| Issue |
JNWPU
Volume 42, Number 4, August 2024
|
|
|---|---|---|
| Page(s) | 616 - 624 | |
| DOI | https://doi.org/10.1051/jnwpu/20244240616 | |
| Published online | 08 October 2024 | |
Hydrodynamic and kinematic characteristics of high-speed inclined water-exit process in wave environment
波浪环境下水下航行体高速倾斜出水流体动力与运动特性研究
1
School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China
2
Shanxi Pingyang Industry Machinery Co., Ltd, Houma 043099, China
3
Marine Design & Research Institute of China, Shanghai 200011, China
4
State Grid Huaibei Power Supply Company, Huaibei 235000, China
5
Xi'an Tianhe Defense Technology Co., Ltd, Xi'an 710000, China
Received:
3
August
2023
Abstract
Aiming at the process of underwater vehicle crossing the water-air interface based on the computational fluid dynamics(CFD) method, integrating the volume of fluid(VOF) and dynamic fluid body interaction(DFBI) models, a numerical simulation method for the trans-media process in a wave environment was studied. The motion simulation method of underwater vehicle under the action of complex fluid environment was established. The simulation of the water-exit process of the underwater vehicle in a wave environment has been realized. The accuracy verification of the wave-making and trans-media processes has been completed. The hydrodynamic and kinematic characteristics of the vehicle during the water-exit process have been obtained. The influences of the wave phase and velocity on the force and motion characteristics of the underwater vehicle were obtained, which provides technical support for designing the unmanned vehicles.
摘要
针对水下航行体跨水空交界面过程, 基于CFD方法, 结合VOF与DFBI模型, 建立了复杂构型航行体穿越波浪环境的高精度数值模拟模型, 实现了波浪环境下复杂构型航行体出水过程模拟, 完成了造波和跨介质过程的模拟精度验证, 得到了航行体出水过程中的流体动力和运动特性, 获得了波浪相位、运动方式等对航行体的受力和运动特性的影响规律, 为跨介质无人航行体设计提供技术支撑。
Key words: underwater vehicle / water-exit / wave / numerical simulation / hydrodynamics
关键字 : 水下航行体 / 出水 / 波浪 / 数值模拟 / 流体动力
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
现代战争模式正随着军事科技的发展发生着翻天覆地的变化, 作战方式开始向海陆空天多维一体化转变。跨介质航行体的运动方式类似于打水漂运动, 在远洋海域发射后利用水下与水面交替运动的方式躲避敌方探测, 兼顾隐蔽性与机动性, 能够对水面与水中目标进行高效精准打击[1–2]。海面附近的流体受到风或气压变化的影响, 在平衡位置附近做周期运动, 导致波面在波峰与波谷之间的时间与空间维度交替出现, 形成了典型的波浪环境。波浪的传播方向通常保持相对稳定, 但影响随着流体运动会传递至水下一段距离[3]。波浪环境会导致航行体在出水过程中水动力特性具有强烈的非定常与非线性特性[4]。因此, 对航行体在波浪环境中入水进行建模与研究具有重要工程意义与理论价值。
CFD方法通过求解N-S方程组对流体运动进行计算, 可以很好地对流场中所有信息进行分析, 具有可重复性高、成本低、全尺寸分析等优点, 是一种重要的科研手段[5]。
Chu等[6]针对圆柱体的出水问题, 利用数值模拟方法对自由表面与空腔相互作用过程进行了系统研究, 分析了空泡溃灭瞬间的高压特性。Qin等[7]研究了潜射航行体出水过程中的气泡分布, 获得了气泡的演化过程。袁绪龙等[8]针对主动攻击型潜载武器命中率低的问题, 提出了出水攻击的方案, 建立了潜载航行体出水弹道的模型, 设计了详细弹道并进行了分析。王瑞臣[9]利用ANSYS/LS-DYNA软件分析了水深和波浪角对弹体出水姿态的影响, 研究表明波浪周期、波长、波幅、深度和波浪方向等参数均对航行体出水姿态有较大影响, 其中浅水出水更容易受到波浪环境的影响。王亚东等[10]基于Pireson-Moscowitz频谱和SWOP方向分布函数建立了不规则数值波浪水池, 并利用切片理论对波浪力进行了计算, 结合蒙特卡罗法思想得出了水深出水弹道参数最大偏差的影响。Hou等[11]利用空化模型与Mixture多相流模型对潜载航行体同轴发射进行了模拟, 模型计入了流体的可压缩性。杨继锋等[12]使用ANSYS/FLUENT求解器对水下发射环境和导弹运动进行了数值建模, 通过对导弹运动特性的分析和环境特点的研究, 综合分析了导弹发射过程中压力、速度等参数和波浪对导弹运动姿态的影响规律。Gao等[13–14]对连续发射弹丸的水动力学特性与流动干扰问题进行了系统研究。Shi等[15]对航行体出水过程的空化力学进行了研究, 并探讨了弹体载荷特性。
王之海等[16]以ITTC双参数谱为目标, 通过CFD方法建立了一个非规则波浪数值水池, 并利用谱分析方法进行了精度验证。在此基础上, 对非规则波作用下水下航行体出水过程进行了数值模拟, 获得了长峰非规则波对航行体出水姿态的影响规律。刘可等[17]利用Stokes波浪理论建立了波浪数值水池, 结合CFD动网格技术对航行体出水过程进行了研究, 分析了相位对航行体出水姿态的影响, 计算得到了影响最严重的出水相位。崔奇伟等[18]利用ANSYS/LS-DYNA有限元动力分析软件建立了潜射导弹出水过程的流体动力学模型, 模拟了不同波浪环境下航行体姿态变化情况, 研究表明波浪浪级的增加会显著增加航行体的水动力载荷。张重先[19]对小型导弹出水过程进行了模拟研究, 利用Morison公式提出了波浪扰动条件下导弹出水的动力学模型, 获得了弹体运动和波浪之间耦合关系对波浪环境和航行体的影响。权晓波等[20]将二阶Stokes波的条件耦合至数值水池中, 建立了波浪环境中航行体出水问题, 并研究了航行体轴向力、横向力等流体动力学特性。
综上所述,本文针对波浪环境下无人航行体出水过程开展数值模拟研究, 基于五阶Stokes波浪理论建立了强非线性波浪数值水槽, 建立复杂流体作用下航行体的高速运动模型, 获得波浪环境对航行体出水的影响规律理, 为跨介质航行体设计提供理论与技术支撑。
1 数值模拟方法
1.1 波浪理论
理论是波浪数值水槽的基础, 受波浪波高、波长与水深等参数的影响, 波浪理论适用范围不同。波浪环境中自由液面流体质点在垂直方向上满足
 (1)
(1)
此外, 流体运动速度满足关系式
 (2)
(2)
联立(1)~(2)式可得自由液面的运动学边界条件
 (3)
(3)
自由液面处的压强为大气压强, 动力学边界条件为
 (4)
(4)
Stokes V波浪理论中的波面公式为
 (5)
(5)
式中,θ=kx-ωt[21]。
1.2 数值理论基础
1.2.1 流体流动控制方程
Stokes V波浪理论均基于无黏无旋的势流理论对波浪进行描述, 缺乏对海水黏性项的考虑, 而黏性项是导致波浪衰减最重要的因素之一。同时基于势流理论的模拟难以对航行体跨介质过程的复杂流体环境进行研究。因此, 以基于势流理论的解析解作为CFD数值水槽的边界条件或初始条件, 经过演化后得到满足计算要求的波浪环境。考虑到航行体水中运动的速度较大, 研究计入了海水的可压缩性。本研究中数值模拟的控制方程包含连续性方程、动量方程与能量方程。连续性方程为
 (6)
(6)
动量方程为
 (7)
(7)
能量方程为
 (8)
(8)
式中:ui为速度;t为时间;p为压力;τij是应力张量;S为动量方程源项;T为温度;λ为导热系数;cp为常数;ST为能量方程源项;ρm为混合密度。
 (9)
(9)
式中,αi和ρi为不同相的体积分数与密度。
1.2.2 造波与消波
造波与消波是波浪水槽最重要的环节之一, 会直接影响波浪环境的生成与质量。数值模拟中常用的造波方法有推板法、速度入口(边界条件)法和造波源法。其中推板法造波需要对物理过程进行模拟, 涉及网格运动等复杂问题, 同时需要考虑波浪环境与推板运动的相互关系。造波源造波需要在控制方程中增加源项, 且对造波公式有较大限制。而采用速度入口造波法可以直接将速度与相分布植入至入口边界, 可以更好地对波浪进行调节, 因此本研究采用速度入口造波方法。
波浪传播的距离远超过数值水槽的长度, 导致波浪会在水槽尾部发生反射, 对水槽内部传播的波浪产生污染, 导致波致速度场的不规则变化与波浪变形甚至破碎, 因此需要通过数值方法进行消波操作。本文利用阻尼法进行消波, 阻尼法由于结构简单且效果明显, 受到众多学者欢迎, 本文采用的是指数形式的阻尼消波方法。方程形式为
 (10)
(10)
1.2.3 湍流模型
k-ω SST湍流模型兼顾了k-ω和k-ε模型的优点, 具有较好的适用范围与计算精度。k-ω SST湍流模型需要对湍动能k和单位耗散率ω的输运方程进行求解, 以确定湍流涡黏度, 输运方程为
 (11)
(11)
 (12)
(12)
式中:U为平均速度;μ为动力黏度;σk, σω和β*为模型系数; fβ*为自由剪切修正因子; fβ为涡流延伸修正因子; β为热膨胀系数; Sk和Sω为源项; k0和ω0为阻止湍流衰减的环境湍流值; μt为湍流黏度; Pk和Pω为结果项。
1.2.4 多相流模型
航行体高速出水涉及空气、水和水蒸汽相互作用等多相流动问题, 需要引入多相流模型捕捉相界面。欧拉-欧拉和欧拉-拉格朗日是最常用的2种多相流模型, 其中欧拉-拉格朗日模型适用于模拟连续流体和离散粒子, 如柴油机燃烧、煤炭颗粒和粒子负载流动等, 欧拉-欧拉方法将不同相处理为连续流体, 引入相体积分数(phasic volume fraction)描述不同相所占据的体积, 在同一欧拉网格内体积分数之和为1。体积分数α的输运方程为
 (13)
(13)
1.2.5 空化模型
大部分空化模型均基于Rayleigh Plesset方程, 具有代表性的有Kubota、Singhal、Schnerr-Sauer、Gerber和Zwart空化模型。本文中采用的Schnerr-Sauer空化模型计算公式为
 (14)
(14)
式中:Ncav为空化数;p为流场压力;psat为饱和蒸汽压;ρl为液体密度。
1.3 数值模型与验证
1.3.1 计算域设置
航行体出水过程计算域如图 1所示, 大小为7.5 m×4.8 m×1.6 m, 左侧为速度入口, 右侧为压力出口, 上、下、前、后为对称面边界条件, 航行体为无滑移壁面。上层流体为理想流体, 下层流体为水, 空化气体为水蒸汽, 其中理想流体与水为可压缩流体。波浪的波长、波高和水深参数分别为1.0, 0.1和1.0 m。计算域前2 m为造波段, 该阶段通过波力使得波形始终与理论结果保持一致, 计算域后1.2 m为消波段, 为了保证能在出口位置将波面振幅下降至0, 消波段长度至少为1倍波长。
如图 2所示, 航行体采用典型的超空泡构型, 头部为圆盘空化器。航行体总长度为479.6 mm, 重心点距空化器278.0 mm, 其他参数见图 2。航行体质量1.855 kg, y和z方向的转动惯量为0.02 kg·m2, x方向转动惯量为0.000 9 kg·m2。航行体直径58.5 mm, 空化器直径21.1 mm, 尾喷口直径为36 mm。头部段长度193.7 mm, 直线段长度为209.2 mm。
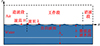 |
图1 数值水槽计算 |
 |
图2 航行体模型(单位:mm) |
1.3.2 网格划分
计算域网格如图 3所示, 计算域分为固定背景域与重叠网格区域, 背景区域负责造波消波, 重叠区域随着航行体运动, 其运动方式受工况影响。
在背景区域, 对波浪及其周边进行网格加密, 以保证精确捕捉气液界面。在重叠网格区域内, 对航行体周围进行加密, 对航行体头部进行二次加密, 以期获更精确的计算结果。重叠区域与背景区域之间的交界面采用动态网格加密技术, 使二者网格尺寸接近。为保证壁面附近的流体数据精确模拟, 尤其是涉及空化模拟, 需要对航行体壁面处进行边界层网格划分, 利用航行体直径、运动速度进行初步雷诺数估值, 进行边界层加密, 网格总数约为660万。
 |
图3 计算域与网格划分 |
1.3.3 模型验证
本研究涉及波浪环境的建模与航行体出水问题, 对不同性质的问题单独进行验证。波浪环境模拟结果如图 4所示波浪环境误差如表 1所示, 理论波速为1.313 m/s, 数值模拟波速为1.317 m/s, 误差为3.0%。综上所述, 波浪环境数值建模满足要求。
航行体在静水中出水的模拟结果与实验结果对比如图 5所示, 横坐标为时间, 纵坐标为无量纲运动距离。航行体为一小尺度高速射弹, 长度为48 mm, 横截面直径为6 mm, 空化器直径为3 mm, 具体参数可见文献[22]。数值模拟与实验结果变化趋势保持一致。数值模拟较实验结果略大, 误差范围始终较小, 满足计算精度要求。
 |
图4 验证算例波形验证 |
波浪环境误差统计
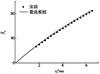 |
图5 航行体出水运动结果验证 |
2 波浪环境对航行体出水过程的影响
2.1 航行体出水模型
由于航行体出水运动速度较大, 空化作用明显, 在跨介质过程中首先需要经过一定距离的运动, 空化气泡达到稳定状态后再出水。空化空泡达到稳定后, 给航行体施加一个与同时刻轴向力幅值相等、方向相反的推力, 该推力幅值不变且始终与航行体轴线方向保持一致, 使航行体达到稳定的巡航状态, 此刻航行体头部与水平面的垂向距离约为水深h的1.1倍。最后, 释放航行体的自由度, 对航行体出水过程进行模拟, 获得其水动力特性与运动特性。
工况设置如表 2所示, 工况分为2组, 分别为固定轨迹固定速度(50 m/s)与六自由度出水(初始速度50 m/s)。航行体与波浪相对位置如图 6所示, 以StokesⅠ波浪理论的右侧波节为0°波浪相位角, 波峰为90°, 左侧波节为180°, 波谷为270°。本研究的波浪环境下, 波倾角最大的相位为41.4°和138.6°。由刘可、施红辉等[17, 23]及航行体与波浪相互作用的研究[24–25]可知, 高速航行体跨介质过程与流体流动关系不大, 而是与出水角度息息相关。因此, 以静水和波倾角最大的情况为研究对象, 波倾角与出水角的和为实际出水角度。
工况设定表
 |
图6 波浪相位与航行体出水位置 |
2.2 固定速度出水
对于固定速度出水, 航行体以20°出水角在静水情况下和波倾角最大的位置处出水, 航行体轴向力如图 7所示, 空泡与压强分布如图 8所示。在出水前静水和41.4°相位角的情况基本一致, 随着航行体的运动, 阻力逐渐减小。航行体在0时刻头部开始接触空气, 导致头部压强迅速降低, 阻力在极短的时间内降为0。与此同时, 位于航行体头部的空泡发生溃灭, 导致航行体肩部区域低压区消失, 海水接触航行体肩部时导致阻力又快速增加。之后随着航行体运动压强逐渐降低直到完全出水后阻力稳定至0。
航行体在138.6°波浪相位处出水过程中, 由于航行体与波面的夹角很小, 航行体在与出水点较远的距离空泡即开始变形, 空泡向气液界面变形, 三相接触线不断上移, 当三相接触线移动至航行体头部段后, 接触区域产生高压区, 对航行体阻力增加。且由于穿越点并非位于航行体头部, 阻力没有突然降低的情况。当航行体开始接触空气后, 压强迅速减小并稳定至0。
航行体横向力如图 9所示, 对于静水中入水和41.4°入水的情况, 航行体在水中航行时, 其横向力保持稳定。气泡溃灭后, 航行体肩部压强的突变导致横向力突变。位于航行体下方的水先接触航行体时, 横向力向上, 反之则横向力向下。当出水角度较大时, 横向力幅值随着出水角度的增加而增加。在138.6°的特殊情况下, 由于航行体出水角度过小, 未接触水之前空化空泡就发生了变形, 导致横向力突变时间提前, 且与其他两者方向相反。
航行体转动力矩如图 10所示, 其偏转力矩变化趋势与横向力相反, 这是由于横向作用力的点多集中于航行体重心前部。
不同于固定航行体, 6DOF模拟的过程中由于流体对固体的阻碍作用, 对航行体施加一个推力以保证其速度不发生减慢, 轴向推力为250 N, 作用时间从-30 ms开始。航行体轴向力、横向力与偏转力矩如图 11所示。航行体受力变化与固定速度出水情况较为类似, 但幅值与时间会有一定差异, 这是由于航行体在水中航行阶段受到了水流的影响, 其出水位置与姿态发生了一定的变化。
航行体轴向速度、横向速度、偏转运动响应、重心轨迹和弹道倾角如图 12所示。在出水过程中, 随着阻力减小, 航行体速度不断增加, 其中静水与41.4°相位角的轴向速度基本保持一致, 而138.6°工况下在出水过程受阻力较大的影响, 速度增速较慢。出水后, 三者速度变化率保持一致。同样的, 138.6°工况中, 航行体出现速度较高的水平运动。图 12c), 12d), 12f)中偏转角度正向为逆时针偏转, 航行体做低头运动。3种工况中, 静水出水与41.4°相位出水的转动运动响应较为接近, 轻微抬头, 但41.4°相位出水的偏转运动更加平稳。而138.6°工况中航行体持续低头。从重心轨迹可以发现静水出水与41.4°相位出水轨迹较为接近, 41.4°相位轨迹更低, 但是均高于理想轨迹, 而138.6°工况中航行体轨迹低于理想轨迹。表明出水角度的增加对航行体跨介质稳定性存在显著的不利影响。但是, 从弹道倾角可以发现, 整体运动过程中弹道倾角与偏转角度接近, 二者间的差异可以视为航行体运动的攻角, 在该过程中弹道倾角值始终位于偏转角度的上方, 表明航行体相较重心运动而言始终做低头运动, 而且随着运动的进行该差异缓慢增加。
 |
图7 航行体轴向力 |
 |
图8 航行体出水过程 |
 |
图9 航行体横向力 |
 |
图10 航行体偏转力矩 |
 |
图11 航行体受力响应 |
 |
图12 航行体运动响应 |
3 结论
本文基于RANS方程、VOF方法和入口速度造波法等, 建立了三维波浪环境数值水槽与复杂构型航行体跨介质过程数值模拟模型, 在此基础上, 研究了不同波浪相位、运动方式的倾斜出水过程, 分析了典型出水工况下航行体流体动力与运动响应。利用边界条件造波方法完成数值造波, 利用重叠网格和流固耦合方法求解复杂构型航行体跨介质过程中的流体动力特性, 经过验证发现工作段波幅误差不超过3%, 波长误差不超过1%。
获得了波浪相位与运动方式对航行体的受力和运动特性的影响规律, 航行体在138.6°相位角出水由于实际出水角过小, 在距离出水点较远处空泡即开始变形, 且穿越点并非位于航行体头部, 阻力没有突然降低的情况。出水过程中弹道倾角值始终位于偏转角度的上方, 航行体相较重心运动而言始终做低头运动, 而且随着航行体出水该攻角缓慢增加, 对航行体运动稳定性不利。
References
- FENG Jinfu, HU Junhua, QI Duo. Study on development needs and key technologies of air-water trans-media vehicle[J]. Journal of Air Force Engineering University, 2019, 20(3): 8–13 [Article] (in Chinese) [Google Scholar]
- TAN Junyi, HU Junhua, CHEN Guoming, et al. Numerical simulation of oblique water-exit process of trans-media aerial underwater vehicle[J]. Chinese Journal of Ship Research, 2019, 14(6): 104–121 (in Chinese) [Google Scholar]
- SUN Yifang, ZONG Zhi, JIANG Yichen. Review of longitudinal motion and controls of ships on waves[J]. Chinese Journal of Ship Research, 2020, 15(1): 1–12 (in Chinese) [Google Scholar]
- YANG Xiaoguang, DANG Jianjun, WANG Peng, et al. The influence of waves on the impact load during high-speed water-entry of a vehicle[J]. Acta Armamentarii, 2022, 45(2): 355–362 (in Chinese) [Google Scholar]
- SU Shaojuan, WANG Youzhi, WANG Tianlin, et al. Research on wave transfer performance of numerical wave tank[J]. Ship Science and Technology, 2020, 42(5): 61–65 [Article] (in Chinese) [Google Scholar]
- CHU X, YAN K, WANG Z, et al. Numerical simulation of water-exit of a cylinder with cavities[J]. Journal of Hydrodynamics, Ser B, 2010, 22(5): 877–881 [CrossRef] [Google Scholar]
- QIN N, LU C, LI J. Numerical investigation of characteristics of water-exit ventilated cavity collapse[J]. Journal of Shanghai Jiaotong University, 2016, 21: 530–540 [Article] [CrossRef] [Google Scholar]
- YUAN Xulong, LIU Wei, LI Bing, et al. Trajectory planning and simulation of mine for water exit attack[J]. Journal of Unmanned Undersea Systems, 2011, 19(5): 332–336 (in Chinese) [Google Scholar]
- WANG Ruichen. The numerical simulation of wave influence to the missile water gesture[J]. Journal of Qingdao University, 2010, 25(1): 28–31 (in Chinese) [Google Scholar]
- WANG Yadong, YUAN Xulong, ZHANG Yuwen, et al. Research on the effect of wave to vertical launch missile water trajectory[J]. Acta Armamentarii, 2012, 33(5): 630–635 (in Chinese) [Google Scholar]
- HOU J Y, TAN D C, BI S H, et al. Numerical research on the process of launching submarine missile by concentric canister launcher[J]. Journal of Solid Rocket Technology, 2011, 34(1): 9–13 [Google Scholar]
- YANG Jifeng, CHEN Jie, LIU Bingjie, et al. Simulation analysis of attitude perturbation of submarine launched missile under the influence of sea waves[J]. Journal of Ordnance Equipment Engineering, 2020, 41(9): 115–119 (in Chinese) [Google Scholar]
- GAO S, SHI Y, PAN G, et al. A study on the flow interference characteristics of projectiles successively launched underwater[J]. International Journal of Multiphase Flow, 2022, 151: 104066 [Article] [CrossRef] [Google Scholar]
- GAO S, SHI Y, PAN G, et al. A study on the cavitation vortex dynamics and loads of water-exiting axisymmetric projectile[J]. Physics of Fluids, 2023, 35(8): 85–112 [Google Scholar]
- SHI Y, GAO S, PAN G, et al. Simulation of the wake vortex and trajectory characteristics of successively launched multiple projectiles[J]. Ocean Engineering, 2022, 249: 110962 [CrossRef] [Google Scholar]
- WANG Zhihai, LIU Ke, LI Zhisheng. Research on the gesture of underwater vehicle exiting from irregular wave by numerical simulation method[J]. Ship Electronic Engineering, 2018, 38(7): 76–79 (in Chinese) [Google Scholar]
- LIU Ke, PAN Wenliang, LI Zhisheng. Research on gesture of vehicle exiting from different phase position of wave by numerical simulation method[J]. Computer Simulation, 2015, 32(12): 15–21 (in Chinese) [Google Scholar]
- CUI Qiwei, WANG Ruichen. Wave effect on gesture perforating water of submarine-launched missile[J]. Ordnance Industry Automation, 2011, 30(1): 19–21 (in Chinese) [Google Scholar]
- ZHANG Chongxian. Dynamics modeling and simulation of water-exit course of small submarine-launched missile under wave disturbance[J]. Journal of National University of Defense Technology, 2015, 37(6): 91–95 (in Chinese) [Google Scholar]
- QUAN Xiaobo, KONG Decai, LI Yan. Wave simulation and its effects on the exceeding water process of the underwater vehicle[J]. Journal of Harbin Institute of Technology, 2011, 43(3): 140–144 (in Chinese) [Google Scholar]
- SKJELBREIA L, HENDRICKSON J. Fifth order gravity wave theory[J]. Coastal Engineering Proceedings, 1960(7): 10 [CrossRef] [Google Scholar]
- ZHOU Donghui, SHI Honghui, LU Jianhua, et al. Cavitation characteristics of underwater high-speed vehicles exiting water in parallel[J]. Ship Science and Technology, 2023, 45(4): 74–79 (in Chinese) [Google Scholar]
- SHI Honghui, ZHOU Suyun, WANG Yun, et al. Study on fluid characteristics during supercavity projectile impacting water surface at different attack angles[J]. Journal of Ballistics, 2019, 31(1): 68–74 (in Chinese) [Google Scholar]
- ZHANG G, HOU Z, SUN T, et al. Numerical simulation of the effect of waves on cavity dynamics for oblique water entry of a cylinder[J]. Journal of Hydrodynamics, 2020, 32: 1178–1190 [CrossRef] [Google Scholar]
- CHEN C, YUAN X, LIU X, et al. Experimental and numerical study on the oblique water-entry impact of a cavitating vehicle with a disk cavitator[J]. International Journal of Naval Architecture and Ocean Engineering, 2019, 11(1): 482–494 [CrossRef] [Google Scholar]
All Tables
All Figures
|
图1 数值水槽计算 |
| In the text | |
|
图2 航行体模型(单位:mm) |
| In the text | |
|
图3 计算域与网格划分 |
| In the text | |
|
图4 验证算例波形验证 |
| In the text | |
|
图5 航行体出水运动结果验证 |
| In the text | |
|
图6 波浪相位与航行体出水位置 |
| In the text | |
|
图7 航行体轴向力 |
| In the text | |
|
图8 航行体出水过程 |
| In the text | |
|
图9 航行体横向力 |
| In the text | |
|
图10 航行体偏转力矩 |
| In the text | |
|
图11 航行体受力响应 |
| In the text | |
|
图12 航行体运动响应 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.