| Issue |
JNWPU
Volume 42, Number 4, August 2024
|
|
|---|---|---|
| Page(s) | 683 - 688 | |
| DOI | https://doi.org/10.1051/jnwpu/20244240683 | |
| Published online | 08 October 2024 | |
Energy management strategy of fuel cell electric vehicle based on work condition recognition
基于工况识别的燃料电池电动汽车能量管理策略
1
School of Automation, Northwestern Polytechnical University, Xi'an 710072, China
2
Electric Power Test Center of Shaanxi Investment, Xi'an 710061, China
Received:
6
July
2023
Abstract
To reduce hydrogen consumption in fuel cell electric vehicles, mitigate power fluctuations, and maintain the battery system's state of charge, a novel transition process recognition method based on work condition recognition framework of energy management strategy is proposed. This method offers the advantages such as higher recognition rates and faster recognition speed comparing with the traditional condition recognition methods. A comparison is made with the commonly used LVQ recognition method, and the simulations are conducted to demonstrate the superiority of this condition recognition algorithm and the improved performance of the energy management strategy based on the present recognition method under mixed work conditions.
摘要
为降低燃料电池电动汽车的氢气消耗、降低燃料电池输出功率波动率及维持电池系统的荷电状态, 基于工况识别能量管理策略框架提出了一种新型转移过程工况识别方法, 该方法相较于传统的工况识别方法具有识别率高、识别速度快等优点。与常见的学习向量量化神经网络工况识别方法进行对比, 通过仿真分别验证了所提工况识别算法的优势, 同时所提基于工况识别方法的能量管理策略在混合工况下具有更优的性能表现。
Key words: energy management strategy / work condition recognition / fuel cell electric vehicle
关键字 : 能量管理策略 / 工况识别 / 燃料电池电动汽车
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
燃料电池电动汽车(fuel cell electric vehicle, FCEV)是采用燃料电池作为主要动力源, 同时以蓄电池等储能系统作为辅助动力源的新能源纯电动汽车, 具有零排放、能量效率较高等优点, 因此具有较为广阔的应用前景。然而不同于仅具有一个功率源的传统内燃机汽车, FCEV具有燃料电池与储能系统2个动力源, 总输出功率可以由2个动力源以不同的占比分配进行输出, 该分配比的不同对车辆运行过程中的燃料消耗、动力系统的寿命等均会造成影响, 对FCEV能够具有良好的性能表现与更长的使用寿命具有至关重要的作用。
较为常见的能量管理策略可以分为基于规则与基于优化2种[1]。其中基于规则的能量管理策略通过设置简单的推理规则以及阈值对系统进行控制, 其优点在于实时的计算量较小, 同时结构简单, 易于实现, 是目前最为常用的能量管理策略[2]。然而基于规则策略的参数依赖于设计, 且在复杂工况下会出现管理效果变差的情况[3]。
为了在适应复杂混合工况环境的同时兼具基于规则能量管理策略的实时性, 一些研究者提出了基于工况识别的能量管理策略, 如文献[4–5]中采用了学习向量量化神经网络(learning vector quantization, LVQ)进行工况识别, 再应用对应类型工况下的优化参数实现优化管理。然而基于神经网络的工况识别算法需要采样较长时间内的工况数据才能够取得较好的识别结果, 响应速度过慢严重影响了工况识别的精准度; 此外, 随着样本数量提升, 神经网络在训练过程中会出现较难收敛的问题,从而影响识别效果, 甚至导致识别精度大幅下降等情况, 严重影响了该方法在工况数据数量较大情况下的应用。
为解决上述问题, 进一步提高工况识别方法的识别率, 本文提出一种新型工况识别算法, 该方法能够在大量工况数据下获得更好的识别效果。
1 FCEV动力系统建模
本文研究的FCEV的动力系统由燃料电池及其前级DC/DC变换器、锂电池以及与之级联的双向DC/DC变换器、驱动器与电机三部分组成。参照丰田Mirai型燃料电池电动汽车测试相关报告[6], 本节建立了对应部件的模型用于仿真过程。
1.1 燃料电池建模
本文所采用的燃料电池为质子交换膜燃料电池(proton exchange membrane fuel cell, PEMFC), 其参数如表 1所示。实际仿真过程中所采用的模型为Simulink工具箱中的PEMFC模型, 具体的建模方法已于文献[7]中详细描述, 此处不再赘述。
燃料电池参数
1.2 锂电池建模
根据文献[6]中所提供的FCEV参数, 锂电池开环电压为245 V, 额定容量为1.2 kWh; 本文采用Rint模型对锂电池进行建模, 对文献[8]的拟合结果做适当线性变换以符合本文中动力系统的需要, 最终得到的锂电池模型如(1)式所示, 式中S代表锂电池的荷电状态(state of charge, SOC)。
 (1)
(1)
1.3 汽车需求功率建模
为适当简化计算过程, 驱动器及电机部分的模型采用汽车需求功率模型的方式建立, 主要通过汽车功率平衡方程(2)式表示[9], ua为车速,Pe为车辆需求功率,式中其余参数的物理意义及其取值如表 2所示。
 (2)
(2)
需求功率计算参数
2 能量管理策略建立
本文中所采用的工况识别能量管理策略框架主要分为离线优化以及在线控制两部分, 在离线优化过程中, 采用遗传算法计算对应类别工况的最优模糊逻辑控制器参数, 并存储在控制器当中, 作为对应工况的最优控制器; 而在线控制部分则通过识别当前行驶工况, 将控制器的控制参数切换为在离线优化过程中所计算出的对应类型工况的最优控制参数, 从而达到实现优化控制的目标。以下将对该算法中各部分的实现进行详细介绍。
2.1 转移过程工况识别方法
基于LVQ神经网络的工况识别方法在实际应用过程中如前文所述, 存在响应速度较慢、大样本下难以收敛等问题。因此本文提出一种新型的工况识别方法, 称为转移过程识别方法, 现将其介绍如下。
2.1.1 转移过程概念
转移过程定义为车辆行驶工况中, 从一个速度采样点转移至另一个速度采样点的过程, 通过定义转移过程向量WTPV(transition process vector, TPV)进行描述,如(3)式所示。
 (3)
(3)
式中,T为采样周期。可以看出, 一个转移过程向量WTPV主要包括了车辆前一周期的速度v(t-1)、加速度a(t-1)以及车辆当前周期的速度v(t)、加速度a(t)这4个变量。通过该方式, 车辆在一段工况中各采样周期的转移过程可以被唯一定义。
将一段工况按照其采样点, 对每周期计算其TPV, 则将所计算得到的TPV的集合称为该工况的转移过程矩阵(transition process matrix, TPM), 本文所提出的工况识别过程将基于TPM的构建进行。
2.1.2 工况样本建立及聚类分析
本文选取ECE, EUDC, EUDCL, FTP, HWFET, IM240, JPN10, JPN15, LA92, NEDC, NYCC, SC03, UDDS, US06共14种国际标准测试工况作为分析及识别过程所采用的工况样本[10], 并根据文献[11]中所给出的微行程的定义, 即2段怠速区间中间的行驶片段, 将测试工况划分为85个微行程工况片段, 作为最终的工况数据库。
针对上述工况片段样本, 分别计算了其平均速度、最大速度、平均加速度、最大加速度、平均减速度、最大减速度共6个特征参数[12], 并基于这些特征参数进行层次聚类分析。聚类过程中样本间的距离定义为上述参数的欧氏距离, 最终得出的结果如图 1所示。根据该聚类结果将工况划分为3类, 并根据2.1.1节中的定义分别建立其TPM。
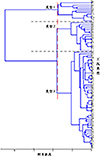 |
图1 层次聚类分析结果 |
2.1.3 工况识别算法
根据2.1.1节所定义的TPV及TPM建立方法, 本文提出一种基于转移过程的工况识别方法, 其单步运行流程如图 2所示。
当采集到驾驶速度信息时, 首先按照(3)
式中的定义方法, 计算当前采样周期下的TPV, 并计算与各个类型的TPM中所有TPV的距离。2个TPV之间的距离为其欧氏距离, 计算公式如(4)式所示。
 (4)
(4)
当完成对于距离的计算时, 定义所计算得到的最小距离ε(d), 并根据所计算得到的距离, 计算近似度向量Pcal=[PTPM1, PTPM2, PTPM3], 其计算公式如(5)式所示。
 (5)
(5)
式中: i为对应的TPM类别; n为TPM中满足与实时TPV距离等于ε(d)的向量数目,最终得到当前采样周期下TPV的近似度向量。
为防止发生短暂的误识别而导致识别结果突变的情况, 给出长期概率向量P, 以(6)式的方式对近似度向量进行累加,以维持识别结果的稳定性。式中遗忘因子η用于调节之前的识别结果对于识别率影响程度, 经过对算法实验测试后选取为0.9。
 (6)
(6)
计算完毕后, Pvector(t)中最大项所对应的工况类型即为该周期的识别结果。同时对识别结果进行判断, 如当前识别结果与上一周期识别结果不同, 即判断当前工况类型发生改变, 则将概率向量做清零处理以防止历史数据影响后续识别结果。至此完成一个采样周期的识别过程, 重复该识别过程即可实现对于汽车行驶过程中的工况类型判断。
 |
图2 基于转移过程的工况识别方法流程 |
2.2 模糊逻辑优化控制器
2.2.1 模糊逻辑控制器设计
本文中模糊逻辑控制器的作用为对需求功率进行分配, 其输入为FCEV当前的需求功率以及锂电池SOC, 输出为燃料电池的给定功率。隶属度函数如图 3所示,其主要参数及隶属度函数区间如表 3所示。通过顶点P以及区间宽度W进行定义。
模糊推理规则的设计有赖于工程经验以及实验结果, 根据图 3中对不同隶属度区间的命名, 本文中所使用的模糊逻辑规则设计如表 4所示。
 |
图3 输入输出隶属度函数 |
隶属度函数区间参数
模糊推理规则
2.2.2 多目标优化遗传算法
本文中采用遗传算法对不同类型下工况下模糊逻辑控制器的隶属度函数划分进行优化。本文中所采取的适应度函数如(7)式所示。式中hfitness为最终的适应度评估函数;hi和ci分别为其子目标评估函数及权重系数。
 (7)
(7)
本文中的优化目标包括燃料电池氢耗h1, 锂电池SOC变化值h2以及燃料电池输出功率波动率h3。燃料电池氢耗计算公式中N为燃料电池单体数, 本文中为65; F为法拉第常数; ηfc为燃料电池效率; MH2为氢气的摩尔质量, 本文中取2.02 g/mol; ifc为燃料电池输出电流, 即其对应权重系数为0.069。锂电池SOC变化定义为驾驶循环开始及结束时锂电池的SOC差值Sf-Ss, 其权重系数为0.919。燃料电池波动率是指燃料电池在整个工况中输出功率的变化情况, 在本文通过燃料电池每秒输出功率的变化值之和进行计算, 其中Pfc(n)为第n时刻燃料电池的输出功率, 其权重系数为0.012。
以该适应度函数为基准, 分别针对3类工况,对其对应的模糊逻辑控制器参数进行了优化, 优化后的参数值如表 5所示。
控制器参数优化结果
3 仿真结果及分析
为测试本文所提出的能量管理策略的有效性, 根据2.2节中建立的微行程库, 对这些微行程进行随机组合, 最终获得了如图 4所示的测试用工况。
根据2.1节中所提出的转移过程识别方法, 首先对之前所建立的测试工况进行了识别测试。为用于对比, 设置了经过训练的LVQ神经网络[6]同样进行识别测试。最终2种算法的识别结果如图 5所示。
根据识别结果计算得出, 对比工况的实际类型, 转移过程工况识别方法的识别准确率为93.1%, 而LVQ工况识别方法的识别准确率为67.5%。因此可以认为本文所提方法相较于传统的LVQ神经网络识别方法具有更高的识别率。
为验证本文所提出的工况识别方法在能量管理过程中的有效性, 基于所建立的测试工况, 在同一优化策略框架基础上, 分别采用上述2种识别算法, 而其余优化参数等保持一致, 对其能量管理策略进行仿真验证。以下对仿真结果进行分析。2种能量管理策略下燃料电池输出功率的曲线如图 6所示, 可以看出在采用转移过程工况识别方法后, 燃料电池的输出相较更为平滑连续。而图 7中给出了2种方法下锂电池的SOC曲线, 可以看出相较于LVQ工况识别方法, 采用了转移过程工况识别方法的电池SOC偏离其初始值0.7的范围更小。
根据第2.3节中所采用的优化目标函数计算方式对能量管理策略效果进行定量比较, 结果如表 6所示。可以看出采用转移过程工况识别方法后, 能量管理策略的各项优化目标均有不同程度减小, 因此可以证明本文中所提出的工况识别算法对整体能量管理效果具有明显提升作用。
 |
图4 测试工况曲线 |
 |
图5 工况识别结果分析 |
 |
图6 燃料电池输出功率曲线对比 |
 |
图7 锂电池SOC变化曲线 |
优化目标量化评估
4 结论
本文在基于工况识别的能量管理策略框架下提出了一种采用转移过程的新型工况识别算法, 通过仿真验证, 证明了该算法在大量工况数据场景下相较于传统的LVQ神经网络识别算法具有更高的识别率及识别速度。同时建立了基于转移过程识别算法的工况识别能量管理策略并应用于燃料电池电动汽车的能量管理当中, 与采用LVQ神经网络的工况识别算法进行比较, 证明了该算法在能量管理策略中的有效性及优越性。
References
- LI H, RAVEY A, N'DIAYE A, et al. A review of energy management strategy for fuel cell hybrid electric vehicle[C]//2017 IEEE Vehicle Power and Propulsion Conference, 2017: 1–6 [Google Scholar]
- HE Hongwen, MENG Xiangfei. A review on energy management technology of hybrid electric vehicles[J]. Transactions of Beijing Institute of Technology, 2022, 42(8): 773–783 (in Chinese) [Google Scholar]
- LI Q, CHEN W, LI Y, et al. Energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle based on fuzzy logic[J]. International Journal of Electrical Power & Energy Systems, 2012, 43(1): 514–525 [CrossRef] [Google Scholar]
- SONG K, LI F, HU X, et al. Multi-mode energy management strategy for fuel cell electric vehicles based on driving pattern identification using learning vector quantization neural network algorithm[J]. Journal of Power Sources, 2018, 389: 230–239. [Article] [CrossRef] [Google Scholar]
- CHEN D, WANG T, QIAO T, et al. Driving cycle recognition based adaptive equivalent consumption minimization strategy for hybrid electric vehicles[J]. IEEE Access, 2022, 10: 77732–77743. [Article] [CrossRef] [Google Scholar]
- LOHSE-BUSCH H, STUTENBERG K, DUOBA M, et al. Technology assessment of a fuel cell vehicle: 2017 Toyota Mirai[R]. ANL/ESD-18/12, 2018 [Google Scholar]
- TREMBLAY O, DESSAINT L A. A generic fuel cell model for the simulation of fuel cell vehicles[C]//2009 IEEE Vehicle Power and Propulsion Conference, 2009: 1722–1729 [Google Scholar]
- MENG Xiang, LI Qi, CHEN Weirong, et al. An energy management method based on pontryagin minimum principle satisfactory optimization for fuel cell hybrid systems[J]. Proceedings of the CSEE, 2019, 39(3): 782–792 (in Chinese) [Google Scholar]
- ZHANG Wenchun, JIN Junling. Theory of automobile[M]. Beijing: China Machine Press, 2005 (in Chinese) [Google Scholar]
- EPA. Dynamometer drive schedules[EB/OL](2015-09-16) [2023-06-27]. [Article] [Google Scholar]
- MAYAKUNTLA S K, VERMA A. A novel methodology for construction of driving cycles for indian cities[J]. Transportation Research Part D: Transport and Environment, 2018, 65: 725–735. [Article] [CrossRef] [Google Scholar]
- LEI Z, CHENG D, LIU Y, et al. A dynamic control strategy for hybrid electric vehicles based on parameter optimization for multiple driving cycles and driving pattern recognition[J]. Energies, 2017, 10(1): 54. [Article] [CrossRef] [Google Scholar]
All Tables
All Figures
|
图1 层次聚类分析结果 |
| In the text | |
|
图2 基于转移过程的工况识别方法流程 |
| In the text | |
|
图3 输入输出隶属度函数 |
| In the text | |
|
图4 测试工况曲线 |
| In the text | |
|
图5 工况识别结果分析 |
| In the text | |
|
图6 燃料电池输出功率曲线对比 |
| In the text | |
|
图7 锂电池SOC变化曲线 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.