挂物运动状态的分界点, 动态耦合下的运动失稳由NS-BS过渡主导。过渡前主要受气动阻力作用, 纵向摆动呈周期性衰减振荡, 但偏航角幅值持续增大; 当偏航角幅值增加至接近90°时, 发生NS-BS过渡, 此时阻力与侧力、滚转力矩和俯仰力矩快速交换, 发生气动载荷重分布, 导致纵向摆动振荡快速减弱, 但横向摆动幅值激增, 同时偏航角不再减小, 而是持续增加, 进入稳定“打转”模式。当速度从40 km/h提升至64 km/h时, 偏航角速率增加60%, 失稳时间提前40%, 振荡幅值增加150%。
未来的研究可以着眼于优化吊挂物气动外形对NS-BS过渡行为进行调控, 以减少其振荡幅值, 提高直升机吊挂飞行的安全性和稳定性。
References
- WANG Luofeng, CHEN Renliang. Effects of slung load on heavy lift helicopter air resonance stability[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(16): 152–162 (in Chinese) [Google Scholar]
- SAMPATH P. Dynamics of a helicopter slung load system[D]. Maryland: University of Maryland, 1980 [Google Scholar]
- SIMPSON A, FLOWER J W. lateral flutter of loads towed beneath helicopters and its avoidance[C]//6th European Rotorcraft and Powered Lift Aircraft Forum, Bristol, England, 1980 [Google Scholar]
- POLI C, CROMACK D. Dynamics of slung bodies using a single-point suspension system[J]. Journal of Aircraft, 1973, 10(2): 80–86 [Article] [Google Scholar]
- LAUB G H, KODANI H M. Wind tunnel investigation of aerodynamic characteristics[R]. NASA TM X-62169, 1972 [Google Scholar]
- CICOLANI L, KANNING G. A comprehensive estimate of the static aerodynamics of the 8 by 8 by 20 ft cargo container[R]. NASA TM-89433, 1987 [Google Scholar]
- CICOLANI L S, DA SILVA J, DUQUE E, et al. Unsteady aerodynamic model of a cargo container for slung-load simulation[J]. The Aeronautical Journal, 2004, 108: 357–368 [Article] [Google Scholar]
- THERON J N, CICOLANI L, DUQUE E P N. A CFD study of the aerodynamics of a 6×6×8 foot cargo container suspended beneath a helicopter part Ⅰ: aerodynamics of the stationary container[R]. TR-CR-AMR-AF-07-01, 2007 [Google Scholar]
- PROSSER D T, SMITH M. Navier-Stokes-Based Dynamic Simulations of Sling Loads[C]//54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, Massachusetts, 2013 [Google Scholar]
- PROSSER D T, SMITH M J. A novel, high fidelity 6-DoF simulation model for tethered load dynamics[C]//The AHS 70th Annual Forum, Montreal, Quebec, 2014 [Google Scholar]
- PROSSER D T, SMITH M J. Three-dimensional bluff body aerodynamics and its importance for helicopter sling loads[C]//40th European Rotorcraft Forum, Southampton, 2014 [Google Scholar]
- PROSSER D T, SMITH M J. A physics-based, reduced-order aerodynamics model for bluff bodies in unsteady, arbitrary motion[J]. Journal of the American Helicopter Society, 2015, 60(3): 1–15 [Google Scholar]
- PROSSER D T. Advanced computational techniques for unsteady aerodynamic-dynamic interactions of bluff bodies[D]. Atlanta, Georgia: Georgia Institute of Technology, 2015 [Google Scholar]
- MA Chao, CAO Yihua, XU Zhongda, et al. Numerical simulation of helicopter slung-load flow field and fins design[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(5): 654–658 (in Chinese) [Google Scholar]
- WU Gang. Analysis of heavy lift helicopter slung-load flow field and flight characteristics based on CFD method[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013 (in Chinese) [Google Scholar]
All Tables
All Figures
|
图1 吊索模型示意图 |
| In the text | |
|
图2 吊挂物平均气动力随侧滑角变化曲线 |
| In the text | |
|
图3 吊挂物窄面迎风小角度变化时的再附着效应 |
| In the text | |
|
图4 不同速度下吊挂物姿态角随时间变化曲线 |
| In the text | |
|
图5 不同速度下吊挂物响应随时间变化曲线 |
| In the text | |
|
图6 不同速度下吊挂物气动力随时间变化曲线 |
| In the text | |
|
图7 不同速度下吊索拉力随时间变化曲线 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.