| Issue |
JNWPU
Volume 42, Number 6, December 2024
|
|
|---|---|---|
| Page(s) | 1144 - 1151 | |
| DOI | https://doi.org/10.1051/jnwpu/20244261144 | |
| Published online | 03 February 2025 | |
Electromagnetic target detection model for unmanned aerial vehicle platforms based on Bayesian detection
基于贝叶斯检测的无人机平台电磁探测模型
PLA Information Engineering University, Zhengzhou 450000, China
Received:
25
December
2023
Abstract
Existing models for target detection on unmanned aerial vehicle platforms largely rely on the Boolean perception model. However, aiming at electromagnetic radiation sources, the Boolean perception model fails to accurately reflect the propagation and detection characteristics of electromagnetic wave signals. To address this issue, this paper, grounded in the Bayesian signal detection theory and utilizing the distributional characteristics of antenna pattern diagrams, constructs an electromagnetic detection model for unmanned aerial vehicle platforms. The performance of the novel model is derived and analyzed under a scanning coverage search algorithm. Analytical and simulation results indicate that the proposed model effectively describes the process of electromagnetic target detection. In coverage search tasks, when the unmanned aerial vehicle is equipped with the KSHA-BJ32-10-NH antenna, the new model has a shorter range compared to the Boolean perception model, and the advantage of the new model becomes more pronounced as the search area expands. The increase in the required range for the unmanned aerial vehicle to complete the task is only 85.41% of that of the traditional Boolean model.
摘要
现有的目标探测无人机平台建模大多基于布尔感知模型(Boolean perception model)。然而, 在针对电磁波辐射源的探测任务中, 布尔感知模型无法充分体现电磁波信号的传播与检测特性。为了克服这一局限性, 以贝叶斯信号检测理论为基础, 基于天线方向图的分布特性, 构建了无人机平台电磁探测模型, 并推导分析了新模型在扫描式覆盖搜索算法下的性能特点。分析与仿真结果显示, 新模型有效描述了电磁目标探测过程。在覆盖搜索任务中, 当无人机搭载KSHA-BJ32-10-NH型天线时, 相较于布尔感知模型, 新模型的航程更短。随着搜索区域的扩大, 新模型的航程优势愈加明显, 无人机完成任务所需航程的增速仅为传统布尔模型的85.41%。
Key words: unmanned aerial vehicle / electromagnetic radiation sources / target detection / Bayesian signal detection
关键字 : 无人机 / 电磁波辐射源 / 目标探测 / 贝叶斯信号检测
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
无人机凭借其卓越的机动性、灵活的组网能力和隐蔽行动等特点, 已成为农业、运输、灾害管理及军事领域中不可或缺的工具[1]。随着光电、无线电和雷达等技术的不断发展, 无人机在各类探测搜索任务中的重要性得到了进一步提升。
随着信息化设备的普及, 越来越多的目标具有了主动辐射电磁波特性(以下简称为电磁目标)。这些高价值目标在视觉层面经过精心伪装, 光学设备难以直接发现。当前, 关于无人机探测搜索任务的研究大多基于布尔感知模型[2–4]。布尔模型是一种简化的理论模型, 无法准确反映观测设备本身的工作参数、性能约束及外界环境对观测性能的影响, 对于观测区域的不确定性讨论不足。因此, 基于布尔感知模型开发的算法在电磁目标探测任务中适用性不佳。此外, 目前针对探测不确定性的研究主要集中于对特定观测过程的不确定性建模[5–6], 这导致这些研究成果在不同场景下的适用性和适应性还需进一步验证和提升。
受雷达和声呐领域探测平台建模的启发[7–9]本文将针对电磁探测无人机平台本身, 结合电磁波传播与衰减过程, 从探测原理出发展开对探测无人机模型的优化。
1 模型理论基础——基于贝叶斯理论的目标检测
贝叶斯信号检测的基本原理为: 通过建立概率感知模型, 利用观测数据更新对信号状态的估计, 实现对未知信号状态的检测。目标探测无人机对某处某目标存在性进行检测, 此时有2类可能事件:
事件H0: 目标不存在。
事件H1: 目标存在。
在无其他先验信息的情况下, 两者为真的可能性P(H0)=P(H1)=1/2。此时根据二元贝叶斯信号检测理论, 目标检测概率PD可由(1)式表示
 (1)
(1)
式中,η表示似然检测门限, 可由(2)式得到。Q[μ0]指标准高斯分布的右侧积分。
 (2)
(2)
式中,c表示判决代价因子,cij指事件j为真时, 判决事件i成立的代价。
无人机接收到的信号信噪比d2可由(3)式计算得出。
 (3)
(3)
式中:Pt为目标发射功率;N为噪声功率;L为空间自由损耗;GR为接收天线增益。由Hans Peter Friis的电磁波空间自由损耗公式, 可将(3)式进一步写为(4)式。
 (4)
(4)
式中:R为目标至探测无人机的距离;λ为电磁波波长。将(4)式代入(1)式得到目标检测概率计算公式。
 (5)
(5)
在实际应用中, 假设探测无人机安装主瓣垂直向下的定向接收天线, 则根据天线方向图, 接收天线增益GR将随着来波方向与天线法线夹角θ的变化而变化, 一般将其表示为GR(θ)。由于无人机飞行高度H、目标与无人机距离R、水平投影长度L、来波方向与天线法线夹角θ间具有明确的几何关系(见式(6)以及图 1), 可将GR(θ)转变为GR(R)。
 (6)
(6)
若采用最小平均误差准则或最大似然准则, 由先验概率及(2)式可计算出似然检测门限η=1[10]。此时, 检测概率PD可由(7)式表示。
 (7)
(7)
进而得出无人机探测模型,如图 2所示。
当无人机与目标距离小于RB时, 目标检测概率高于判定阈值。此时, 目标探测效果与布尔模型类似。即只要目标进入该区域内, 就能够被成功探测, 因此将该区域命名为“布尔区”。当二者间距大于RB时, 检测概率随着距离的增加而下降。此时, 检测概率的影响不可忽略, 因此称这部分区域为“概率感知区”。上述结论可由(8)式表达。
 (8)
(8)
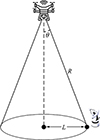 |
图1 无人机与目标方位参数示意图 |
 |
图2 基于贝叶斯检测的电磁目标探测无人机感知区域示意 |
2 接收天线特性与检测概率可视化
本节将结合具体天线, 利用MATLAB将模型的检测概率可视化。整个过程中涉及的参数见表 1, 无人机探测天线为KSHA-BJ32-10-NH [11]。图 3为该天线E面方向图(3 GHz)。
本文取[-64°, 64°]范围内的曲线并将之进行直角坐标转换, 将天线增益单位由分贝转换为倍数, 得到增益曲线如图 4所示。结合(6)式将角度换算为距离即可得到GR(R)。
参照上述方法以及表 1中的参数设置, 经计算机计算得到目标检测概率曲线如图 5所示。
为了方便计算, 假设天线方向图沿0°轴旋转对称, 则得到以探测无人机为中心的目标检测概率三维图,如图 6所示。
由图 5可知: 在垂直投影平面中, 若目标与探测无人机间距离大于L1且小于L2, 则其检测概率接近1, 这个范围对应为布尔区; 若目标距离超出这个范围, 则检测概率随着|L|的增大而减小且最小不低于50%。超出[L1, L2]的范围对应为概率感知区。检测概率越接近50%, 越难以确认目标的存在性, 因此图 5~6的纵轴均绘制至60%。
检测概率可视化参数设置
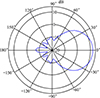 |
图3 KSHA-BJ32-10-NH型天线E面极坐标方向图(3 GHz) |
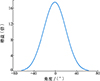 |
图4 KSHA-BJ32-10-NH型天线E面增益曲线(3 GHz) |
 |
图5 无人机电磁目标检测概率曲线 |
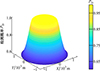 |
图6 目标检测概率三维图 |
3 电磁目标概率检测模型下的矩形区域路径规划
依据图 6中的检测概率分布, 对探测无人机进行路径规划时, 可以使无人机的概率感知区域多次掠过目标,从而通过多次检测提高检测概率。图 7为探测无人机对概率感知区内的目标进行多次检测的情况示意。无人机周边3个范围由小到大分别为:
1) 布尔感知范围: 以某固定的高检测概率值划分的范围。近似认为这个范围内的目标一定能被检测出来。
2) 等效探测范围: 利用概率感知区域进行多次扫描,使检测效果等效于布尔感知范围。实现此效果所需的最低检测概率被称为边界概率。边界概率所对应的检测范围为等效探测范围。
3) 概率感知范围: 以某固定的低检测概率值划分出的无人机概率感知范围, 认为这个范围以外的探测结果不具有参考性。
图 7中两探测无人机分别沿箭头方向飞行, 棕色区域为当前二者概率感知区的重叠部分。该区域内的目标此时经历了2次检测, 其最终存在概率应综合2次检测的结果给出。
若探测无人机对同一目标独立检测n次, 每次的探测到目标的概率分别为PD, 1, PD, 2, PD, 3, …, PD, n。那么最终目标的存在概率可通过(9)~(11)式计算。(注:PD, i=PD(Ri)由(8)式计算, Ri为第i次探测时无人机与目标的距离。)
设事件Bi表示第i次检测结果为目标存在,则多次检测下的目标存在概率为
 (9)
(9)
通过乘法法则和全概率公式可将(9)式改写为
 (10)
(10)
若在多次检测过程中, 第i次检测得到的检测概率大于等于图 2处提及的判定阈值则无需进行后续检测, 并参照布尔感知原理, 设置目标存在概率为1。得到最终多次检测下的目标存在概率。
 (11)
(11)
 |
图7 概率感知区多次扫描示意图 |
3.1 数学分析与证明
前文提到了利用概率感知区对目标进行多次扫描, 可以预见, 检测概率的叠加将扩大无人机的等效探测范围,如图 7所示。因此在搜索任务中的路径、能耗等均会优于已有布尔模型。下面将以典型覆盖搜索算法对矩形区域实施目标探测为例, 给出证明过程。
现有一长为a宽为b的矩形任务区域(a, b>0), 分别基于两模型, 利用扫描式及内螺旋路径规划算法在该区域执行目标搜索任务。要求全域检测概率不低于PD。证明所提模型路径低于布尔模型。
假设矩形区域与无人机探测范围满足以下约束:
约束1 布尔模型探测范围直径小于区域长边: 2LB < a;
约束2 概率模型探测范围直径小于区域长边: 2LP < a。
首先设定检测概率门限为PD, 依据布尔模型的原理, 可知其边界检测概率PD, B=PD并设其对应的探测距离为RB。
设概率模型的边界检测概率为PD, P, 其对应的等效探测距离为RP。那么, 当目标处于等效探测范围边界时: PD, 1=PD, 2=…=PD, n=PD, P。此时(10)式可以改写为
 (12)
(12)
当n=1时, PD, P=PD, B=PD。即, 此时概率感知模型与布尔模型的探测范围一样; 当n > 1时PD, P < PD, B=PD(值得注意的是, 在本次验证中涉及到的覆盖路径规划算法中, 目标最大重复检测次数n=2)。
由图 4和(6)式知, 在仅考虑天线方向图中主瓣范围的情况下, GR(R)随R的增加而减少, 那么  在相应范围内是单调递增函数, 而标准正态分布右侧积分函数Q[μ0] 在[0, + ∞)上是单调递减函数, 因此PD(R)在该范围内是单调递减函数。在利用重复扫描扩大等效探测范围时n>1, 因此PD, P < PD, B。即RP>RB。进一步, 依据(6)式和图 1得到俯视图投影检测半径L。
在相应范围内是单调递增函数, 而标准正态分布右侧积分函数Q[μ0] 在[0, + ∞)上是单调递减函数, 因此PD(R)在该范围内是单调递减函数。在利用重复扫描扩大等效探测范围时n>1, 因此PD, P < PD, B。即RP>RB。进一步, 依据(6)式和图 1得到俯视图投影检测半径L。
 (13)
(13)
在H不变时, 易得LP>LB。
3.2 基于扫描式路径的模型优势分析
基于扫描式路径的覆盖算法是当下最火热的覆盖路径规划算法之一[12–13], 且已有多位学者证明, 该路径是多边形区域下的最高效覆盖路径[14–15]。对于长为a宽为b的某矩形区, 利用“扫描式路径”进行区域覆盖, 情景示意见图 8。
值得注意的是, 扫描式路径无法在上下边界处利用重复扫描增大有效检测半径。因此在边界仍需要按照单次扫描要求进行路径规划,如图 8b)所示。
无人机执行覆盖搜索时的转弯次数Nturn可由(14)~(15)式计算。
 (14)
(14)
 (15)
(15)
化简(15)式可得
 (16)
(16)
式中,  是向上取整函数。
是向上取整函数。
那么无人机执行任务的总路程Sz为
 (17)
(17)
式中: 2L为无人机等效探测范围宽度; ak为无人机第k次沿垂直搜索区域宽度方向航行的行程; Nturn为覆盖所需转弯次数。在矩形中ak=a, (17)式可写为
 (18)
(18)
前文已证LP>LB, 通过(14),(16)式可得Nturn, B≤Nturn, P, 此时: a(Nturn, P+1) < a(Nturn, B+1);(18)式中余留项Nturn·2L表示无人机转弯时的纵向路径。
根据a, b, LB, LP的大小关系, 本文分3类情况进行讨论。
1) 当b < 2LB < 2LP < a:
此时由(14)式、(16)式得到Nturn=0。因此, Sz, B=Sz, P, 探测无人机无需转向, 如图 9所示。
2) 当2LB < b < 2LP < a:
此时, 由(16)式得到Nturn, P = 1。因此Sz, P = 2a+2LP < 3a。存在2种细分情况。
(1) 若b≤4LB, 由(14)式得到Nturn, B=1=Nturn, P。因此, Sz, B=2a+2LB < Sz, P, 无人机需要进行1次转向, 如图 10所示。
(2) 若b>4LB, 由(14)式得到Nturn, B>Nturn, P=1。又因为Nturn, B和Nturn, P都是整数, 此时Sz, B≥3a+4LB>3a>Sz, P, 如图 11所示。
3) 当2LB < 2LP < b < a:
此时, 由(16)式得到(Nturn, P, Nturn, B)≥1, 此时存在2种细分情况。
(1) 若由于取整, 导致转向次数相等Nturn, B=Nturn, P,此时: Sz, B-Sz, P=2Nturn(LB -LP) < 0。即Sz, B < Sz, P, 如图 12所示。
(2) 若Nturn, B > Nturn, P, Sz, B - Sz, P可表示为(Nturn, B + 1)a-(Nturn, P+1)a+(2Nturn, BLB-2Nturn, PLP), 又因为Nturn, B > Nturn, P, 所以(Nturn, B + 1)a-(Nturn, P+1)a≥a, 进而有
 (19)
(19)
结合(14)式、(16)式,可得
 (20)
(20)
缩小Nturn, B并放大Nturn, P,可得
 (21)
(21)
进一步可得到(22)式
 (22)
(22)
又因为a>b,所以有

得证Sz, B-Sz, P>0,即Sz, B>Sz, P。
此时, 由于新模型的横向路径更少, 总路程更少。相关示意图见图 8。
通过上述证明可以得知, 当采用扫描式路径时:
若b < 2LB < 2LP < a, Sz, B=Sz, P;
若2LB < b < 2LP < a且b>4LB, Sz, B < Sz, P;
若2LB < 2LP < b < a且Nturn, B=Nturn, P, Sz, B < Sz, P;
其余情况概率模型均优于布尔模型,即Sz, B > Sz, P。
在LB, LP不变时, 由(14)式、(16)式可知: 当b越大, Nturn, B增加速度越高于Nturn, P。由于2L < a, 结合(18)式可知, 影响总路径的主要因素为Nturn和a。借此推断, 区域宽度越大, 新模型优势越明显。
 |
图8 2类模型下的扫描式覆盖路径示意图 |
 |
图9 第1类情况示意图 |
 |
图10 第2类情况的细分情况1示意图 |
 |
图11 第2类情况的细分情况2示意图 |
 |
图12 第3类情况的细分情况1示意图 |
3.3 模型优势趋势仿真
假设存在一矩形区域, 将其长边固定为a=80 000 m, 通过改变矩形宽度b的大小对上述结论进行验证。设置布尔模型以检测概率90%为限认定有效检测范围。那么通过(12)式可知: 在概率模型下, 且边界存在二次扫描时, 单次检测概率为75%时达到与布尔模型同样的检测效果。参照第2节中的参数, 得出两模型的有效检测范围投影分别为半径LB=839.794 m, LP=991.966 m的圆形区域。验证结果如图 13所示。
图 13呈现以下特点:
1) 曲线整体呈现阶梯状。这是因为虽然b不断增大, 但是当现有路径仍然可以保证一定检测概率并完成对目标区域的覆盖时, 搜索航程不变。反之, 当现有路径不足以完成既定目标时, 搜索航程增加。
2) 圆圈标注的区域表示布尔模型覆盖路径低于概率模型的部分。其中, 绿色圆圈属于3.2节中第2类情况的细分情况1;红色圆圈区域属于3.2节中第3类情况的细分情况1, 这些情况中, 新模型下的路径长于布尔模型。
3) 随着矩形宽度增加, 概率模型的优势越发明显。这是因为概率模型的转向次数增长缓慢, 所以扫描路程增加速度低于布尔模型。在本文实验条件下, 概率模型航程增速仅是布尔模型的85.41%。当宽度达到79 900 m时, 概率模型的扫描路程相较于布尔模型短了14.3%。
上述特点与第3节的推导结果吻合。
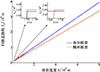 |
图13 模型优势对比图 |
4 结论
在电磁目标探测任务中, 基于布尔模型的无人机目标探测模型无法反映电磁波信号的传播与检测特性, 且存在边缘探测信息利用效率低下的问题。针对此问题, 本文提出了一种新型的概率感知模型, 该模型以贝叶斯信号检测理论为基础, 基于天线方向图的分布特性构建而成。不同类型天线以及不同的指向都让概率感知区和布尔区的形状及大小产生变化, 但这并不影响模型的合理性。为了便于后续的分析, 本文仅以特定的天线为例进行讨论。在实际应用中, 可根据设备实际搭载天线的具体参数, 设定相应的检测覆盖半径。
数学分析与证明环节中, 本文将扫描式路径规划算法应用于传统模型及新模型上, 以数学推导的方式验证了新模型的性能优势。得出了新模型的优势会随着目标区域的增大而进一步增强的结论, 并在3.3节的仿真中验证了该结论。
区别于现有模型通过设定检测概率阈值来设置探测范围, 新模型以贝叶斯检测为理论依据, 对电磁目标进行能量检测, 拓宽并细化了探测范围。新模型使无人机能够利用边缘探测信息, 从而在更短的航程和时间内完成电磁目标探测任务。该模型为利用无人机从电磁层面进行搜救和侦察提供了基础, 在军、民领域都具有广泛的应用前景。
值得注意的是, 本文所有的讨论都在视距条件下, 因此没有考虑天气或其他因素造成的信道变化问题。后续研究中拟针对具体信道进行讨论。
References
- LAGHARI A A, JUMANI A K, LAGHARI R A, et al. Unmanned aerial vehicles: a review[J]. Cognitive Robotics, 2023, 3: 8–22. [Article] [CrossRef] [Google Scholar]
- BUSHAW J D, TERRY C V, RINGELMAN K M, et al. application of unmanned aerial vehicles and thermal imaging cameras to conduct duck brood surveys[J]. Wildlife Society Bulletin, 2021, 45(2): 274–281. [Article] [CrossRef] [Google Scholar]
- CHENG Kaixin, WU Di, HU Tao, et al. Cooperative search optimization of an unknown dynamic target based on the modified TPM[J]. International Journal of Aerospace Engineering, 2022, 2022(1): 8561245. [Article] [Google Scholar]
- VATANA A, ZHIHUA Q, FRANK C, et al. A triangulation-based coverage path planning[J]. IEEE Trans on Systems, Man, and Cybernetics, Systems, 2018, 50(6): 1–13. [Article] [NASA ADS] [Google Scholar]
- KUZNETCOV I E, KUZNETCOV A A, BAKLANOV I O, et al. The probabilistic model of search and detection of ground objects using unmanned aerial vehicles in difficult weather conditions[J]. Journal of Physics: Conference Series, 2021, 1745(1): 012048. [Article] [NASA ADS] [CrossRef] [Google Scholar]
- TAN Ansheng, GUO Jianglong. Detection probability model of shipborne UAV electro-optical payload system[J]. Military Operations Research and Systems Engineering, 2012, 26(3): 73–76 (in Chinese) [Google Scholar]
- FU Ying, TANG Ziyue, SUN Yongjian. The 3D modeling and visualization of multi-AEW radar cooperative detection range[J]. Electronics Optics and Control, 2014, 21(2): 22–27 (in Chinese) [Google Scholar]
- SHENG Xueli, LI Pengfei, GUO Longxiang, et al. Optimization of unmanned clusters detection range based on probabilistic perception model[C]//2018 National Acoustics Congress Proceeding, 2018: 20–21 (in Chinese) [Google Scholar]
- LI Pengfei. Research on regional configuration optimization based on collaborative detection of underwater unmanned platforms[D]. Harbin: Harbin Engineering University, 2020 (in Chinese) [Google Scholar]
- LIANG Hong, YANG Changsheng. Modern signal detection and estimation theory[M]. Xi'an: Northwestern Polytechnical University Press, 2021 (in Chinese) [Google Scholar]
- VIRIDIANA E V, IRVING J V, CARLOS J H, et al. Coverage path planning for spraying drones[J]. Computers & Industrial Engineering, 2022, 168: 108125. [Article] [CrossRef] [Google Scholar]
- MUÑOZ J, LÓPEZ B, QUEVEDO F, et al. Multi UAV coverage path planning in urban environments[J]. Sensors, 2021, 21(21): 7365. [Article] [CrossRef] [Google Scholar]
- PENG Quan, ZHENG Xiaolong, YOU Hao, et al. A path planning algorithm for cooperative coverage of multiple UAVs[J]. Ship Electronic Engineering, 2020, 40(8): 44–48 (in Chinese) [Google Scholar]
- MA Yan, FENG Wei, LUO Rong, et al. Path planning for coverage search for submarines using fixed-wing UAVs in complex irregular sea area[J]. Acta Armamentarii, 2022, 43(suppl 2): 40–52 (in Chinese) [Google Scholar]
All Tables
All Figures
|
图1 无人机与目标方位参数示意图 |
| In the text | |
|
图2 基于贝叶斯检测的电磁目标探测无人机感知区域示意 |
| In the text | |
|
图3 KSHA-BJ32-10-NH型天线E面极坐标方向图(3 GHz) |
| In the text | |
|
图4 KSHA-BJ32-10-NH型天线E面增益曲线(3 GHz) |
| In the text | |
|
图5 无人机电磁目标检测概率曲线 |
| In the text | |
|
图6 目标检测概率三维图 |
| In the text | |
|
图7 概率感知区多次扫描示意图 |
| In the text | |
|
图8 2类模型下的扫描式覆盖路径示意图 |
| In the text | |
|
图9 第1类情况示意图 |
| In the text | |
|
图10 第2类情况的细分情况1示意图 |
| In the text | |
|
图11 第2类情况的细分情况2示意图 |
| In the text | |
|
图12 第3类情况的细分情况1示意图 |
| In the text | |
|
图13 模型优势对比图 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.