| Issue |
JNWPU
Volume 38, Number 5, October 2020
|
|
|---|---|---|
| Page(s) | 1038 - 1046 | |
| DOI | https://doi.org/10.1051/jnwpu/20203851038 | |
| Published online | 08 December 2020 | |
Ground Test and Numerical Simulation on Ground Effect of Ducted Propeller System
涵道螺旋桨地面效应试验与数值计算研究
1
School of Aeronautics, Northwestern Polytechnial University, Xi'an 710072, China
2
Navigation and Control Technology Research Institute of Norinco Group, Beijing 100089, China
Received:
10
December
2019
Abstract
The aerodynamic performances of a ducted propeller system applied in a manned vertical takeoff and landing aircraft considering the ground effect are investigated. Based on the ground test and CFD simulation combined with sliding mesh technique, the thrust and power characteristics of the ducted propeller under different heights between the duct and ground are compared and analyzed, and the influence mechanism of the ground effect on the aerodynamic performance of the ducted propeller is detailed analyzed based on the CFD simulation results. The test and simulation results show that, the ground near the ducted propeller leads to a high-pressure zone to block the jet flow through the outlet of the duct, while an upward rebounded flow with the vortex rings is also generated to affect the aerodynamic forces and powers of both the duct and propeller. As the influence of the high-pressure zone, the thrust of the propeller increases. However, the thrust of the duct decreases when the rebounded flow is inhaled again into the duct. With the increase of the heights between the ground and the ducted propeller, the ground effect is weakened, and the power of the system recovers more quickly than the thrust. In general, the ground effect seriously affect the aerodynamic efficiency of the ducted propeller in near ground hover state, which should be mainly considered in the process of aerodynamic and conceptual design.
摘要
开展了载人垂直起降飞行器使用的涵道螺旋桨系统在地面效应影响下的气动特性分析研究工作。基于地面试验和结合滑移网格技术的CFD方法,对比分析了不同近地高度下的涵道螺旋桨拉力和功率特性,并通过CFD计算结果较为详细地揭示了地面效应的影响机理。结论表明,地面的存在形成了阻滞涵道出口喷流的高压区和向上的反弹气流,共同影响了整体的气动特性,使得系统的整体拉力减小,所需功率增大。受高压阻滞气流影响,螺旋桨拉力增大,而反弹涡环吸入唇口后,减小了涵道的拉力。随着近地高度的增大,地面效应影响减弱,且功率恢复较快,而整体拉力恢复相对滞后。综合来看,地面明显地影响了涵道螺旋桨系统近地悬停状态的气动效能,需要在进行气动和总体方案设计时予以重点考虑。
Key words: duct / propeller / boundary conditions / computer simulation / turbulence models / ground effect / sliding mesh / CFD / ground test
关键字 : 涵道 / 螺旋桨 / 流场特性 / 数值模拟 / 地面效应 / 滑移网格 / 计算流体力学 / 地面试验
© 2020 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
涵道螺旋桨是一种将传统螺旋桨置于圆环形涵道内所构成的提供推(拉)力或升力的推进装置,其结构紧凑,气动噪声低,使用安全性好,在同样功耗下较相同直径的孤立螺旋桨可产生更大的气动力。因为涵道螺旋桨的这些独特优势,其被广泛应用于地面效应飞行器、微小型垂直起降飞行器和最新的城市空运电动垂直起降飞行器等[1-3]。
因为涵道和螺旋桨之间的相互影响,涵道螺旋桨的气动特性比较复杂, 特别是在有横向来流的情况下。美国NASA研究中心在20世纪60年代针对涵道螺旋桨在倾转涵道垂直起降飞行器上的应用,进行了一系列的风洞试验研究,获得了大量的试验数据[4-8]。针对涵道螺旋桨在微小型垂直起降无人机上应用,Abrego、Jonathan、Martin、Graf等开展了微小型涵道螺旋桨的风洞试验研究,并使用油流、PIV等流场显示技术,对涵道内部的流动细节进行了分析,研究了涵道形状、桨叶壁面间隙等对涵道螺旋桨轴向性能(悬停,垂直上升和下降)和前飞性能的影响[9-12]。李建波等[13-14]针对一种短涵道无人飞行器开展了涵道风扇风洞试验研究,得出前飞时涵道阻力较大,涵道风扇若作为升力装置仅适用于强调悬停和低速飞行性能的飞行器的结论。随着计算流体力学(CFD)方法的发展,国内外开始广泛地使用CFD方法开展涵道螺旋桨气动特性分析研究及优化设计[15-17]。许和勇、苏运德等[18-20]应用非定常Euler方程数值模拟对比研究了涵道螺旋桨与孤立螺旋桨气动性能,分析了桨尖间隙和双桨间距对共轴双螺旋桨涵道的气动性能的影响。杨磊、李晓华、邓阳平、蔡红明等[21-24]使用基于滑移网格技术的非定常计算方法,通过求解Navier-Stokes(N-S)方程对涵道螺旋桨不同状态的气动力进行了数值模拟,分析了倾转过程、涵道本体、螺旋桨位置、飞行速度、螺旋桨转速等对涵道螺旋桨系统非定常气动特性的影响。
涵道螺旋桨在垂直起降飞行器上的大量应用使得研究人员开始关注地面效应对其气动性能的影响,在这方面也开展了相关的研究工作。Han等通过试验和CFD仿真研究了单桨涵道在地面、天花板以及竖直壁面等环境下的气动特性;韩翰等[25-26]通过台架试验研究了单螺旋桨和共轴涵道双螺旋桨在近地面时的气动特性,并应用数值计算方法对涵道螺旋桨地面效应气动特性的产生机理进行了分析,但所研究的涵道尺寸小、螺旋桨桨尖马赫数低,只适用于微小型飞行器,对于大型涵道式垂直起降飞行器的借鉴意义有限。因而,对于大型涵道螺旋桨,其地面效应的影响规律、机理等尚需要开展大量的研究工作。
本文以用于载人垂直起降飞行器的大型涵道螺旋桨为研究对象,通过地面台架试验,研究涵道出口与地面之间的间距(近地距离)对涵道螺旋桨拉力以及驱动功率的影响,并使用高精度的CFD数值仿真技术,开展CFD计算结果与试验结果的对比验证工作。基于CFD计算得到的流场结果,详细研究分析地面效应对涵道螺旋桨系统的影响机理。
1 试验方案
1.1 涵道螺旋桨模型
试验用涵道螺旋桨系统的涵道壳体为木质结构, 而四片桨叶为保证外形精度和强度, 采用金属加工而成, 根部为圆柱形并由中心金属盘夹紧, 手动调节桨距(见图 1)。螺旋桨桨叶使用ARAD系列翼型(见图 2), 翼根到翼尖的扭转角为ϕ=20°, 涵道外形以美国NASA测试的涵道为原型[6], 经过扩放修改而来, 具体外形见图 3。最终本文的试验涵道螺旋桨系统外形参数见表 1。
 |
图1 四叶螺旋桨试验模型 |
 |
图2 螺旋桨桨叶翼型及扭转 |
 |
图3 涵道外形示意 |
涵道螺旋桨试验模型参数
1.2 模型安装
试验用涵道螺旋桨系统的安装如图 4所示, 螺旋桨由一台安装在整流罩内的大功率中频电机驱动, 电机与涵道螺旋桨一起水平固定安装在金属平台上, 金属平台再安装在框式测力天平的上部, 由天平测量整个涵道螺旋桨系统的拉力。在涵道出口外侧垂直安装有一块2 m×4 m大小的木质平板用于模拟地面, 其距离涵道出口的距离可以手动调节。进而模拟不同的涵道距地面高度。
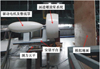 |
图4 试验模型安装 |
1.3 试验设备及数据采集
试验使用六分量盒式天平测量涵道螺旋桨系统整体性能, 天平的具体技术参数如表 2所示。采集时主要使用X分量, 测量涵道螺旋桨整体的拉力。
盒式天平性能指标
试验数据采集使用VXI数据采集系统, 其主要指标如下:①通道数:32;②A/D位数:16位; ③采集速度:不小于100 kHz/通道; ④配备相应的放大器和低通滤波器, 滤波截止频率10~2×104 Hz可调, 有2×104, 1×104, 5 ×104, 2×104, 1×104, 500, 200, 100, 50, 20, 10 Hz共11个档; ⑤缓存长度2 Msa/通道。
试验记录了试验电压和电流, 用以计算涵道螺旋桨桨的驱动电机的输入功率, 然后根据电机效率等参数计算得到输出功率。电压表使用的是MF35型万用电表。MF35型万用电表是一种高精度多量限的携带式仪表, 可以分别测量直流电流、电压, 交流电流、电压, 直流电阻和音频电平。电流表使用的是VIVTOR6056E型电流表。VICTOR6056E是一种性能稳定, 安全、可靠的3 3/4位交直流数字钳形表, 可用于测量交直流电压、交直流电流、电阻、二极管、电路通断、频率等。试验使用红外数字转速仪测量转速, 试验用红外数字转速仪可精确到1 r/min。
1.4 数据处理
涵道螺旋桨系统拉力及驱动功率按以下公式无因次化处理为拉力系数CT和功率系数CP, 式中T和P分别表示拉力和驱动功率, ρ为空气密度, n为旋转速度, D为涵道内径。
 1
1
 2
2
2 数值计算方法
2.1 控制方程
本文使用的控制方程为积分形式的三维可压缩非定常N-S方程, 其表达式为
 3
3
式中:V为任意控制体;W是守恒变量;F为无黏(对流)通矢量项;Fv为黏性通量;∂V为控制体的边界;n为控制体边界单位外法向矢量;Re为计算的雷诺数。
计算使用的程序为ANSYS CFX, 湍流模型为对逆压梯度流动模拟精度较高的k-ω SST(切应力输运)模型[14], 空间离散使用二阶high resolution方法。
2.2 滑移网格技术
桨叶与涵道之间存在强烈的气动干扰, 本质上这种影响作用呈现高度非定常特性。准确捕捉这种非定常特性的基础就是对螺旋桨转动引起的非定常气动效应的准确计算, 本文采用滑移网格技术[27]来模拟螺旋桨的旋转运动。滑移网格将计算域分为动静区域, 两者之间使用滑移交界面进行连接, 交界面实际上是一对形状完全相同的几何面, 动域网格整体沿着交界面进行运动。由于交界面上的网格不需要对齐, 通量传递通过节点之间的信息插值实现, 极大地方便了复杂模型的仿真分析。其基本原理见图 5。
 |
图5 滑移网格技术 |
3 计算模型与网格
数值仿真模型与实际试验模型稍有区别, 主要是简化删除了桨毂。按照本文的计算方法, 将涵道所在流场域划分为静止域和旋转动域2个区域, 两者之间使用交界面(interface)来插值传递数据。需要注意的是, 由于旋转域中包含了部分的涵道内部面, 在给旋转域施加旋转速度时也会在该面上附加速度, 但是实际上它是静止的, 所以设置边界是要额外给该面附加反向旋转速度来抵消旋转效应。外场边界为开口边界, 该边界既允许气流流入也允许流出, 地面设置为静止壁面。详细边界条件设置见图 6。
 |
图6 边界条件设置 |
计算网格使用对外形适应性较好的非结构网格(见图 7)。文献[23]指出, 附面层对涵道螺旋桨的气动性能影响明显, 因此本文在划分计算网格时, 在所有的壁面上均设置了附面层。首层网格高度取为1×10-6 m, 对应的壁面平均y+≈1.1。在涵道入口、出口以及桨叶前后缘、桨尖等部位进行网格加密, 最终划分总网格量为1 500万, 其中外部静止域800万, 内部旋转域700万。
 |
图7 计算网格 |
4 结果分析
使用本文的计算方法对不同近地高度下的涵道螺旋桨气动特性进行数值计算, 并与试验值进行对比。尽管近地高度不同, 但由于海拔高度差别不大, 所以大气参数均取为海平面, 也即ρ=1.225 kg/m3, 转速n=5 900 r/min, 对应的桨尖马赫数为0.6, 近地距离分别取为H/D=0.176, 0.235, 0.303, 0.455以及无地板情形, 其中, D为涵道内径, H为涵道出口与模拟地板之间的实际距离。计算得到的涵道螺旋桨系统的拉力以及相应的功率变化分别见图 8。
 |
图8 不同近地高度下的涵道螺旋桨气动特性计算与试验值对比 |
图 8显示在各个桨距角下,计算得到的拉力和功率值与试验吻合得较好,最大误差不超过13%。试验时涵道螺旋桨前部的整流罩的尺寸较大(直径330 mm,长度1 000 mm),可以对涵道系统的性能产生影响,因此计算误差有一部分来源于该简化过程。如能加以考虑,计算精度还可以进一步提高。
近地高度比较小时,流场比较复杂,计算结果的吻合程度稍差,随着近地距离的增加,计算值与试验值的一致性更好。除此之外,模型的简化也是误差来源之一。随着桨距角的增大,涵道螺旋桨系统的拉力增大,功率增大,并且拉力、功率与桨距角的变化关系近似为线性。这主要是因为在所取的桨距角范围内,螺旋桨表面并未发生大范围的流动分离,仅是桨距角在基准上增大4°后,桨尖上部出现局部的分离流动,但是全局流动特性基本上还是表现为线性(见图 9)。
 |
图9 桨叶表面极限流线 |
从图 8可以看出,涵道螺旋桨系统下方放置地面后,地面的存在使得涵道螺旋桨系统的整体拉力减小,并且所需要的功率增大,也就是说地面的存在使得涵道螺旋桨的性能和效率下降。其原因可以从涵道和螺旋桨两部分来进行分析。涵道螺旋桨系统产生拉力的部件主要为螺旋桨和涵道本身,其中螺旋桨由于桨叶的上下翼面压差产生升力,而涵道则是因为螺旋桨气流被环箍在管道内部,流管先收缩,然后经过涵道后端扩张产生类似喷流的效果,从而间接的产生拉力。由于处于静止状态,涵道本身并不会产生扭矩,整个系统的扭矩来源主要是从螺旋桨旋转产生,也就是说整体系统耗费的功率都是为了驱动螺旋桨。引入地面效应后,涵道出口的喷流受到阻滞,在地面与涵道螺旋桨系统之间形成一个“高压区”,也正是这个高压区的存在,影响了涵道和螺旋桨的气动特性。
图 10显示了不同桨距角下的分部件拉力情况。可以看出,相比无地面理想情形,在近地面情况下,同一桨距角下的涵道拉力下降,而螺旋桨的拉力增大,但是由于涵道损失的拉力过多,总的拉力仍表现为减小趋势。涵道的拉力显著减小与高压气流反弹形成的“涡环(vortex ring)”相关,如图 10所示。
 |
图10 分部件拉力计算值 |
由于涵道出口的尾喷流存在斜射现象,因此会在撞击地面后产生部分反弹气流,受到唇口低压区域的吸引,形成位于涵道外部的“涡环”(见图 10)。该涡环本质上是一种次生的低能量流体,耗费了系统的能量。涵道自身因为该气流的影响,其前缘吸力峰降低,产生的拉力减小。而螺旋桨的拉力增大一方面是由于地面效应引起的“高压区”引起了下翼面压力的增大,另一方面也与吸入的“涡环”相关,因为流量有所增加,因此上翼面的吸力有所增大,扩大了上下翼面的压力差,最终使得螺旋桨的拉力提高(见图 11至13)。但是这种増升作用付出了功率的代价,反弹气流要被吸入涵道内部,需要螺旋桨做功克服其反弹速度,所以多数情况下同样的桨距角下,地面效应影响下的涵道螺旋桨使用功率较无地面干扰要大。由此也可以看出,地面的存在对涵道螺旋桨的效能产生了不利影响,它显著地减少了总拉力并增大了所需驱动功率,在进行该类飞行器设计时需要充分考虑地面效应影响下的动力需求。
 |
图11 有无地面干扰时的空间流线 |
 |
图12 有无地面干扰时的截面压力云图 |
 |
图13 涵道螺旋桨系统截面压力分布(H/h=0.2,该压力系数基于涵道入口处气流性质计算得到) |
图 14显示了不同桨距角增量时的拉力和功率随着近地高度增加的关系图。可以看出随着近地高度的增加,地面效应对涵道螺旋桨系统的拉力和功率的影响都在减小,且对拉力的影响程度衰减较功率要慢。当近地高度为H/D=0.303或0.455时,整体拉力与无地面差别依然较大,但是功率已经基本上接近。其原因是,功率主要由螺旋桨产生,其影响效果受地面高压区和反弹的涡环共同影响,近地高度增大后,高压区减弱较快,而涡环的变化相对较慢,因此螺旋桨的功率恢复较快,而涵道受影响较大,性能恢复相对滞后。
 |
图14 涵道螺旋桨气动力计算值随近地距离变化 |
5 结论
本文以用于载人垂直起降飞行器的大型涵道螺旋桨升力系统为研究对象,通过地面试验和CFD计算验证2种途径,对不同近地高度下的涵道螺旋桨气动特性进行了验证分析,得到的主要结论有:
1) 基于滑移网格技术的CFD计算方法能够较为准确地计算获取地面效应影响下的涵道螺旋桨气动特性,拉力和功率与试验值吻合较好,表明该方法的有效性;
2) 地面效应使得涵道螺旋桨的气动特性相比无干扰状态有所损失,整体拉力减小,所需功率增加;
3) 地面效应引起的气流阻滞产生的高压区是引起螺旋桨拉力增大的主要原因,而对涵道来讲,其拉力减小的原因主要是反弹气流再吸入引起的唇口吸力峰减弱;
4) 随着近地高度的增加,地面效应的影响逐渐减弱,且功率恢复较快,而整体拉力的恢复相对滞后。
由于大型涵道螺旋桨流动现象复杂,与常规螺旋桨存在很大差异,本文的工作只是初步揭示了地面效应在该动力装置中的影响作用,后续仍需要进行大量的数值计算和试验验证对比工作,深入分析其影响机理,指导总体方案的设计工作。
References
- Xu Dekang. Airbus's Urban Mobility Plans[J]. International Aviation, 2017, (8): 77– 79 [Article] (in Chinese) [Google Scholar]
- Liu Zheng, Wu Hao. Development Status and Prospect of Urban Air Transport[J]. International Aviation, 2018, (9): 38– 42 [Article] (in Chinese) [Google Scholar]
- Lin B. Urban Air Traffic is on the Rise[J]. International Aviation, 2019, (4): 53– 55 [Article] (in Chinese) [Google Scholar]
- Paul F Y, Kenneth W M. A Wind-Tunnel Investigation of a 4-Foot-Diameter Ducted Fan Mounted on the Tip of a Semispan Wing[R]. NASA TN D-776 1961 [Google Scholar]
- Paul F Y. Aerodynamics of a Tilting Ducted Fan Configuration[R]. NASA TN D-785 1961 [Google Scholar]
- Grunwald K J, Goodson K W. Aerodynamic Loads on an Isolated Shrouded-Propeller Configuration for Angles of Attack Form -10° to 10°[R]. NASA TN D-995 1962 [Google Scholar]
- Goodson K W, Grunwald K J. Aerodynamic Characteristics of a Powered Semispan Tilting-Shrouded-Propeller Vtol Model in Hovering and Transition Flight[R]. NASA TN D-981, 1962 [Google Scholar]
- Kenneth W M. Performance Characteristics of a 4-Foot-Diameter Ducted Fan at Zero Angle of Attack for Several Fan Blade Angles[R]. NASA TN D-3122 1965 [Google Scholar]
- Abrego A I, Bulaga R W. Performance Study of a Ducted fan System[C]//American Helicopter Society Aerodynamics, Acoustics, and Test and Evaluation Technical Specialists Meeting, San Francisco, 2002 [Google Scholar]
- Jonathan F, Troy J. Improving Control System Effectiveness for Ducted Fan VTOL UAV Operating in Crosswinds[R]. AIAA-2003-6514 [Google Scholar]
- Martin P, Tung C. Performance and Flowfield Measurements on a 10-Inch Ducted Rotor VTOL UAV[C]//60th Annual Forum of the American Helicopter Society, Alexandria, 2004 [Google Scholar]
- Graf W, Fleming J, Wing N. Improving Ducted Fan UAV Aerodynamics in Forward Flight[R]. AIAA-2008-430 [Google Scholar]
- Li Jianbo, Gao Zheng. Aerodynamic Characteristics Analysis of Ducted Fan[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2005, 37 (6): 680– 684 [Article] (in Chinese) [Google Scholar]
- Li Jianbo, Gao Zheng, Tang Zhengfei, et al. Experimental Investigation on Lift and Drag of Ducted Fan System[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2004, 36 (2): 164– 168 [Article] (in Chinese) [Google Scholar]
- Tu Qiuye, Tang Diyi. A Numerical Model for Duct Fan Vortex Intensity[J]. Journal of Aerospace Power, 2002, 17 (2): 192– 195 [Article] (in Chinese) [Google Scholar]
- Tu Qiuye, Wang Xiaofeng, Chen Hongcui, et al. The Duct Fan Design and Test for WIG Craft[J]. Journal of Aerospace Power, 2004, 19 (6): 798– 801 [Article] (in Chinese) [Google Scholar]
- Wang Haipeng, Wang Huaming. A General Summarize for the Ducted Fan Computational Methods[C]//The 22nd Helicopter Conference, 2006(in Chinese) [Google Scholar]
- Xu Heyong, Ye Zhengyin. Numerical Simulation and Comparison of Aerodynamic Characteristics between Ducted and Isolated Propellers[J]. Journal of Aerospace Power, 2011, 26 (12): 2820– 2825 [Article] (in Chinese) [Google Scholar]
- Xu Heyong, Ye Zhengyin. Numerical Simulation of Ducted-Propeller System Using Unstructured Overset Grids[J]. Acta Aerodynamica Sinica, 2013, 31 (3): 306– 309 [Article] (in Chinese) [Google Scholar]
- Su Yunde, Ye Zhengyin, Xu Heyong. Influence of Tip Clearance and Propeller Separation Space on Aerodynamic Performance of Ducted Propeller[J]. Journal of Aerospace Power, 2014, 29 (6): 1468– 1475 [Article] (in Chinese) [Google Scholar]
- Yang Lei, Ye Zhengyin. Unsteady Aerodynamic Force of Tilt Ducted Fan during Transition Period[J]. Journal of Aerospace Power, 2015, 30 (1): 155– 163 [Article] (in Chinese) [Google Scholar]
- Li Xiaohua, Guo Zheng, Chen Qingyang. Numerical Simulation of Ducted Rotor's Aerodynamic Characteristics[J]. Journal of National University of Defense Technology, 2015, 37 (4): 31– 35 [Article] (in Chinese) [Google Scholar]
- Deng Yangping, Mi Baigang, Zhang Yan. Research on Numerical Calculation for Aerodynamic Characteristics Analysis of Ducted Fan[J]. Journal of Northwestern Polytechnical University, 2018, 36 (6): 26– 32 [Article] (in Chinese) [Google Scholar]
- Cai Hongming, Ma Guoliang, Li Zhongxin, et al. Unsteady Aerodynamic Characteristics of Ducted Coaxial Propeller Unmanned Aerial Vehicle[J]. Journal of Aerospace Power, 2019, 34 (8): 1699– 1707 [Article] [Google Scholar]
- Han Han, Xiang Changle, Xu Bin. Aerodynamic Performance of Shrouded Coaxial Anti-Rotating Rotor Propulsion Unit with Ground Effect[J]. Journal of Aerospace Power, 2019, 34 (7): 1440– 1449 [Article] (in Chinese) [Google Scholar]
- Han H, Xiang XU B, et al. Aerodynamic Performance and Analysis of a Hovering Micro-Scale Shrouded Rotor in Confined Environment[J]. Advances in Mechanical Engineering, 2019, 11 (4): 1– 21 [Article] [Google Scholar]
- Mi B G, Zhan H. Numerical Simulation of the Static and Dynamic Aerodynamics of a UAV under Wake Flows[J]. Journal of Advanced Transportation, 2019, 2019: 1– 12 [Article] [Google Scholar]
All Tables
All Figures
|
图1 四叶螺旋桨试验模型 |
| In the text | |
|
图2 螺旋桨桨叶翼型及扭转 |
| In the text | |
|
图3 涵道外形示意 |
| In the text | |
|
图4 试验模型安装 |
| In the text | |
|
图5 滑移网格技术 |
| In the text | |
|
图6 边界条件设置 |
| In the text | |
|
图7 计算网格 |
| In the text | |
|
图8 不同近地高度下的涵道螺旋桨气动特性计算与试验值对比 |
| In the text | |
|
图9 桨叶表面极限流线 |
| In the text | |
|
图10 分部件拉力计算值 |
| In the text | |
|
图11 有无地面干扰时的空间流线 |
| In the text | |
|
图12 有无地面干扰时的截面压力云图 |
| In the text | |
|
图13 涵道螺旋桨系统截面压力分布(H/h=0.2,该压力系数基于涵道入口处气流性质计算得到) |
| In the text | |
|
图14 涵道螺旋桨气动力计算值随近地距离变化 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.