| Issue |
JNWPU
Volume 42, Number 4, August 2024
|
|
|---|---|---|
| Page(s) | 689 - 696 | |
| DOI | https://doi.org/10.1051/jnwpu/20244240689 | |
| Published online | 08 October 2024 | |
An air-ground integrated flight test technical framework based on flight simulation
一种基于飞行仿真的空地一体化试飞技术框架
1
School of Automation, Northwestern Polytechnical University, Xi'an 710072, China
2
COMAC Flight Test, Shanghai 201323, China
Received:
29
May
2023
Abstract
In the modern civil transport aircraft flight test, flight test practitioners need to constantly improve the ability and reduce flight test cycle as much as possible, considering the relationship between flight test efficiency and flight test safety. In order to improve the real-time safety assessment ability of flight test monitoring personnel and reduce the increased test tasks due to safety considerations, a technical framework of air-ground integrated flight test according to the simulation results was proposed. Based on the conventional flight test monitoring system, the technical framework adds the flight test safety assessment model, air-ground data synchronization system and flight test telemetry data real-time processing functions. The overall framework is suitable for most flight test subjects, but the flight test safety assessment models need to carry out simulation requirements capture, scene analysis and model verification according to the flight test subjects requirements. Finally, taking crosswind landing flight test as an example, the basic application of air-ground integrated flight test technology is illustrated, which can provide reference for promoting the air-ground integrated flight test technology.
摘要
在现代民用运输类飞机的试飞工作中, 权衡试飞效率与试飞安全之间的关系, 尽可能地压缩试飞周期是试飞从业人员需要不断提升的能力。为了提升试飞监控人员的实时安全评估能力, 进而提升试飞效率, 提出了一种基于仿真的空地一体化试飞监控技术框架。该技术框架在常规的试飞监控系统基础上, 增加了试飞安全评估模型、空地数据同步系统和试飞遥测数据实时处理功能等, 总体框架适用于大多数试飞科目, 但试飞安全评估模型需根据试飞科目的试飞要求进行仿真需求捕获、场景分析和模型验证等环节。以侧风着陆试飞科目为例, 说明了空地一体化试飞技术的基本应用过程, 可为空地一体化试飞技术的推广提供参考。
Key words: civil transport aircraft / flight test / flight test safety / flight test efficiency / simulation / crosswind landing
关键字 : 民用运输类飞机 / 飞行试验 / 试飞安全 / 试飞效率 / 仿真 / 侧风着陆
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
现代民用运输类飞机进行飞行试验的主要动因包括产品研发和建立产品安全飞行的要求和准则,其直接目的是判断飞机系统及其乘员能否安全地完成预定的任务[1]。同时,为了追求型号的商业成功,使其在后续的市场开拓中建立较好的声誉,现代民用运输类飞机型号往往要求以较高的试飞效率完成所有试飞任务,追求尽可能短的试飞周期,如波音B787的试飞周期为21个月,空客A380的试飞周期为18个月。
然而,飞行试验都具有一定的风险,其中的一些高风险试验很可能会危及飞机和其中乘员的安全,如侧风着陆、最小操纵速度、失速特性等就是典型的高风险飞行试验科目。这类科目的一个特点是试验点靠近飞机速度包线的左边界,试验中飞机有可能进入气动失速而引起异常机头上仰、非指令滚转和突然的升力损失等异常状态而导致飞机进入危险状态。为了控制风险,在实施这些科目时一般采用从一个较高速度逐步降低至设计指标的方式。但是,每次试验的速度步进值若设置太小会大大增加试飞任务量,进而导致试飞周期拉长,若设置太大,又达不到控制风险的目标。
为了高效控制试飞风险,提升试飞效率,国内外相关研究人员从试飞规划、科目风险评估、试飞监控等方面着手,开展了相关技术的研究与应用。袁冲等[2]建立了一套民机试飞规划与管理系统,可以根据民机试飞科目的逻辑等,优化试飞任务的安排。Hewett等[3]建立了一套具备自动匹配功能的试飞规划和监控系统。在试飞风险评估方面,孙碧晴等[4]提出了一种基于贝叶斯网络的科研试飞安全评估方法,Lu等[5]建立了一种可靠性分析与系统动力学方法耦合的试飞安全分析混合模型。以上的技术方法基本都是在试飞前进行试验规划和风险评估,缺乏在试验实施过程中的风险评估与控制手段。在试飞监控方面,山寿等[6]提出了一种基于数据分发服务和Windows Presentation Foundation(WPF)技术的试飞实时监控技术,有效提高了试飞监控系统的实时性和数据融合力度,然而在试验过程中的安全评估仍由监控人员凭经验进行判断。
据此,本文提出了一种空地一体化试飞监控技术。该技术以飞行仿真技术为基础,综合考虑试飞效率与试飞安全因素的关系,预研试飞安全评估模型,然后在试飞实施过程中,由该模型实时给出安全评估建议,进而可大大增强监控人员的试飞安全评估能力,又兼顾试飞效率的要求。该技术可为现代民用运输类飞机的试飞数字化转型提供支持。本文首先介绍了空地一体化试飞监控技术的框架及其中主要环节的技术要点,然后以侧风着陆飞行试验为例,说明了该技术的实施过程和效用。
1 空地一体化试飞监控技术框架
1.1 总体框架
空地一体化试飞监控技术以试飞遥测数据为输入,经过试飞安全评估模型的计算,再以一定的人机界面向监控人员显示分析结果并按需反馈至机组,如图 1所示。
如图 1所示,空地一体化试飞监控技术框架至少包括:试验机、遥测接收系统、地面实时数据处理系统、试飞安全评估模型、空地数据同步系统、空地对比监控界面和试飞监控大厅。其中,试验机、遥测接收系统和试飞监控大厅为民机试飞监控的常规组成,地面实时数据处理系统需在常规系统的基础上增加一些其他数据处理功能。试飞安全评估模型和空地数据同步系统为空地一体化试飞监控系统的特有组成,其中,空地对比监控界面需要根据试飞安全评估模型的输出内容定制化开发。下文中,仅对空地一体化试飞监控系统中的特有部分进行论述。
 |
图1 空地一体化试飞监控总体架构 |
1.2 地面实时数据处理系统
在民用运输类飞机型号试飞中,试飞数据的来源除了大量航空总线抽引参数以外,还有大量的试飞加改装参数,这些数据由位于飞机不同位置的大量传感器测量得来。然而,由于这些传感器本身的精度和安装位置的差异,以及数据编码记录、调制、发射、接收、解调等环节,都会带入误差,造成地面接收到的数据有野点、噪声以及相关联数据不相容的问题。
为了防止因遥测试飞数据质量差(如图 2所示),而导致试飞安全评估模型崩溃或计算结果不可靠等问题,地面试飞数据处理系统中需增加野点剔除/补正、数据滤波平滑的功能。
同时,空地一体化试飞监控技术需要快速地发现并定位试飞中出现的问题,为了保证评估结果的时效性,这些新增的数据处理算法必须具备较高的时效性。
 |
图2 遥测数据与航后数据的差异示例 |
1.3 试飞安全评估系统
试飞安全评估模型是空地一体化试飞监控技术的核心。其旨在提升监控人员的试飞安全实时评估能力,降低对人员经验的依赖性。在试飞监控中,监控人员一般根据试验科目的目标和风险进行安排。因此,试飞安全评估模型也应针对试飞任务场景的试验有效性和安全性来开发。一般来说,一个科目的试飞安全评估模型往往由多个判据共同组成。试飞安全评估模型的开发流程如图 3所示。
1) 试飞要求
试飞要求中给出了试飞对象、试飞科目验证的条款或内容、机场/气象等约束条件、试验点要求、所需测试参数和可接受判据等要素,是试飞安全评估模型开发的依据性文件,也是试飞任务实施的依据性文件之一。
2) 试飞仿真需求分析
根据试飞要求,结合已知的试验机状态,从试验点可达性、试验风险等角度分析试飞要求中各个要素对试验的影响。试飞仿真需求包括试验点配平计算、试验动作仿真、舵面余量实时计算、气动系数实时计算等。试飞仿真需求分析环节是直接影响试飞安全评估模型能否覆盖试验中可能出现的所有风险的重要环节。
3) 模型开发
模型开发环节中包括了场景分析、模型分析和代码实现3个子环节。
其中,场景分析是根据已确定的试飞仿真需求,分析试飞安全评估模型需要实现的功能,包括试验机本体以及试飞场景中涉及的环境要求。模型分析是在场景分析获得的模型功能要求的基础上,综合试飞要求中的参数允差要求、与试飞动作相关的模拟器客观测试要求等,给出模型的性能要求。代码实现是根据已确定的模型功能和性能要求,建立试飞安全评估模型。
4) 仿真验证
根据拟定的模型功能和性能要求,除首飞外,根据已有试飞数据,验证模型的功能和性能是否达到要求。特别指出,由于试飞安全评估模型是在科目实施前开发,因此没有完全符合要求的试飞数据验证模型。此时,需要根据试飞要求和试飞风险重点关注的飞行参数,将试飞动作分解,从已有试飞数据中搜索类似的试飞数据作为验证数据。
 |
图3 试飞安全评估模型开发流程 |
1.4 空地数据同步系统
空地一体化试飞监控通过综合分析试飞数据和仿真数据,判定试飞中可能出现的安全问题。在实际工程应用中,遥测数据存在延迟和多时钟来源的问题,仿真数据也存在延迟的问题,同时二者存在频率不一致的问题。
为了保证每一帧相互对比的试飞数据和仿真数据所对应的格林尼治时间相同,需要在试飞数据进入试飞安全评估模型前,先解决遥测数据的自身同步问题,然后在完成试飞安全评估模型运算后,再进行试飞数据与仿真数据的同步。
同样地,为了保证评估结果的时效性,这些数据同步算法必须具备较高的时效性。
最后,空地对比监控界面是基于试飞安全评估模型中捕获功能的要求对应定制化开发的。在实际工程使用中,可基于图形化界面开发工具设计一系列监控图形元素,实现监控界面的快速开发和修改。
2 试验示例
本节以侧风着陆试飞科目为例,说明空地一体化试飞监控技术的应用过程,并对使用到的数据处理、时间同步算法、模型建模理论进行详细讨论。
2.1 地面实时数据处理算法
2.1.1 野点剔除与补正
采用多项式滑动拟合的方法进行野值识别。对于当前的野值判别点,为避免后续的野值逆传而误将当前判别点判断为野值,不可采用中心差分法,一般采用前推差分法。可用七点二阶算法前推差分法[7],表达式如(1)式所示
 (1)
(1)
式中: yi为测量数据;ŷi为多项式滑动拟合方法计算出的拟合值。对于试验数据的前6个数据, 按照(2)式计算拟合值, 先检验前6个点是否为正常点。
 (2)
(2)
根据(2)式按时间顺序逐点计算ŷi和新息vi=yi-ŷi, 野点的新息vi远大于正常值, 野值通常满足(3)ŷ式要求。对于七点二阶前推差分算式, 根据格鲁布斯准则[8], 将其中的标准差项展开, 可得
 (3)
(3)
式中,E为野点判别的门限值。试验数据中连续野点的值通常都比较接近, 可用如下判据剔除连续野点: 当k点为野值时, 则满足(4)式的点也是野值。
 (4)
(4)
判断为野点后, 采用拉格朗日插值公式补正, 为高时效地完成野点补正, 仅取用当前时刻k之前的n个数据点。
 (5)
(5)
式中: ti, tj和tk分别为i, j和k时刻的时间; ŷk为k时刻的补正值。
(5) 式在数学上等价于前向插值, 给出的补正值精度相对使用前后数据补正的精度略低, 但可满足实时监控的需求。
2.1.2 数据滤波与平滑
为了使设计的低通数字滤波器对不同型号飞行器及不同采样率的飞行实测数据均有处理能力, 滤波器设计成可变带宽及可变采样率的形式。设计通带截止频率为ωp、阻带截止频率为ωq、采样周期为T的数字低通滤波器
 (6)
(6)
式中: ωp为通带截止频率;ωq为阻带截止频率。考虑到飞行试验过程中位置类、速度类和加速度类不同飞行参数频率特性以及采样频率会存在差异, 选定ωq=3ωq, 且ω>ωq时, 为了使设计的低通数字滤波器对不同采样频率的飞行参数均具有处理能力, 同时更有效地抑制高频噪声, 保护低频信号不受影响, 阻带衰减的技术指标分别为3倍频衰减20, 30, 40 dB, 设计二阶、三阶及四阶低通数字滤波器[9]如(7)~(12)式所示。
二阶低通数值滤波器的差分格式如下
 (7)
(7)
式中: y为实测数据; y为滤波后的数据
 (8)
(8)
三阶低通数值滤波器的差分格式为
 (9)
(9)
式中
 (10)
(10)
四阶低通数值滤波器的差分格式为
 (11)
(11)
式中
 (12)
(12)
2.2 试飞安全评估模型开发
2.2.1 试飞仿真需求分析
侧风着陆试飞涉及的验证内容较多, 包括操稳特性-侧风、发动机进气畸变-侧风等多个高风险试验。主要目的是验证飞机以及飞机系统是否满足在规定侧风条件下运行的要求。根据相关试飞要求, 梳理出试飞仿真需求为:
1) 需要能够根据飞机油量、人员数量及位置、飞机配载数量及位置和初始重心来快速计算试验机当前时刻的重心。
2) 在侧风试验执行期间, 为了快速判断起飞或着陆时间段风速是否满足要求, 需要记录飞机接地时间点。
3) 侧风着陆过程中, 飞行员一般采用“侧滑法+偏流法”的方式完成进近和着陆, 在着陆前一般均带有一定的偏流角, 此时的方向舵偏度不能真实反映抵御侧风风速所需的舵面余量, 需要开发舵面余量实时分析工具。
2.2.2 模型开发
1) 重心实时计算
实时重心计算适用于侧风着陆的所有试验点, 其核心是重量重心平衡方程, 如(13)式所示。
 (13)
(13)
式中:mtot为飞机总质量;n表示飞机总质量的组成个数;mi表示第i部分的质量;(xcg, ycg, zcg)为飞机的重心坐标;(xcgi, ycgi, zcgi)表示第i部分质量的重心坐标。对于试验机而言, 其总质量可划分为空机质量、燃油质量、机组质量和配载质量。对于每个试飞架次, 空机质量及其重心可通过配载单获得, 机组质量和配载质量及其重心根据机组人员和配载的标准质量及其所在机身结构框的站位获得, 燃油重量及其重心则可根据机载燃油系统实时输出的燃油余量结合型号重量平衡手册获得。
图 4是根据(13)式和型号重量平衡手册开发的质量、重心计算工具界面。在实际使用中, 初始化部分的数据根据每架次的配载单输入, 配载部分的数据根据机上工程师提供信息按需输入, 燃油部分根据机载测试系统提供数据输入, 精度与机载测试系统保持一致。
该工具的重心计算原理与型号配载单保持一致, 使用过往配置单数据作为工具验证数据即可。
2) 时刻记录
时刻记录的场景为起飞和着陆阶段, 主要通过无线电高度及轮速进行判断, 其中的判据由型号设计单位的定义和适航条款要求综合给定。在飞机试飞过程中, 通过接入遥测系统, 实时接收飞机的无线电高度参数和轮速参数, 记录飞机起飞及着陆的时间戳信息即可,如图 5所示。记录精度与机载测试系统保持一致, 不需再次验证。
3) 舵面余量计算
舵面余量计算场景主要为飞机在侧风进近和着陆过程中, 实时评估保持机头对准跑道方向的方向舵舵面操纵余量, 等价于不同速度条件下飞机能稳定侧滑的最大侧滑角, 进而评估飞机剩余抵御侧风能力。在实际试飞中, 侧滑角是动态变化的, 在短时间内超过最大稳定侧滑角仍可能安全着陆, 因此以最大稳定侧滑角作为边界是保守的, 可确保安全。
为实现此功能, 需要动力学模型、质量特性模型、发动机模型、飞控模型等。其中, 动力学模型需以飞机六自由度运动方程为基础进行建模, 具备全机的气动特性模拟能力, 一般由设计方和试飞方共同开发完成, 具体建模原理可参考文献[10]; 发动机模型应能较准确模拟稳态特性, 一般由发动机供应商提供; 飞控模型要与试验机装机版本保持一致, 一般由设计方提供。由于试验机有较多测试改装和临时配载, 质量特性模型一般由试飞方开发, 其基本原理由(13)~(14)式组成。
 (14)
(14)
式中:(Ixx, Iyy, Izz, Ixy, Ixz, Iyz)为全机的惯量;(Ixxi, Iyyi, Izzi, Ixyi, Ixzi, Iyzi)为第i部分质量的惯量。
为了保证舵面余量计算结果的准确性, 需要对动力学模型、质量模型、发动机模型和飞控模型集成后的模型进行精度验证。根据前述内容, 可以用飞机稳定侧滑的最大侧滑角来计算舵面余量, 参考文献[11]标准AC-60-FS-2019-006中客观测试要求, 主要使用稳定侧滑的试飞数据, 按稳定侧滑条目的D级客观测试要求验证模型精度, 对于给定的方向舵偏度δr容差要求如(15)式所示[11]。
 (15)
(15)
式中:下标sim表示仿真数据;下标flight表示试飞数据;ϕ为滚转角;β为侧滑角;δa为副翼偏度;δmfs为扰流板偏度。
考虑到发动机的推力对于着陆阶段的重要性, 发动机模型需能够较准确地模拟慢车推力和起飞推力, 须补充使用发动机空中推力确定试飞数据, 按纵向配平条目的D级测试要求验证模型精度, 容差要求如(16)式所示[11]。
 (16)
(16)
式中:δstab为水平安定面偏度;δe为升降舵偏度;θ为俯仰角;N1为发动机低压转子转速。
集成模型通过验证后, 可使用该模型进行指定方向舵偏度的稳定侧滑仿真模拟, 得到对应的最大稳定侧滑角。基本计算过程为: ①设置一系列空速点, 至少覆盖可能的着陆速度; ②确定对应空速点的方向舵最大可用偏度; ③使用集成模型, 指定方向舵偏度进行稳定侧滑仿真得到对应的最大侧滑角βmax。当指定方向舵偏度为各个速度下的最大可用偏度时, 即可得到图 6中蓝色曲线。
为划分风险程度层级, 取各个速度对应的方向舵最大可用偏度的70%, 重新进行稳定侧滑仿真模拟得到70%方向舵偏度对应的侧滑角, 即图 6中橙色曲线。
 |
图4 质量重心计算工具 |
 |
图5 起飞着陆阶段时刻记录工具 |
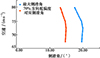 |
图6 稳定侧滑角与空速的关系 |
2.2.3 仿真验证
本节中仅给出舵面余量计算模型的验证结果, 其他需要验证的内容按2.2.2节中所述要求进行即可。
针对图 6给出的判据, 使用某型号的某次侧风试验数据进行验证, 如图 7所示。验证结果与飞行员评述和试飞数据相符。
特别地, 在进近着陆过程中, 机组特别关注航向与跑道的关系, 而飞机的仪表系统可清晰表征二者的偏差, 为了方便机组和地面监控人员使用该监控界面, 假设机组在侧风着陆接地之前, 使用偏流法进近, 则图 6中横坐标“侧滑角”等价于可修正的偏航角。因此, 在图 7中, 横坐标更改为“修正偏航角”。
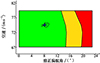 |
图7 舵面余量模型验证示例 |
2.3 空地数据同步算法
2.3.1 时间延迟修正
飞行动力学系统的传感器多可用二阶振荡系统描述, 对于2个传感器之间的时间延迟修正, 可通过(17)式进行修正[7]。
 (17)
(17)
式中:ωf为外作用力固有频率;ωs为s传感器的固有频率;ns为s传感器的阻尼;ωN为N传感器的固有频率;nN为N传感器的阻尼。工程上可以根据飞行测试数据各变量间的物理关系, 采用时间轴移动的方法进行时间延迟修正。
2.3.2 数据加密
针对试飞遥测数据中不同飞行参数频率不一致或由于测试设备限制而导致采样频率低等问题,可用拉格朗日插值法对试飞遥测数据进行加密处理。对于试飞遥测数据采样时间上的不同,也可通过拉格朗日插值方法进行修正[9]。
2.3.3 时间同步
为了保证评估结果的时效性,针对试飞数据和试飞仿真数据的特性,选择适合的同步算法,如时间戳匹配、特征匹配或状态估计等。
考虑到遥测数据存在多时钟源、频率差异和传输延迟,以及后续模型仿真引入的延迟均为毫秒级,且每个参数都带有时间戳,采用网络时间协议(network time protocol, NTP)进行时间同步。NTP是用于互联网中时间同步的标准互联网协议,其用途是把计算机的时间同步到某些时间标准。
NTP以客户机和服务器方式进行通信。每次共计2个包,客户机发送1个请求数据包,服务器接收后回送1个应答数据包。2个数据包都带有时间戳。NTP根据2个数据包的时间戳确定时间误差,并通过一系列算法消除不同步问题。目前,通常环境下,NTP提供的时间精确度在局域网上为亚毫秒级或者更高,可以满足空地对比监控的要求。
2.4 空地对比监控界面
图 8给出了侧风着陆空地对比监控主界面示意图。其中,区域①为方向舵余量监测区域;区域②为飞行参数列表,用于选择空地对比的参数;区域③为曲线绘制区,用于显示选中参数试飞遥测数据和模型仿真数据的同步对比;区域④和区域⑤为机载摄像头拍摄的垂尾前摄影像和机腹前摄影像。
特别指出,在实际的工程应用中,对于不同试飞科目,地面实时数据处理系统和空地数据同步系统中的算法是相对固定的,而试飞安全评估模型和空地对比监控界面是需要定制化开发的。
 |
图8 侧风着陆空地对比监控主界面示意 |
3 结论
1) 建立了一种以仿真手段为基础,在试飞中为试飞监控人员实时提供试飞安全评估建议的空地一体化试飞技术框架。
2) 试飞安全评估模型是空地一体化试飞监控技术的核心,高效的遥测试飞数据处理和数据同步算法是保证评估结果有效的必要条件。
3) 按空地一体化试飞监控技术框架开发的侧风着陆安全评估模型,实现了大型民用飞机侧风着陆试验点有效性和安全性的监控。
References
- ZHOU Ziquan. Flight test engineering[M]. Beijing: Aviation Industry Press, 2010 (in Chinese) [Google Scholar]
- YUAN Chong, XIU Zhongxin, TIAN Hailing, et al. Research on flight test planning and management for civil aircraft[J]. Civil Aircraft Design & Research, 2014(3): 1–4 (in Chinese) [Google Scholar]
- HEWETT M D, TARTT D M, DUKE E L, et al. The development of an automated flight test management system for flight test planning and monitoring[C]//The First International Conference on Industrial and Engineering Applications of Artificial Intelligence and Experts Systems, Tullahoma, TN, 1988: 324–333 [Google Scholar]
- SUN Biqing, YANG Xu, WU Shuang, et al. Application of Bayesian network in the safety risk assessment of flight test[J]. Flight Dynamics, 2019, 37(2): 92–96 (in Chinese) [Google Scholar]
- LU Y, ZHANG S G, ZHANG Z J, et al. Multiple hierarchy risk assessment with hybrid model for safety enhancing of unmanned subscale BWB demonstrator flight test[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2612–2626. [Article] [CrossRef] [Google Scholar]
- SHAN Shou, HAO Mingzhe, SUN Wei. Design of real-time monitoring system for flight test based on DDS and WPF technology[J]. Computer Measurement & Control, 2020, 28(3): 119–123 (in Chinese) [Google Scholar]
- CAI Jinshi. Identification and modeling of dynamic systems[M]. Beijing: Aviation Industry Press, 1991 (in Chinese) [Google Scholar]
- FEI Yetai, CHEN Xiaohuai, QIN Lan, et al. Error theory and data processing[M]. Beijing: China Machine Press, 2015 (in Chinese) [Google Scholar]
- CAI Jinshi. Aircraft system identification[M]. Beijing: China Astronautics Press, 1995 (in Chinese) [Google Scholar]
- FANG Zhenping, CHEN Wanchun, ZHANG Shuguang. Aircraft dynamics[M]. Beijing: Beihang University Press, 2005 (in Chinese) [Google Scholar]
- AC-60-FS-2019-006, 2019 Department of Flight Standard, Civil Aviation Administration of China. Aircraft Flight Simulator Qualification Performance Standards[S]. AC-60-FS-2019-006, 2019 (in Chinese) [Google Scholar]
All Figures
|
图1 空地一体化试飞监控总体架构 |
| In the text | |
|
图2 遥测数据与航后数据的差异示例 |
| In the text | |
|
图3 试飞安全评估模型开发流程 |
| In the text | |
|
图4 质量重心计算工具 |
| In the text | |
|
图5 起飞着陆阶段时刻记录工具 |
| In the text | |
|
图6 稳定侧滑角与空速的关系 |
| In the text | |
|
图7 舵面余量模型验证示例 |
| In the text | |
|
图8 侧风着陆空地对比监控主界面示意 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.