| Issue |
JNWPU
Volume 42, Number 5, October 2024
|
|
|---|---|---|
| Page(s) | 838 - 846 | |
| DOI | https://doi.org/10.1051/jnwpu/20244250838 | |
| Published online | 06 December 2024 | |
Analysis influence of engine’s dynamic characteristics on helicopter’s flight quality
发动机动态特性对直升机飞行品质的影响分析
National Key Laboratory of Helicopter Aeromechanics, College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
Received:
24
September
2023
Abstract
This article analyses the influence of an engine’s dynamic characteristics on a helicopter’s flight quality during hover/low speed forward flight. Firstly, based on the power matching relationship between the engine and the helicopter, a helicopter-engine coupling model was established. The torque response, altitude response, and collective yaw coupling characteristic in the ADS-33E-PRF flight quality criteria was used to quantitatively evaluate the influence of the dynamic characteristics. The results indicate that the lag in the engine’s output leads to deterioration in the flight quality of the helicopter such as torque and collective-yaw coupling motion and has a negative influence on the helicopter’s altitude response flight quality. As the forward flight speed increases, the influence of the engine on torque response characteristics and collective yaw coupling effect further increases, but the adverse influence on altitude response is alleviated. This study provides reference for the design of helicopter-engine coupling control laws.
摘要
分析了发动机动态特性对直升机在悬停和低速前飞状态下飞行品质的影响。基于发动机与直升机之间的功率匹配关系, 建立直升机/发动机耦合模型。使用ADS-33E-PRF飞行品质规范中的扭矩响应、高度响应与总距偏航耦合特性指标, 定量评估发动机动态特性的影响。结果表明: 发动机输出滞后导致直升机扭矩与总距偏航耦合操纵品质下降, 同时会对直升机高度响应产生负面影响。随着前飞速度增加, 发动机对扭矩响应特性与总距偏航耦合效应的影响进一步加剧, 但对高度响应的不利影响得到缓解。该研究可以为直升机/发动机耦合控制律设计提供参考依据。
Key words: helicopter / engine / coupling model / flight quality / engine dynamic characteristics
关键字 : 直升机 / 发动机 / 耦合模型 / 飞行品质 / 发动机动态特性
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
飞行品质是评估直升机设计的重要指标。当直升机需用功率发生变化时, 发动机输出滞后会导致旋翼转速发生变化, 改变旋翼拉力, 降低直升机飞行品质[1–3]。因此, 从飞行品质标准角度评估发动机动态特性的影响对直升机/发动机耦合控制律设计具有重要意义。
自ADS-33E-PRF飞行品质规范[4]发布以来, 国内外研究人员广泛采用该标准对直升机的各项飞行品质指标进行研究。陈仁良等[5]根据规范中的快捷性要求, 对直升机纵向通道的飞行品质等级进行评估。Lawrence[6]使用规范要求改进了新型直升机的设计过程。Yuan等[7]使用规范中的带宽、相位延迟指标对新构型直升机进行评估。Altamirano等[8]使用规范中的轴间耦合要求, 对发动机故障期间的飞行品质进行了研究。这些研究主要集中在直升机操纵带宽、相位延迟、姿态快捷性等方面。目前, 关于发动机动态特性对直升机飞行品质影响的研究相对较少。
为研究发动机动态特性对直升机飞行品质的影响, 需要建立一种能够同时反映直升机飞行动力学、发动机气动热力学以及两者之间功率匹配关系的直升机/发动机耦合模型。Richardson等[9]建立直升机/发动机耦合模型以解决旋翼轴共振问题, 但没有研究发动机输出滞后引起的旋翼转速变化。曾庆福等[10]使用简化旋翼/发动机模型, 从转子动力学角度简要分析了发动机动态特性对旋翼转速的影响。Guglieri[11]使用直升机/发动机耦合模型对发动机燃油调节器参数进行设计。Zhang等[12–13]建立直升机/发动机模型, 使用LQG控制方法降低了发动机输出滞后引起的转速超调。宋招枘等[14]设计了一种基于发动机输出转速边界限制的直升机总距限制器。杨庶[15]基于LQR/动态逆方法研究直升机/发动机一体化控制律。这些研究主要集中在降低涡轴发动机输出转速波动上, 没有从飞行品质角度分析发动机动态特性的影响。随着直升机制造技术的不断进步, 使用更轻的旋翼将使发动机动态特性影响更加明显。因此, 基于飞行品质定量评估直升机/发动机耦合特性的影响, 对设计直升机/发动机耦合控制律, 降低发动机动态特性的不利影响显得尤为重要。
为分析发动机对直升机飞行品质的影响, 建立直升机飞行动力学模型和发动机部件级气动热力学模型。根据功率匹配关系建立直升机/发动机耦合模型。选择规范中的扭矩响应、高度响应与总距-偏航耦合特性指标, 比较悬停/低速前飞时直升机飞行品质评估结果, 定量分析发动机动态特性的影响。
1 直升机/发动机耦合模型建模
1.1 直升机飞行动力学模型
以UH-60A直升机为研究对象, 建立直升机飞行动力学模型[16–18]。在单旋翼带尾桨直升机上, 旋翼同时起升力面, 操纵面和推进器的作用, 是直升机上最为核心的部件[19–21]。因此, 旋翼建模是直升机飞行动力学建模最重要的部分。为研究发动机动态特性对直升机飞行动力学的影响, 旋翼转速根据发动机模型计算结果确定。当旋翼转速变化后, 桨叶微段的气动力、惯性力均发生改变, 引起桨叶运动与诱导速度变化。为准确描述旋翼转速改变后直升机的动态响应, 使用桨叶分段法建立旋翼模型。桨叶挥舞、摆振运动采用全局伽辽金法计算, 而旋翼诱导速度则根据Pitt-Peters动态入流模型计算得到。
尾桨模块使用桨盘积分法建模, 尾桨诱导速度使用均匀入流模型计算。直升机机身、可动平尾和垂尾的气动力根据风洞试验数据插值获得。可动平尾安装角随平飞速度变化。直升机模型的合力、合力矩计算方程组为
 (1)
(1)
式中:下标MR, fslg, TR, HT, VT分别表示旋翼、机身、尾桨、平尾与垂尾;m为直升机质量。
1.2 发动机气动热力学模型
以GE-T700型发动机为研究对象, 建立发动机气动热力学模型[22–23]。使用部件特征曲线数据, 建立压气机、燃烧室、燃气涡轮、动力涡轮等部件的数学模型。根据容积动力学、气动热力学与转子动力学关系, 得到发动机共同工作方程组
 (2)
(2)
式中: T表示温度; p表示压强; W表示气体流量, 脚标表示对应特征截面。B3表示压气机放气系数; Kbl表示冷却燃气发生器气体。Q表示扭矩, 脚标GT, PT, C, req分别表示燃气发生器、动力涡轮、压气机与负载扭矩。J表示转动惯量。NG, NP分别表示燃气涡轮转速和动力涡轮转速。
1.3 直升机/发动机耦合模型
根据功率匹配关系建立直升机/发动机耦合模型, 如图 1所示。
 |
图1 直升机/发动机耦合模型示意图 |
直升机需用扭矩是涡轴发动机的外部激励, 影响发动机的输出响应。发动机输出的迟滞效应导致功率供给无法满足直升机的功率需求, 输出轴两端功率不匹配, 造成旋翼转速超调或下垂。旋翼转速改变引起直升机飞行状态变化, 影响直升机的飞行品质。旋翼与发动机之间的耦合关系是直升机/发动机耦合模型的核心。根据功率与扭矩、转速的等价关系、旋翼轴扭矩的平衡关系, 得到旋翼/发动机耦合关系
 (3)
(3)
式中:P为功率;Ω为旋翼转速。QE为发动机输出至旋翼轴的等效扭矩, Qreq为直升机需用扭矩。
直升机/发动机耦合模型计算流程如图 2所示。
 |
图2 直升机/发动机耦合模型计算流程图 |
直升机/发动机耦合模型动力学方程组如下
 (4)
(4)
式中: x表示直升机飞行动力学方程中的状态量; u表示直升机操纵量; t为时间。xB代表机体运动向量, xF代表旋翼挥舞运动向量, xL代表旋翼摆振向量, xI代表旋翼入流向量, xE代表发动机内部状态量。u, v, w为直升机线速度, p, q, r为直升机角速度, φ, θ, ψ为直升机欧拉角。β1, β2, β3, β4为挥舞角,  为挥舞角速度, ζ1, ζ2, ζ3, ζ4为摆振角,
为挥舞角速度, ζ1, ζ2, ζ3, ζ4为摆振角,  为摆振角速度, vi0, vic, vis为旋翼诱导速度, 使用动态入流模型计算旋翼诱导速度, 脚标代表入流模型的3个分量。NG, NP, p3, p41, p45分别表示发动机燃气发生器转速, 动力涡轮转速, 压气机压强, 燃气涡轮压强与动力涡轮压强, 共计33个状态量。δcol为总距杆量, δlat为横向周期变距, δlon为纵向周期变距, δped为脚蹬操纵量。wf为燃油流量, 共计5个操纵量。
为摆振角速度, vi0, vic, vis为旋翼诱导速度, 使用动态入流模型计算旋翼诱导速度, 脚标代表入流模型的3个分量。NG, NP, p3, p41, p45分别表示发动机燃气发生器转速, 动力涡轮转速, 压气机压强, 燃气涡轮压强与动力涡轮压强, 共计33个状态量。δcol为总距杆量, δlat为横向周期变距, δlon为纵向周期变距, δped为脚蹬操纵量。wf为燃油流量, 共计5个操纵量。
2 模型验证
使用UH-60A直升机AEFA(the United States army aviation engineering flight activity)飞行试验[23]数据对直升机模型配平计算结果进行验证, 直升机质量7 257.0 kg, 质心位置坐标(8.92, 0, 5.88)m, 压强高度1 600 m。图 3对比了直升机模型配平计算结果与飞行试验结果, 二者吻合良好。
 |
图3 直升机模型配平计算结果 |
根据试验结果[24]对涡轴发动机气动热力学模型进行验证。发动机动力涡轮转速2 188.1 rad/s, 燃气涡轮设计转速4 680.97 rad/s。发动机气动热力学模型计算值与试验结果如图 4所示, 结果表明, 本文建立的发动机气动热力学模型计算结果与文献[24]结果吻合较好, 具有较高的精度。
 |
图4 发动机稳态共同工作方程计算结果 |
在此基础上, 使用飞行试验结果验证直升机/发动机耦合模型的动态响应计算结果。悬停状态直升机/发动机耦合模型的计算结果与文献[23]结果对比如图 5所示。直升机质量7 271.09 kg, 质心位置坐标(9.13, 0, 5.91)m, 压强高度1 649.27 m, 旋翼转速26.87 rad/s。
 |
图5 直升机/发动机耦合模型动态响应结果(悬停) |
前飞状态直升机/发动机耦合模型的计算结果与文献[23]结果对比如图 6所示。此时直升机平飞速度30.87 m/s, 直升机质量7 479.86 kg, 质心位置坐标(9.13, 0, 5.90)m, 压强高度1 484.99 m, 旋翼转速27.0 rad/s。
 |
图6 直升机/发动机耦合模型动态响应结果(前飞) |
从图 5–6可知, 模型计算结果与UH-60A飞行试验结果吻合较好。这表明, 本文建立的直升机/发动机耦合模型具有较高的精度, 可以用于评估发动机动态特性对直升机飞行品质的影响。
3 飞行品质评估
直升机与发动机耦合引起的发动机输出功率滞后直接改变旋翼轴扭矩及旋翼拉力, 对扭矩响应特性、总距偏航耦合特性及高度响应特性产生不利影响。因此, 选择飞行品质规范中与发动机动态特性直接相关的指标: 扭矩响应特性、高度响应特性和总距偏航耦合特性, 定量评估发动机动态特性对直升机飞行品质的影响[25]。
3.1 扭矩响应特性
扭矩响应特性指直升机对外部指令输入下产生的扭矩变化的反应特性。为计算直升机扭矩响应特性飞行品质, 需对直升机施加10 s以上的总距阶跃输入。得到扭矩响应的峰值Q0, 峰值时间tp与峰值后的第一个谷值Q1。如果扭矩响应没有谷值, 则取操纵输入10 s的扭矩作为Q1。使用扭矩过冲比Q0/Q1和峰值时间tp为指标, 根据ADS-33E-PRF标准, 判断直升机扭矩响应特性的飞行品质等级。
为研究直升机的扭矩响应特性, 首先需要明确发动机动态特性随负载扭矩和高度的变化规律。将发动机部件级气动热力学模型在共同工作点处线化, 并将线化模型降阶为仅包含燃气涡轮转速NG和动力涡轮转速NP的二阶状态方程形式。从状态方程计算动力涡轮转速输出的等效二阶系统
 (5)
(5)
式中:ωn, ζ分别为发动机等效系统的固有频率与阻尼比。计算固有频率和阻尼比随负载扭矩和飞行高度的变化, 结果如表 1所示。
发动机等效二阶系统参数随负载条件变化表
从表 1可以看出, 随着负载扭矩的增加, 发动机等效二阶系统的固有频率增加, 而阻尼比降低。飞行高度增加后, 空气密度降低, 旋翼需用功率增加, 而发动机可用功率降低。因此发动机的固有频率随高度增加而降低, 阻尼比随高度增加而增大。图 7给出了旋翼扭矩动态响应曲线。
 |
图7 扭矩响应曲线 |
从图 7可以看出, 发动机动态特性影响使得扭矩响应峰值时间明显增加。样例直升机的扭矩响应飞行品质如图 8所示。
 |
图8 样例直升机扭矩响应特性飞行品质等级 |
如图 8所示, 考虑发动机动态特性后, 直升机扭矩响应飞行品质由等级1降低至等级1与等级2边界, 扭矩响应峰值时间延长, 扭矩过冲比增加。悬停状态下, 发动机输出的滞后效应导致Q0/Q1增加了0.112, 同时, tp也增加了0.54 s。随着前飞的增加, 发动机动态特性引起的Q0/Q1增幅减小至0.098, 降低了12.5%, 然而, tp增加至0.59 s, 增加了9.26%。随着前飞速度增加, 发动机对扭矩响应飞行品质的不利影响逐渐增大。
3.2 高度响应特性
高度响应特性定量描述直升机施加总距操纵后垂向高度的变化情况。为计算直升机高度响应特性飞行品质, 施加总距阶跃操纵, 记录5 s内直升机高度响应结果。ADS-33E-PRF规范中要求直升机悬停或低速前飞时, 施加总距阶跃操纵后至少5 s内, 垂向速度应具有定性的一阶外形, 并且参数由等效一阶垂向速度-总距传递函数确定。使用最小二乘法拟合总距操纵输入后5 s垂向速度响应计算结果, 求解传递函数中的参数系数。
 (6)
(6)
式中: K, Tḣ, τḣ分别为增益幅值, 一阶环节系数与等效时间延迟; ḣ为直升机在地轴系下的速度。图 9给出了不同前飞速度下样例直升机的垂向速度响应曲线。图 10对比拟合函数插值计算结果与模型计算得到的垂向速度响应结果。
 |
图9 直升机垂向速度响应曲线 |
 |
图10 悬停状态高度响应拟合曲线 |
根据鉴定系数r2评估拟合结果的准确性。鉴定系数r2的定义为
 (7)
(7)
式中:ti表示第i个观察数据点的时间;ḣm表示地轴系垂向速度ḣ的平均值。规范要求鉴定系数r2在(0.97~1.03)范围内。
不同前飞速度下计算得到的高度响应拟合曲线参数如表 2所示, 鉴定系数均在规定范围内, 表明拟合函数计算结果的准确性。
高度响应插值计算结果
根据标准要求, 使用拟合函数参数评估发动机动态特性对直升机高度响应飞行品质的影响, 评估结果如图 11所示。以10 m/s速度前飞时高度响应飞行品质由等级1降低至等级2。发动机输出功率滞后会对直升机高度响应飞行品质产生不利影响。这是由于发动机输出功率滞后会降低旋翼转速, 改变旋翼拉力, 使得高度响应Tḣ, τḣ增加。
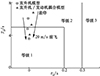 |
图11 样例直升机高度响应飞行品质等级 |
悬停状态下, 发动机输出滞后效应使高度响应Tḣ增加0.68 s, τḣ增加0.03 s。随着前飞速度增加, 发动机动态特性引起的Tḣ增幅减小至0.44 s, 降低了35.3%, τḣ增幅减小至0.005 s, 降低了83.0%。发动机输出滞后引起旋翼转速波动, 对旋翼拉力的影响随前飞速度的增加而降低。飞行速度增加削弱了发动机对高度响应特性的不利影响。
3.3 总距偏航耦合特性
直升机飞行过程中, 由于旋翼系统工作特性, 使得在一个飞行控制通道(如俯仰、滚转或偏航)操纵输入时, 不可避免地在其他控制通道引发非期望的响应, 即轴间耦合。直升机各通道存在严重的操纵耦合问题, 其中之一是总距操纵引起的偏航耦合。ADS-33E-PRF规范中关于总距操纵引起偏航耦合特性计算流程如下: 对样例直升机施加总距阶跃操纵; 记录操纵信号输入3 s后的垂向速度h(3)与偏航角速度响应历程; 偏航角速度存在峰值时, 将峰值记为r1,如果没有峰值, 取操纵输入1 s时的偏航角速度r(1)。r3计算方法为:
 (8)
(8)
式中, r(3)为第3秒末的偏航角速度。根据偏航角速度与垂向速度的比值计算总距-偏航耦合特性的飞行品质。图 12给出不同前飞速度下垂向速度与偏航角速度响应计算结果。从图 12d)–12f)可以发现, 发动机输出扭矩滞后会引起直升机偏航方向反向运动。
 |
图12 总距操纵引起的偏航耦合动态响应计算结果 |
使用|r1/ḣ3|, r3/|ḣ3|对总距偏航耦合特性飞行品质进行评估, 评估结果如图 13所示。
 |
图13 总距偏航耦合特性飞行品质等级 |
发动机动态特性影响使得直升机总距偏航耦合飞行品质由等级1降低至等级2, 且r3/|ḣ3|符号改变。发动机输出滞后引起的直升机偏航方向响应滞后, 恶化了总距偏航耦合飞行品质, 而且会导致偏航角速度出现反向变化过程, 影响驾驶员判断。悬停状态下, 发动机输出滞后使得r3/|ḣ3|增加了1.028 ((°)·s-1)/(m·s-1), |r1/ḣ3|增加了0.504 ((°)·s-1)/(m·s-1)。随着前飞速度的增加, 发动机动态特性引起的r3/|ḣ3|减小至0.789 ((°)·s-1)/(m·s-1), 降低了23.2%, 但|r3/ḣ3|增加至0.706 ((°)·s-1)/(m·s-1), 增加了40.0%, 发动机动态特性引起的偏航角速度反向变化变得更加明显。基于上述分析结果与飞行品质要求, 可知结论: 发动机对总距偏航耦合的不利影响随前飞速度增加而恶化。
4 结论
建立耦合发动机动态特性的直升机飞行动力学模型, 以UH-60A直升机为例, 研究发动机-直升机动态耦合效应对直升机飞行品质的影响。基于上述工作, 得出如下结论:
1) 发动机/旋翼系统动态耦合效应加剧直升机偏航轴的响应滞后, 降低了直升机扭矩响应和总距偏航耦合的飞行品质等级。样例直升机悬停状态下, 发动机输出的滞后效应与忽略发动机影响情况相比, 扭矩响应超调时间tp增加0.54 s, 同时偏航角速度与垂向速度之比|r1/ḣ3|增加0.504((°)·s-1)/(m·s-1)。随着前飞速度的增加, 发动机动态特性的影响使得同比tp增加了9.26%, |r1/ḣ3|同比增加了40.0%。前飞速度的增加进一步加剧了发动机输出滞后对扭矩响应与总距/偏航耦合飞行品质的不利影响。
2) 发动机动态特性还对直升机高度响应飞行品质产生不利影响。样例直升机悬停状态下, 发动机输出的滞后效应与忽略发动机影响情况相比, 高度响应Tḣ增加了0.68 s, τḣ增加了0.03 s。随着前飞速度的增加, 发动机对Tḣ的影响同比降低35.3%, 对τḣ的影响同比降低83.0%。旋翼/发动机耦合效应对直升机垂向响应特性的不利影响得到缓解。
References
- CHEN R, YUAN Y, THOMSON D. A review of mathematical modelling techniques for advanced rotorcraft configurations[J]. Progress in Aerospace Sciences, 2021, 120: 100681 [Article] [CrossRef] [Google Scholar]
- AGARWAL D, LU L, PADFIELD G D, et al. Rotorcraft lateral-directional oscillations: the anatomy of a nuisance mode[J]. Journal of the American Helicopter Society, 2021, 66: 1–13 [Google Scholar]
- CHEN Renliang, LI Pan, WU Wei, et al. A review of mathematical modeling of helicopter flight dynamics[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 520915 (in Chinese) [Google Scholar]
- BASKETT B J. Aeronautical design, performance specification, handing qualities requirements for military rotorcraft[S]. ADS-33E-PRF, 2000 [Google Scholar]
- CHEN Renliang, GAO Zheng. Investigation of helicopter longitudinal control response based on ADS-33 requirements[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2003, 35(3): 231–236 [Article] (in Chinese) [Google Scholar]
- LAWRENCE B. Incorporating handling qualities analysis into rotorcraft conceptual design[C]//AHS Rotorcraft Handling Qualities Specialists Meeting, Huntsville, AL, 2014 [Google Scholar]
- YUAN Y, THOMSON D, CHEN R. Propeller control strategy for coaxial compound helicopters[J]. Journal of Aerospace Engineering, 2019, 233(10): 3775–3789 [Google Scholar]
- ALTAMIRANO G, MATT J, FOSTER J. Flying qualities analysis and piloted simulation testing of a lift cruise vehicle with propulsion failures in hover and low-speed conditions[C]//Proceedings of the Vertical Flight Society 79th Annual Forum, 2023: 1–24 [Google Scholar]
- RICHARDSON D A, ALWANG J R. Engine/airframe/drive train dynamic interface documentation[R]. ADA-055766-1978 [Google Scholar]
- ZENG Qingfu, XIE Guanghua, LI Ting. Integrated simulation model of a helicopter rotor/engine system[J]. Acta Aeronautica et Astronautica Sinica, 1997, 18(5): 563–566 [Article] (in Chinese) [Google Scholar]
- GUGLIERI G. Effect of drive train and fuel control design on helicopter handling qualities[J]. Journal of the American Helicopter Society, 2000, 46(1): 14–22 [Google Scholar]
- ZHANG H B, WANG J K, CHEN G Q, et al. A new hybrid control scheme for an integrated helicopter and engine system[J]. Chinese Journal of Aeronautics, 2012, 25(4): 533–545 [Article] [CrossRef] [Google Scholar]
- WANG Y, ZHENG Q G, XU Z G, et al. A novel control method for turboshaft engine with variable rotor speed based on the NG dot estimator through LQG/LTR and rotor predicted torque feedforward[J]. Chinese Journal of Aeronautics, 2020, 33(7): 1867–1876 [Article] [CrossRef] [Google Scholar]
- SONG Zhaorui, ZHAO Jingchao, YANG Wenfeng. Boundary protection control method of helicopter power system based on flight test analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(1): 100–105 (in Chinese) [Google Scholar]
- YANG Shu. Helicopter integrated flight-engine control with envelope protections[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(suppl 1): 727560 (in Chinese) [Google Scholar]
- LI Pan, CHEN Renliang. A mathematical model for helicopter comprehensive analysis[J]. Chinese Journal of Aeronautics, 2010, 23(3): 320–326 [Article] [NASA ADS] [CrossRef] [Google Scholar]
- KIM F D, CELI R, TISCHLER M B. High-order state space simulation models of helicopter flight mechanics[J]. Journal of the American Helicopter Society, 1993, 38(4): 16–27 [Article] [Google Scholar]
- HOWLETT J J. UH-60A black hawk engineering simulation program[R]. NASA-CR-166309, 1981 [Google Scholar]
- YUAN Ye, CHEN Renliang, LI Pan, et al. Rotor control strategy analysis of coaxial rigid rotor high-speed helicopter[J]. Journal of Northwestern Polytechnical University, 2017, 35(5): 915–921 [Article] (in Chinese) [Google Scholar]
- YAN Xufei, CHEN Renliang, XIN Ji. Helicopter landing trajectory optimization after tail rotor control failure in different collective pitch[J]. Journal of Northwestern Polytechnical University, 2019, 37(6): 1138–1147 [Article] (in Chinese) [CrossRef] [EDP Sciences] [Google Scholar]
- ZHOU Pan, CHEN Renliang, YU Zhiming. Analysis on controllability and stability of quad-tilt-rotor aircraft in helicopter mode[J]. Journal of Northwestern Polytechnical University, 2021, 39(3): 675–684 [Article] (in Chinese) [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- DUYAR A, GU Z, LITT J S. A simplified dynamic model of the T700 turboshaft engine[J]. Journal of the American Helicopter Society, 1995, 40(4): 62–70 [Article] [CrossRef] [Google Scholar]
- BALLIN M G. A high fidelity real-time simulation of a small turboshaft engine[R]. NASA-TM-100991, 1988 [Google Scholar]
- BALLIN M G. Validation of a real-time engineering simulation of the UH-60A helicopter[R]. NASA-TM-88360, 1987 [Google Scholar]
- JI Honglei, LU Linghai, WHITE M D, et al. Advanced pilot modeling for prediction of rotorcraft handling qualities in turbulent wind[J]. Aerospace Science and Technology, 2022, 123: 107501 [Article] [NASA ADS] [CrossRef] [Google Scholar]
All Tables
All Figures
|
图1 直升机/发动机耦合模型示意图 |
| In the text | |
|
图2 直升机/发动机耦合模型计算流程图 |
| In the text | |
|
图3 直升机模型配平计算结果 |
| In the text | |
|
图4 发动机稳态共同工作方程计算结果 |
| In the text | |
|
图5 直升机/发动机耦合模型动态响应结果(悬停) |
| In the text | |
|
图6 直升机/发动机耦合模型动态响应结果(前飞) |
| In the text | |
|
图7 扭矩响应曲线 |
| In the text | |
|
图8 样例直升机扭矩响应特性飞行品质等级 |
| In the text | |
|
图9 直升机垂向速度响应曲线 |
| In the text | |
|
图10 悬停状态高度响应拟合曲线 |
| In the text | |
|
图11 样例直升机高度响应飞行品质等级 |
| In the text | |
|
图12 总距操纵引起的偏航耦合动态响应计算结果 |
| In the text | |
|
图13 总距偏航耦合特性飞行品质等级 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.