| Issue |
JNWPU
Volume 44, Number 1, February 2026
|
|
|---|---|---|
| Page(s) | 143 - 150 | |
| DOI | https://doi.org/10.1051/jnwpu/20264410143 | |
| Published online | 27 April 2026 | |
Non-coplanar orbit rendezvous control algorithm based on fixed-impulse single-pulse
基于定冲量单脉冲的异面轨道交会控制算法
Shanghai Aerospace Control Technology Institute, Shanghai 201100, China
Received:
14
April
2025
Abstract
To address the challenge of precise rendezvous in non-coplanar orbits, this study proposes an orbital maneuver method based on solid propulsion. The relationship between transfer duration and impulse magnitude is analyzed, and under the constraint of fixed impulse magnitude, the correlation between transfer duration and minimum rendezvous error is investigated. The transfer trajectory design problem is ultimately transformed into finding the minimum point of a single-valley function. A control solution framework for non-coplanar orbit rendezvous using fixed-impulse single-pulse propulsion is developed. The proposed workflow involves three key steps: first, calculating the time required for the target to coast inertially to a virtual intersection point; second, employing Lambert's algorithm to determine the minimum velocity increment; and third, integrating the golden section method with an optimal impulse guidance algorithm to precisely solve for transfer duration and impulse direction when the chaser's impulse exceeds the minimum increment. Simulation results demonstrate that the algorithm achieves high computational efficiency and rapid convergence, with a final rendezvous accuracy of 0.6 meters. This approach provides an effective solution for precision rendezvous tasks in non-coplanar orbit scenarios.
摘要
针对异面轨道精确交会问题, 提出了一种基于固体推进的轨道机动方法, 分析了转移时长与脉冲大小之间的关系, 并在脉冲大小固定的前提下, 研究了转移时长与最小交会误差间的关系, 最终将转移轨道设计问题转化为单谷函数极小值点的求解问题, 并设计了一种基于定冲量单脉冲的异面轨道交会控制求解流程。计算目标惯性滑行至虚交点所需时长, 采用Lambert算法求解最小速度增量, 若追踪星脉冲大于该增量, 则结合黄金分割法和最优脉冲制导算法精确求解转移时长和脉冲方向。仿真结果表明, 所提算法具有计算效率高、收敛速度快的特点, 实现了0.6 m的交会精度, 为异面轨道精确交会任务提供了一种有效的解决方案。
Key words: space rendezvous / fixed-impulse / impulse maneuver / optimal control
关键字 : 空间交会 / 定冲量 / 脉冲机动 / 最优控制
© 2026 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
随着空间碎片数量的增加与各国军事战略的调整,空间安全环境逐渐恶化,因此空间拦截技术成为当前研究的热点之一。空间拦截技术涵盖空天防御、在轨服务和太空碎片清除等多个领域,具有重要研究意义[1-4]。
脉冲推进作为轨道机动的核心手段,其转移轨道设计本质是经典的Lambert问题。大量学者提出了高效的解决算法,同时还考虑了轨道摄动力影响下的受摄Lambert问题[5-6]。在空间交会任务中,多脉冲机动轨道的能耗和时间最优是轨道设计的一个核心问题。Ottesen等[7]针对这个问题,采用了嵌入式边值求解方法,对航天器的轨迹进行优化,此方法在解决多约束下的非线性目标函数问题时展现出优秀的性能。Ding等[8]提出了一种遗传-序列二次规划相结合的方法,解决时间最省切向脉冲拦截问题,克服迭代初值敏感高的缺点。Oghim等[9]介绍了一种考虑地球非均匀引力扰动的实时拦截策略,提出了一种能耗最优的脉冲制导算法,以降低摄动引起的末端交会误差。另一方面,杜向南等[10]改进了单脉冲机动可达域求解算法,将其转化为可达位置矢量方向上的单变量极值求解问题,从而减少计算量。Luo等[11]研究了单脉冲拦截多目标问题,采用遍历和优化的方式设计拦截轨道,但未提出理论求解方法。夏存言等[12]针对共面轨道的单脉冲拦截多目标问题,提出了一种数值求解方法,将其转化为含有自由变量的非线性方程组,通过数值迭代算法求解。
上述研究主要是针对追踪星和目标位于同一轨道面的情况,部分学者对异面轨道交会控制问题也进行了研究。Zhang等[13]研究非共面椭圆轨道下的双脉冲最优交会问题,提出了采用数值优化算法求解含约束的多圈Lambert问题。Snyoll等[14]研究了含最小速度增量和等待时间约束的最优航天器交会问题,提出采用普适变量描述轨道,以简化求解过程。Luo等[15]提出采用遗传算法和牛顿法相结合的方法,以求解多脉冲多圈异面交会问题。其中遗传算法用于处理整数变量,而牛顿法用于处理实数变量。
然而,现有研究存在2个显著局限:①成果集中于共面轨道交会场景(如单脉冲可达域简化、多目标拦截遍历),对异面轨道交会的适应性不足;②传统方法均假设脉冲冲量可调,无法满足固体推进系统脉冲冲量固定的约束。固体推进系统凭借其独特优势具备显著高于液体推进的冲量密度在轨道机动领域备受关注,可实现能量的高效释放;紧凑型结构设计大幅降低系统复杂度,提升航天器载荷比;无活动部件与流体控制系统赋予更高的环境适应性和可靠性[16-18]。但其工作原理与液体推进存在本质差异:固体推进剂通过自持燃烧产生瞬时推力,在装药量预先固化的约束下形成不可调节的定值冲量,仅允许通过推力矢量控制调整脉冲方向。固体燃料的不可逆化学反应特性,对轨道控制算法提出要求:必须精准解算脉冲施加方向与转移时间窗口的匹配关系。
针对上述问题,本文聚焦固体推进系统在异面交会任务中的技术瓶颈,创新性提出基于定冲量单脉冲异面交会控制算法,攻克固体推进系统在异面交会场景下的精确控制难题。研究思路如下:首先,揭示转移时长与脉冲大小的单谷函数关系(具有唯一极小值点),将轨道设计转化为单谷函数极小值点的求解问题;然后,设计求解流程, 计算目标惯性滑行至虚交点的时长,采用Lambert算法求解最小速度增量,若满足约束则采用黄金分割法与最优脉冲制导算法,串行优化转移时长与脉冲方向; 最后,仿真结果表明,算法迭代17次即可收敛,交会精度达0.6 m,通过蒙特卡洛法验证了算法普适性与高效性,为固体推进系统提供高效解决方案。
1 问题描述与分析
假设目标与追踪星轨道面相异,且目标惯性滑行不进行轨道机动,追踪星采用固体推进方式变轨与目标交会。为了实现精确交会,本文设计了1套算法来计算脉冲方向,以确保追踪卫星能够精确地到达目标位置,并与其交会。
将交会点设置在目标轨道与追踪星停泊轨道面的交点附近,追踪星在t0时刻变轨与目标交会, 则追踪星变轨所需速度增量与转移时长的关系如图 1所示。分析可知, 当t < tf时, Δv随t增大而减小, 较长的转移时间允许追踪星采用小推力轨道面内机动方法, 通过缓慢调整轨道高度和相位降低能耗; 当t≥tf时, Δv随t增大而增大, 时间过长导致轨道面外机动需求激增, 需补偿累积的轨道面夹角漂移, 导致速度增量变大。即速度增量与转移时长的函数关系为单谷函数, 只存在一个极小值点(tf, Δvmin), 而此时的交会点恰好为目标轨道与追踪星停泊轨道面的交点, 其物理意义是追踪星仅进行轨道面内机动时, 速度增量最小, 转移轨道示意图如图 2中转移轨道(2)所示; 另一方面, 当追踪星的脉冲大小为Δv, 且大于Δvmin时, 存在t和t′ 2个转移时长, 可使追踪星与目标精确交会, 转移轨道示意图如图 2中(1)和(3)轨道所示, 第(1)条转移轨道的耗时更短。此外, 无论是转移轨道(1)还是(3), 追踪星与目标交会时都进行了轨道面外机动。
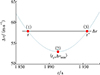 |
图1 速度增量与转移时长关系图 |
 |
图2 交会示意图 |
以转移时长t的解为例, 为便于分析, 假设固体推进剂提供的脉冲大小为Δv。结合上述分析可知, 当转移时长为t且脉冲方向满足最优条件时, 追踪星能够与目标实现精确交会; 反之, 若脉冲方向偏离最优值, 则会产生显著的交会误差。进一步研究表明, 在其他转移时长条件下, 即使脉冲方向经过优化调整, 追踪星与目标的交会误差仍会显著增大, 导致交会任务失败。这一现象产生的根本原因在于:固体推进系统的固定冲量特性使得追踪星的速度增量Δv无法精确匹配不同转移时长下的速度需求。这种速度增量的不匹配性凸显了固体推进系统在轨道机动中的独特约束, 同时也验证了精确求解转移时长与脉冲方向的重要性。
因此, 在脉冲大小固定的条件下, 且假设脉冲方向最优, 即末端交会误差最小, 则末端交会误差与转移时长关系如图 3所示。在[t0, tf]区间内, 二者之间的函数关系为单谷函数, 极小值点的转移时长为t, 恰好为所关注的解。其物理意义为, 转移时长为t时, 且在最优的脉冲方向下, 追踪星可与目标精确交会, 此时的交会误差为0。另一方面, 在[t, t′]区间内, 二者之间的函数关系为单峰函数, 转移时长为tf时, 末端交会误差最大, 即极大值点的转移时长为tf。
 |
图3 交会误差与转移时长关系图 |
综上所述, 基于定冲量单脉冲的异面轨道交会控制流程图如图 4所示。首先, 计算目标惯性滑行至虚交点所需的时长tf; 然后, 采用Lambert算法计算最小速度增量Δvmin; 若追踪星的脉冲大小Δv大于等于Δvmin, 则在[t0, tf]区间内采用黄金分割法和最优脉冲制导算法, 精确求解转移时长t和脉冲方向u, 以实现追踪星与目标的精确交会。
 |
图4 基于定冲量单脉冲的异面轨道交会控制算法流程图 |
2 最小速度增量求解
2.1 含J2项的动力学方程
在J2000坐标系下, 仅考虑地球扁率J2项的影响, 追踪星与目标的轨道动力学方程为:
 (1)
(1)
式中: μ为地球引力常数; r为航天器的地心距; f为地球扁率J2摄动加速度; 在J2000坐标系下fx, fy, fz为
 (2)
(2)
式中: Re为地球半径; J2为项摄动系数; x, y, z为追踪星或目标在J2000坐标系中坐标分量的大小。
2.2 最小速度增量对应的转移时长
研究表明, 目标惯性滑行到达虚交点与到达轨道面交点所需的时长一样, 但是, 由于目标受多种摄动项的影响, 其轨道参数一直在变化, 直接求解目标惯性滑行到达虚交点所需的时长较为困难。因此, 首先基于二体动力学模型求解初值, 之后基于含摄动项的动力学模型, 并在初值附近进行精确搜索。这样可以在考虑到多种摄动项影响条件下较为准确快速地求解转移时长。
基于二体动力学模型绘制目标与追踪星的轨道, 并将二者的轨道投影到地球所在球面上, 两轨道的交点称为虚交点[19], 如图 5所示。
 |
图5 虚交点 |
根据球面三角形的四元素公式, 确定虚交点的纬度幅角ut。
 (3)
(3)
式中: it为目标轨道的倾角; Ωt为目标轨道的升交点赤经; i为追踪星轨道的倾角; Ω为追踪星轨道的升交点赤经。
之后, 根据目标轨道的近地点幅角ωt, 计算虚交点的真近点角ft=ut-ωt。
最后, 根据开普勒方程求出无摄动情况下目标到达追踪星轨道平面所需的转移时长tf。
 (4)
(4)
式中: Me为平近点角; E为偏近点角; e为轨道的偏心率; T为轨道周期。
2.3 最小速度增量
根据上述所求的转移时长tf与目标末端位置rt(tf), 定义追踪星初始t0时刻状态为X(t0)=[r(t0); v(t0)], 采用Lambert算法计算出拦截轨道的初始速度v0+, 并计算出速度增量Δvmin。
3 最小速度增量求解
根据前面的分析可知, 追踪星的速度增量一定时, 对于任意转移时长, 存在最优的脉冲方向, 使得交会误差最小。
因此定义脉冲方向为u=[α; β]和目标函数
 (5)
(5)
式中: r(u)为追踪星脉冲机动后的位置; rt为交会点。
定义追踪星的状态转移矩阵 
 可表示为
可表示为
 (6)
(6)
 (7)
(7)
式中: Δv为追踪星速度增量的大小; α为脉冲方向的俯仰角; β为脉冲方向的方位角; ξ(u)为脉冲方向在J2000坐标系下的坐标分量。
定义性能函数为
 (8)
(8)
根据极值原理可得
 (9)
(9)
L(u)在u0处泰勒展开, 即
 (10)
(10)
忽略高阶小量ο2(u-u0)并将(12)式代入(11)式可得
 (11)
(11)
另一方面
 (12)
(12)
 (13)
(13)
定义
 (14)
(14)
 (15)
(15)
则(13)式化简为
 (16)
(16)
不难发现, 脉冲方向u的求取是一个不断迭代的过程, 因此定义迭代公式为
 (17)
(17)
迭代流程图为
 |
图6 最优脉冲制导算法流程图 |
4 黄金分割法
黄金分割法[20]是一种较好的数值分析方法, 特别适用于求解给定区间内单峰或单谷函数极值点的问题。黄金分割法是在等间隔分割法的基础上改进而来, 通过选取合适的分割点, 使得迭代次数减半, 同时不降低解的精度。
对于任意目标函数f(x), 若其在区间[x1, x2]内存在一极小值点x*, 则黄金分割法的计算步骤为:
1) 计算分割点x11=x2-C(x2-x1), x21=x1+C(x2-x1);
2) 计算分割点所对应的函数值f(x11)和f(x21),并比较: 若f(x11)≥f(x21), 则令x1=x11, x2=x21, 缩短搜索区间长度致d1=x2-x11, x12=x2-C(x2-x11), x22=x11+C(x2-x11); 反之, 则令x1=x1, x2=x21, 缩短搜索区间长度致d1=x21-x1, x12=x21-C(x21-x1), x22=x1+C(x21-x1);
3) 第i次迭代后, 判断区间长度是否满足di≤ε。若满足, 则跳转致步骤5);若不满足, 则继续迭代。其中ε代表求解精度, 为事先规定的小数;
4) 计算分割点所对应的函数值f(x12)和f(x22),并比较其大小, 之后按照步骤2)进一步缩短区间;
5) 截至区间确定后求解极值点 与其所对应的函数值f(x*)。
与其所对应的函数值f(x*)。
不难发现, 当 时, 步骤2)中若f(x11)≥f(x21), x12=x2-C(x2-x11)=x21; 反之, x22=x1+C(x21-x1)=x11, 即步骤4)中只需计算函数值f(x12)和f(x22)其中之一。
时, 步骤2)中若f(x11)≥f(x21), x12=x2-C(x2-x11)=x21; 反之, x22=x1+C(x21-x1)=x11, 即步骤4)中只需计算函数值f(x12)和f(x22)其中之一。
综上所述, 若追踪星的脉冲大于Δvmin, 则在[t0, tf]区间内, 首先采用黄金分割法确定转移时长t, 之后基于最优脉冲制导算法求取脉冲方向u, 若不满足修正量|Δu|≤δ, 则缩短区间并按上述方法继续迭代, 直至满足要求。
 |
图7 迭代流程图 |
5 仿真结果与分析
目标轨道与追踪星初始参数见表 1, 二者轨道间夹角为5°, 设置追踪星的脉冲大小60 m/s, 迭代误差阈值δ=10-4 rad, 根据上述算法, 求得转移时长为1 856.65 s, 脉冲方向为俯仰角65.1°、方位角11.5°。拦截过程中, 目标与追踪星的轨迹如图 8所示, 两者间相对距离如图 9所示, 交会误差为0.6 m, 可以看出追踪星能很好地完成与目标的交会任务, 体现了算法的优越性。
轨道参数
 |
图8 转移轨道 |
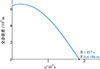 |
图9 相对距离 |
图 10展示了黄金分割法中, 转移时长的迭代误差随着迭代次数逐渐收敛的变化过程; 图 11展示了最优脉冲制导算法中交会误差随着迭代次数逐渐收敛的变化过程。分析结果可知, 在第2次到第7次的迭代过程中, 虽然转移时长保持不变, 但交会误差逐渐收敛, 这与本文优先迭代转移时长, 转移时长确定后迭代脉冲方向的流程相同。另一方面, 转移时长与脉冲方向同时收敛到最优值且迭代次数仅为17次, 表明算法具有稳定性和高效性。
 (18)
(18)
 |
图10 接近程度 |
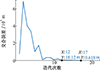 |
图11 交会误差 |
式中: di为第i次迭代接近程度参数;ti为第i次迭代所得的转移时长。
为进一步测试算法的稳定性,设置追踪星的脉冲大小60 m/s,迭代误差阈值δ=10-4 rad,采用蒙特卡洛方法,生成了100组追踪星和目标的初始状态,并运用本文提出的算法进行转移轨道的设计。结果显示,由于22组数据不满足脉冲大小大于等于最小值的限制,导致无法求解;而对于78组满足脉冲大小大于等于最小值的情形,平均迭代次数16.2,最大交会误差为15.14 m,最小交会误差为0.05 m,平均交会误差5.1 m,均方根误差6.3 m,如图 12所示。若进一步降低迭代误差阈值至1×10-5 rad,仿真显示平均交会误差可降至0.78 m,但会增加约40%迭代时间。
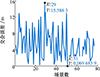 |
图12 交会误差(蒙特卡洛法) |
6 结论
本文提出一种基于固体推进的轨道机动方法,用于实现与空间目标的精确交会。通过系统的理论分析与建模,将固体推进的轨道机动特性等效为固定冲量的单次脉冲控制问题,并将转移轨道设计问题转化为单谷函数极小值优化问题。具体而言,所提出的算法流程包括以下关键步骤:首先,计算目标惯性滑行至虚交点所需的时间;然后,利用Lambert算法求解最小速度增量;最后,当追踪星的脉冲冲量大于最小速度增量时,在限定时间区间内结合黄金分割法与最优脉冲制导算法,精确求解最优转移时长和脉冲方向,从而实现高精度交会。仿真实验结果表明,该算法具有计算效率高、收敛速度快的特点,最终交会精度达到0.6 m,充分验证了方法的有效性。为固体推进系统在空间目标交会任务中的应用提供了可靠的理论基础和技术支撑,可广泛应用于在轨服务、空间碎片清除等相关领域。
References
- Xie L, Zhang Y, Xu J. Optimal two-impulse space interception with multiple constraints[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(7): 1085–1107 [Google Scholar]
- Tu Fanqing, Yang Hongwei. Trajectory optimization method for low-thrust collision avoidance under J2 perturbation[J]. Flight Control & Detection, 2025, 8(2): 27–39 (in Chinese) [Google Scholar]
- Han Yaokun, Chen Qifeng. Orbit design and simulation of omnidirectional long-term formation-flying satellite clusters[J]. Flight Control & Detection, 2020, 3(3): 33–39 (in Chinese) [Google Scholar]
- Xu Hao, Deng Xin, Liao Xueyang, et al. A review of SDRE control methods for spacecraft[J]. Flight Control & Detection, 2024, 7(5): 30–49 (in Chinese) [Google Scholar]
- Shen H, Tsiotras P. Using battin′s method to obtain multiple-revolution lambert′s solutions[J]. Advances in the Astronautical Sciences, 2003, 116: 1067–1084 [Google Scholar]
- Yang B, Li S, Feng J, et al. Fast solver for J2-perturbed lambert problem using deep neural network[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(5): 875–884. [Article] [Google Scholar]
- Ottesen D, Russell R P. Unconstrained direct optimization of spacecraft trajectories using many embedded Lambert problems[J]. Journal of Optimization Theory and Applications, 2021, 191: 634–674. [Article] [Google Scholar]
- Ding W, Li X, Yang H. Research on minimum time interception problem with a tangent impulse under relative motion models[J]. International Journal of Aerospace Engineering, 2019, 2019: 8912835 [Google Scholar]
- Oghim S, Leeghim H, Kim D. Real-time spacecraft intercept strategy on J2-perturbed orbits[J]. Advances in Space Research, 2019, 63(2): 1007–1016. [Article] [Google Scholar]
- Du Xiangnan, Yang Zhen. An algorithm for solving spacecraft reachable domain with single-impulse maneuvering[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(6): 1621–1631 (in Chinese) [Google Scholar]
- Luo Y Z, Shen H X, Huang A Y, et al. GTOC X: results and methods of National University of Defense Technology and Xi′an Satellite Control Center[C]//Proceedings of AAS/AIAA Astrodynamics Specialist Conference, 2019. [Google Scholar]
- Xia Cunyan, Zhang Gang, Geng Yunhai. Coplanar multi-target interception with a single impelse[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(3): 352–362 (in Chinese) [Google Scholar]
- Zhang G, Zhou D, Mortari D. Optimal two-impulse rendezvous using constrained multiple-revolution lambert solutions[J]. Celestial Mechanics and Dynamical Astronomy, 2011, 110(4): 305–317. [Article] [Google Scholar]
- Snyoll O, Sung-Hoon M, Henzeh L. Optimal spacecraft rendezvous by minimum velocity change and wait time[J]. Advances in Space Research, 2017, 60(6): 1188–1200. [Article] [Google Scholar]
- Luo Y Z, Li H Y, Tang G J. Hybrid approach to optimize a rendezvous phasing strategy[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 185–191. [Article] [Google Scholar]
- Lu Zhengliang. Study on mass moment attitude control for fast orbit maneuver satellite[D]. Nanjing: Nanjing University of Science and Technology, 2018. (in Chinese) [Google Scholar]
- Sathiyanathan K, Lee R, Chesser H, et al. Solid propellant microthruster design for nanosatellite applications[J]. Journal of Propulsion and Power, 2011, 27(6): 1288–1294. [Article] [Google Scholar]
- Mueller J. Thruster options for microspacecraft-a review and evaluation of existing hardware and emerging technologies[C]//33rd Joint Propulsion Conference and Exhibit, 1997: 3058. [Google Scholar]
- Wei Pengtao, Lei Gang, Guo Hongna, et al. Orbit interception at virtual crossing point based on lambert transfer[J]. Flight Dynamics, 2012, 30(6): 556–559 (in Chinese) [Google Scholar]
- Kheldoun A, Bradai R, Boukenoui R, et al. A new golden section method-based maximum power point tracking algorithm for photovoltaic systems[J]. Energy Conversion and Management, 2016, 111: 125–136. [Article] [Google Scholar]
All Tables
All Figures
|
图1 速度增量与转移时长关系图 |
| In the text | |
|
图2 交会示意图 |
| In the text | |
|
图3 交会误差与转移时长关系图 |
| In the text | |
|
图4 基于定冲量单脉冲的异面轨道交会控制算法流程图 |
| In the text | |
|
图5 虚交点 |
| In the text | |
|
图6 最优脉冲制导算法流程图 |
| In the text | |
|
图7 迭代流程图 |
| In the text | |
|
图8 转移轨道 |
| In the text | |
|
图9 相对距离 |
| In the text | |
|
图10 接近程度 |
| In the text | |
|
图11 交会误差 |
| In the text | |
|
图12 交会误差(蒙特卡洛法) |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.