| Issue |
JNWPU
Volume 44, Number 1, February 2026
|
|
|---|---|---|
| Page(s) | 17 - 26 | |
| DOI | https://doi.org/10.1051/jnwpu/20264410017 | |
| Published online | 27 April 2026 | |
Dynamic analysis of nose landing gear shimmy considering hydraulic damping characteristics
考虑油液阻尼特性的前起落架摆振动力学分析
1
State Key Laboratory of Mechanics and Control for Aerospace Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
2
Key Laboratory of Fundamental Science for National Defense-Advanced Design Technology of Flight Vehicle, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
Received:
28
April
2025
Abstract
Large and medium-sized aircraft widely employ nose wheel hydraulic steering systems to achieve steering control and shimmy suppression. The damping characteristic of the steering system is the core factor for effective shimmy control of the nose landing gear, directly influencing its dynamic performance. In order to investigate the influence of the hydraulic characteristics of the steering system on the shimmy behavior of the nose landing gear, this paper establishes the hydraulic model of the nose wheel steering system and the dynamic shimmy model of the nose landing gear for a specific aircraft type. Through simulation analysis, the oil damping torque characteristics of the hydraulic system and its coupling with the Coulomb friction torque are discussed, and the time-frequency dynamic characteristics of the front wheel swing angle under the anti-swing state are further studied. The results indicate that: The hydraulic damping of the steering system exhibits significant nonlinear characteristics during shimmy suppression. Appropriately increasing the system's Coulomb friction torque can effectively compensate for the limitations arising from the nonlinearity of the hydraulic damping. This research provides valuable references for optimizing the damping parameter design of steering systems and offers important engineering guidance for improving ground taxiing stability.
摘要
大、中型飞机广泛采用前轮液压操纵系统, 以实现前轮转向的控制和对摆振现象的抑制。操纵系统的阻尼特性是实现飞机前起落架摆振有效控制的核心, 会直接影响起落架的动力学性能。为探究油液阻尼对前起落架摆振特性的影响, 以某型飞机为研究对象, 分别建立了前轮操纵系统的液压模型和前起落架摆振动力学模型。通过仿真分析, 探讨了液压系统的油液阻尼力矩特性及其与库仑摩擦力矩的耦合作用, 并进一步研究了减摆状态下前轮摆角的时频动态特性。结果表明: 液压操纵系统的油液阻尼在减摆状态下具有显著的非线性特性, 适当增大系统的库仑摩擦力矩可以有效补偿液压系统阻尼非线性的不足, 为操纵系统阻尼参数的优化设计提供重要参考, 有助于提升飞机的地面滑跑稳定性。
Key words: nose landing gear / shimmy / hydraulic control system / nonlinear damping / frequency domain analysis
关键字 : 前起落架 / 摆振 / 液压操纵系统 / 非线性阻尼 / 频域分析
© 2026 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
摆振是指在飞机地面滑跑过程中,起落架受到地面扰动后,产生的一种由支柱侧向运动与围绕支柱的扭转运动相互耦合的剧烈自激振动[1]。飞机摆振现象的发生会导致机身产生强烈振动,严重时会导致起落架结构损伤,甚至引发灾难性的事故[2]。由于飞机机体、起落架和道面共同构成了一个复杂的耦合动力学系统,摆振现象的产生涉及起落架刚度、机身局部刚度、外部扰动、间隙等多种因素[3],但产生摆振的根本原因是扭转阻尼的不足[4]。因此仅通过优化起落架的结构设计参数难以实现有效减摆,加装减摆阻尼器成为了防摆的关键措施[5]。
国内外学者针对起落架的减摆阻尼问题开展了大量研究。Gordon等[6]采用多重尺度分析方法,研究了速度平方项阻尼对摆振动力学的影响;Grossman[7]通过分段线性化的方法,重点研究了库仑摩擦力、结构间隙等非线性因素对前轮摆振稳定性的影响;Rahmani和Behdinan[8]研究了一种扭矩连杆阻尼器相关参数对摆振稳定性的影响情况,并得到了稳定性边界;She等[9]研究了电磁阻尼器的阻尼性能,并根据减振过程中的功率流,确定了阻尼系数的计算方式;诸德培[10]编著了《摆振理论及防摆措施》一书,介绍了油液减摆器的构造形式,并分析了相应的减摆阻尼计算方式;顾宏斌等[11]采用液压减摆器的流体力学模型替代了摆振分析中常用的线性或二次阻尼,对飞机机轮的摆振问题进行了分析;洪煜清等[12]建立了起落架摆振数学模型,并针对传统油液阻尼减摆器,采用等效线性模型得到摆振临界稳定阻尼曲线的上下边界,为减摆阻尼器设计提供了参考;王格等[13]针对某型无人机前起落架,计算了起落架防摆必需参数和减摆器当量线性阻尼,验证了减摆器的可行性。上述研究采用不同的数学模型针对起落架的减摆阻尼进行了理论计算研究,但是在模型建立、参数分析和计算精度等方面存在局限性,使研究结果与实际工程应用之间存在一定差距。
随着多体动力学仿真技术的发展和应用,起落架摆振性能的研究得以在更加真实、便捷的环境下进行。Fong等[14]基于多体动力学软件开展了飞机起落架系统摆振问题的相关研究;刘刚[15]通过动力学仿真软件进行了摆振动力学仿真,确定了有效防止前轮摆振的最小线性阻尼系数;杜进等[16]基于仿真软件,建立了减摆器液压模型和前起落架摆振动力学模型,分析了油液压缩性对活塞式减摆器阻尼性能的影响;郑悫等[17]在仿真软件中,分析了油液弹性模量对于液压减摆器产品阻尼特性的具体影响。目前,关于摆振动力学的仿真研究已从简单的线性阻尼模型发展为考虑液压系统的复杂模型,但对油压阻尼作用下的摆振动力学响应尚缺乏深入研究。现今大多数大、中型飞机都通过操纵前轮偏转来改变或保持飞机的滑跑方向,采用前轮操纵系统提供操纵力矩和减摆阻尼力矩[10]。然而现有针对这种液压操纵系统的摆振动力学仿真分析,大多仍简单地将减摆系统简化为线性阻尼元件。该模型虽然计算较为方便,但无法准确反映油液在不同工作条件下的复杂非线性特性。相比之下,考虑液压阻尼特性的建模分析方法能够更真实准确地描述起落架的动态响应情况。
本文以某型飞机的齿轮齿条式前轮液压操纵系统及前起落架为研究对象,分别建立了前轮操纵系统的液压模型和前起落架摆振动力学模型;重点探讨了液压系统的非线性阻尼特性,以及其与库仑摩擦对摆振特性的耦合影响;之后通过多工况仿真分析,研究了液压系统阻尼作用下前轮摆振的时频动态特性,对提高起落架系统的可靠性具有重要的工程指导价值。
1 操纵减摆系统工作原理及建模
1.1 前轮液压系统工作原理
前轮液压操纵系统具有操纵转弯和减摆2种工作模式,分别对应系统的2条工作回路[18],如图 1所示。
 |
图1 液压操纵系统原理图 |
在操纵状态下,飞机无论是进行直线滑跑,还是转弯操纵,均有可能出现摆振的情况[18]。作动筒两边由高压油支撑,当支柱相对转动时,会有一个较大的扭转阻力,阻碍起落架前轮自由偏转。
当前轮操纵系统切换到减摆状态时,液压回路中的作动筒和减摆阀(由阻尼孔和回填阀构成)组成了系统的减摆回路。在外部激励作用下,作动筒活塞发生运动,从而使油液通过减摆阀的阻尼孔产生阻尼。
在操纵减摆器中, 减摆状态下的阻尼主要由节流活门提供, 如图 2所示。断面1直径为d1, 横截面积为S1;节流孔直径为d0, 面积为S0;液流收缩后的有效面积为Sc。
 |
图2 节流活门 |
由能量方程可知
 (1)
(1)
式中: p1, pc分别为断面1和断面c的绝对压力; α1, α2分别为断面1和断面c的动能修正系数, 层流取2, 湍流取1;V1, Vc分别为断面1和断面c的截面平均流速; ρ为油液密度; ξc为节流孔的阻力系数。
因为油液的流量沿程不变(油液泄漏量较小, 忽略其影响), 由连续方程可知
 (2)
(2)
由(1)~(2)式可以推导出
 (3)
(3)
 (4)
(4)
式中:Q为油液流量; cV为速度系数; cc为液流收缩系数; Δp为断面1和断面c的压力差; ρ为油液密度; c为流量系数, 且c=cccV。
流经孔口的压力降为
 (5)
(5)
式中, V0为油液流经阻尼孔的速度。
减摆器油液阻尼力矩为
 (6)
(6)
式中:M为油液阻尼力矩; S为作动筒活塞面积; R为阻尼力的作用力臂; V为作动筒活塞运动速度;  为前轮摆动角速度,
为前轮摆动角速度,  =V/R。
=V/R。
一般减摆器阻尼力矩有(7)式所示规律。
 (7)
(7)
式中:M0为库仑阻尼力矩; h1为线性项阻尼系数; h2为二次项阻尼系数。
采用等效功量法对减摆器阻尼进行线性化处理, 得到减摆器的当量阻尼。根据文献[10]可知, 一般取当量系数的极小值进行防摆计算。在计算中略去油路的沿程损失, 因此h1=0。最小当量线性阻尼系数为
 (8)
(8)
1.2 前起落架仿真模型建立
在有限元软件中, 对前起落架的主要承力部件进行柔性化处理, 替换原有的刚体部分。由于部件柔性的存在, 原有恒定的轴线和接触面不再适用圆柱副, 需要对刚体建模中活塞杆与支柱外筒之间原有的圆柱副进行修改, 采用点线柔-柔接触模型, 分别施加于活塞杆和支柱外筒上, 并通过接触面上的蜘蛛网格传递作用力。
在动力学仿真软件中, 将柔体的有限元模型通过铰链或力元素和其他刚体模型连接起来, 从而建立一个高保真的前起落架动力学仿真模型,如图 3所示。
 |
图3 前起落架柔性体仿真模型 |
为提高模型的准确性, 对起落架动力学模型进行模态校核。通过调整起落架参数及刚柔耦合连接等方法, 对模型进行修正和验证, 保证模型具有较高的计算精度。将本文所建模型的仿真结果与试验结果进行对比验证, 如表 1所示。
起落架模态校核结果
1.3 液压系统仿真模型建立
通过对飞机前轮操纵液压系统基本控制回路和液压元件功能的分析, 搭建齿轮齿条式液压操纵系统的仿真模型,如图 4所示。
 |
图4 液压操纵系统仿真模型 |
基于起落架动力学模型与液压控制系统模型, 设置2个平台的联合接口, 实现2个平台间的操纵力矩和前轮转角、转动角速度的数据实时传递, 完成3D-1D联合仿真, 从而开展不同工况下的前起落架摆振动力学特性分析。
2 液压系统非线性阻尼特性分析
2.1 液压系统油液阻尼力矩特性分析
据文献[10]可知, 减摆器的阻尼测试方法通常有振动加载法和恒定加载法2种。在本节的仿真过程中, 通过模拟振动加载法来进一步确定液压系统的阻尼特性, 减摆器的输入信号为x=Asin(ωt), 即前起落架支柱的转角运动以正弦形式变化。
在激振频率为1 Hz, 角度振幅为3°工况下的液压系统阻尼力矩与角速度的时域曲线如图 5所示。
 |
图5 阻尼力矩和角速度的时域曲线 |
从图 5可以看出, 阻尼力矩的峰值点相较于角速度的峰值点存在一定滞后, 滞后时间为0.011 s, 滞后角为3.96°。这种滞后现象主要是由于油液流动时需经过减摆阀的阻尼孔, 油液的可压缩性使其通过阻尼孔时需要克服一定的体积弹性模量, 导致流量响应滞后于输入信号。此外, 在角速度换向点附近, 即液压油换向时, 阻尼力矩响应变得尤为缓慢。这主要是液压油的流动特性和惯性效应所导致。当角速度换向时, 液压油的流动方向被迫发生改变。由于液压油本身具有质量, 其流动具有惯性, 油液在换向时需要一定时间来调整流动方向和速度, 从而导致其在换向时响应变慢。
由于阻尼力矩是角速度的函数, 为进一步研究阻尼力矩与角速度的关系, 本文针对一个完整运动周期内的阻尼力矩和角速度的动态响应结果进行了仿真分析, 如图 6~7所示。
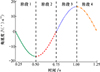 |
图6 角速度阶段曲线 |
 |
图7 阻尼力矩-角速度曲线 |
结合图 6~7可知, 系统的油液阻尼力矩与角速度呈现典型的非线性关系, 且在角速度增加(加速过程)和减小(减速过程)时表现出明显的不对称性。这一现象的主要成因可归结于阻尼介质的动态响应特性。在加速阶段, 阻尼介质的惯性参数和滞后响应参数共同作用导致阻尼力矩的增长滞后于角速度的变化。具体而言, 流体的惯性效应以及摩擦介质的迟滞特性使阻尼力矩不能及时跟随角速度增大而相应增大, 从而产生非线性关系。而在减速阶段, 能量耗散的相关参数, 如黏滞阻尼系数、涡流损耗系数等, 其非线性变化使得阻尼力矩的衰减速率通常与加速阶段不同。这些参数的非线性变化导致阻尼力矩与角速度之间形成滞回环, 这一特征直观地反映在图 7的曲线轨迹上。
由于这种非线性特性, 系统可能在一定的扰动下进入一种稳定的振荡状态。在这种状态下, 阻尼力矩不仅无法有效抑制振荡, 反而在一定程度上维持了振荡的持续进行。
2.2 不同阻尼孔直径下的摆振特性分析
液压系统在减摆状态下的阻尼主要由阻尼孔提供。作为系统的核心阻尼元件, 阻尼孔直径直接影响液压油的流动特性, 进而显著影响系统的动态响应。本文主要研究了阻尼孔直径对前轮摆振特性的影响, 并分析了液压系统中其他相关参数的协同响应情况, 仿真结果分别如图 8和表 2所示。
 |
图8 不同阻尼孔下的摆角曲线 |
起落架模态校核结果
从图 8可以看出, 随着阻尼孔直径的减小, 前轮摆角的收敛性整体上得到了增强。当阻尼孔直径为2 mm和3 mm时, 系统表现出良好的阻尼特性, 前轮摆角迅速收敛至稳态值, 收敛时间分别为0.3 s和0.7 s, 且无残余振荡。当阻尼孔过大(≥4 mm)时, 流经阻尼孔的流量增大, 但液压阻尼力不足, 因此前轮摆角迅速收敛, 但无法收敛至稳定状态, 出现小角度等幅振荡现象, 且阻尼孔直径越大等幅振荡的角度越大, 其中阻尼孔直径为4 mm时等幅振荡角度为0.15°, 阻尼孔直径为5 mm时等幅振荡角度为0.27°; 当阻尼孔过小(如1 mm)时, 由于节流效应过强使流量受限, 阻尼比减小, 前轮摆角的收敛效果变差, 收敛时间延长。
由表 2可知, 随着阻尼孔直径逐渐减小, 流经阻尼孔的油液流量呈现出明显的减小趋势; 同时, 稳定状态下回填阀下游的压力逐渐增大; 阻尼孔直径减小导致流经阻尼孔的油液压降增大, 使作动筒两端的压力差和阻尼力矩增大, 从而导致前轮最大摆角减小。
2.3 油液阻尼与库仑摩擦的耦合分析
在起落架支柱的扭转动力学分析中, 库仑摩擦力矩是一个关键因素。当接触面之间发生相对滑动且存在足够接触力时, 库仑摩擦会产生一个与运动方向相反的力矩, 有效地消耗能量, 从而对系统的运动状态产生显著影响。为便于数值计算并解决角速度在零点处的不可导问题, 本文采用反正切函数对库仑摩擦力矩进行连续近似[19]。
 (9)
(9)
式中: Mf为库仑摩擦力矩的大小; k为无量纲系数, 本文取1 000。
基于阻尼孔直径为4 mm的液压操纵系统, 施加不同大小的摩擦力矩进行摆振动力学仿真分析, 得到如图 9所示的仿真结果。如图 9所示, 库仑摩擦力矩可以增强系统的稳定性。对于小角度振荡的系统, 随着库仑摩擦力矩的增大, 系统的振荡角度逐步减小, 其中当库仑摩擦力矩从0增大至20 N·m时, 振荡角度由0.15°减小至0.1°。当库仑摩擦力矩增大至临界值(30 N·m)时, 系统由等幅振荡状态转变为稳定状态。随着库仑摩擦力矩的继续增大, 系统的稳定性进一步增强, 收敛时间也随之缩短, 当库仑摩擦力矩从30增大至80 N·m时, 收敛时间由0.63 s缩短至0.27 s。
 |
图9 不同库仑摩擦力矩下的摆角曲线 |
因此, 适当增大系统的库仑摩擦力矩可以有效补偿液压系统阻尼非线性的不足, 增大阻尼孔设计的容错性, 协助增强系统的稳定性。
3 考虑液压特性的摆振动力学分析
3.1 不同阻尼下的摆振动态响应对比分析
在实际工程中, 阻尼孔直径通常在设计阶段就已固定, 难以根据不同的工况进行实时调节。为深入研究油液阻尼对前起落架动态响应特性的影响, 本文在同一液压系统条件下, 针对不同滑跑速度开展了摆振动力学仿真。在仿真过程中, 通过对活塞杆施加瞬时侧向激励, 模拟地面的冲击载荷, 从而使飞机起落架前轮在滑跑过程中产生一个3°的初始偏转角度。
如图 10所示, 随着飞机速度增加, 系统的稳定性先减弱后增强。当飞机速度为20 m/s时, 前轮摆角的稳定性最差, 前轮摆角收敛至稳定状态所需的时间最长。
 |
图10 不同飞机速度下的摆角曲线 |
为了研究不同阻尼模型对系统摆振特性的影响差异, 本文选取10 m/s飞机滑跑速度工况, 在相同激励条件下, 针对线性阻尼和油液阻尼作用下的摆角动态响应曲线进行了对比分析, 结果如图 11~12所示。根据图 11~12可知, 在传统的线性阻尼作用下, 摆角振动频率不随时间变化, 此时摆角振动频率主要由起落架自身的惯量和刚度决定。
 |
图11 不同阻尼模型下的摆角振动曲线 |
 |
图12 不同阻尼模型下的摆角频谱图 |
然而, 在油液阻尼作用下, 由于减摆回路中液压刚度以及非线性阻尼系数的存在, 摆角在初始阶段以高频收敛, 当摆角收敛至某一小角度后转为低频收敛。这是由于在激励作用瞬间, 起落架产生一个较大的摆角和角速度, 因此在摆角收敛初期, 作动筒活塞位移较大, 此时液压缸容腔形成的液压刚度较大, 从而提高了振动频率; 与此同时, 与速度平方项相关的非线性阻尼系数使阻尼力矩显著增强, 加速能量耗散, 推动摆角快速收敛。
因此, 油液阻尼作用下摆角的动态响应过程分为3个特征阶段: 过渡段(高频快速收敛阶段)、渐进稳定段(低频渐进收敛阶段)、稳定段(稳定平衡阶段)。
本文针对不同滑跑速度下的摆振频率特性进行了进一步分析, 结果如图 13所示。
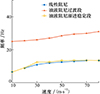 |
图13 不同阻尼的频率-速度曲线 |
由图 13可以看出, 随着飞机速度的增加, 摆振频率逐渐增大。在油液阻尼作用下渐进收敛段的摆角收敛频率与线性阻尼下的摆角收敛频率基本一致, 这表明在渐进收敛段, 系统的响应由线性阻尼主导。然而, 油液阻尼在高频范围内的表现与线性阻尼下存在显著差异, 此时非线性阻尼起主要作用。特别是在高速阶段, 油液阻尼在高频区域的特性对摆振的抑制作用更加明显, 进一步证实了考虑液压特性进行摆振动力学分析的必要性。
3.2 油液阻尼作用下初始摆角的影响分析
为了深入研究不同初始摆角下的摆振动力学特性, 通过调整侧向激励的大小, 改变飞机前轮的初始偏转角, 进行摆振动力学仿真, 得到如图 14~16所示的仿真结果。
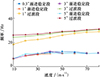 |
图14 不同初始摆角的频率-速度曲线 |
 |
图15 飞机速度10 m/s下不同初始摆角的振动曲线 |
 |
图16 飞机速度10 m/s下不同初始摆角的频谱图 |
从图 14~16可以看出, 随着机轮初始偏转角的减小, 摆角在过渡段的收敛频率逐渐减小, 且低速时变化最明显。与初始摆角为3°相比, 初始摆角为5°的过渡段振动频率在飞机速度为10 m/s时增大6.12%, 在飞机速度为80 m/s时增大1.64%;初始摆角为1°的过渡段振动频率在飞机速度为10 m/s时减小24.45%, 在飞机速度为80 m/s时减小4.92%。
在不同初始偏转角下, 摆角在渐进稳定段的收敛频率变化不大。该频率主要由起落架的结构特性决定, 与激励和液压系统无关。并且当机轮初始偏转角减小为0.3°时, 时域响应仅表现为低频收敛。
除此之外, 在相同飞机速度条件下, 机轮初始摆角越大, 液压阻尼的高频收敛特性越显著。
3.3 油液阻尼作用下轮胎力学特性的影响分析
轮胎力学性能是影响起落架摆振稳定性的关键参数[20]。根据(10)式可知, 轮胎的垂向载荷和充气压力会直接影响轮胎下沉量, 进而改变轮胎触地面半长和松弛长度等参数, 从而使轮胎的力学性能发生变化。本文针对不同轮胎充气压力和垂向载荷下的前起落架摆振稳定性进行了仿真分析。
航空轮胎计算经验公式为[21]
 (10)
(10)
式中:δ为轮胎在垂向载荷下的下沉量; Fz为轮胎垂向载荷; pr为轮胎的额定充气压力; p为轮胎的实际充气压力; W为轮胎的充气断面宽度; d为轮胎的充气外直径。
为研究轮胎压力对前起落架摆振稳定性的影响,本文基于轮胎额定充气压力0.7 MPa,分别选取实际充气压力为0.5, 0.7和0.9 MPa进行仿真分析,得到减摆状态下前起落架的时域曲线和频率-速度曲线,如图 17~18所示。
 |
图17 不同轮胎压力下的摆角曲线 |
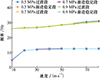 |
图18 不同轮胎压力下的频率-速度曲线 |
由图 17~18可知,在额定胎压附近,随着轮胎压力增大,前轮摆角在过渡段的收敛速度有所减慢,收敛频率略有减小;而在渐进稳定段的收敛趋势基本一致。除此之外,不同胎压下的摆角频率-速度曲线变化不大。
为研究垂向载荷对前起落架摆振稳定性的影响,本文分别取前起当量质量为4 000, 6 000和8 000 kg进行仿真分析,得到减摆状态下前起落架的时域曲线和频率-速度曲线,如图 19~20所示。
 |
图19 不同载荷下的摆角曲线 |
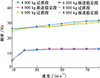 |
图20 不同载荷下的频率-速度曲线 |
由图 19~20可知,在同一滑跑速度下,随着前起落架垂向载荷的增大,前轮摆角过渡段的收敛速度减慢,摆振稳定性下降。相比于前起当量质量为6 000 kg的仿真结果,前起当量质量为4 000 kg时前轮摆角过渡段收敛频率增大2.84%,前起当量质量为8 000 kg时前轮摆角过渡段收敛频率减小5.26%。根据不同载荷下的频率-速度曲线可知,前轮摆角过渡段的摆振频率随着垂向载荷的增加而减小;而渐进稳定段的摆振频率在不同垂向载荷下的变化不大。
4 结论
本文建立了某机型的液压操纵系统模型与前起落架摆振动力学模型并进行了联合仿真,分析减摆状态下油液阻尼对前起落架摆振动态特性的影响。
1) 液压系统的油液阻尼力矩表现出典型的非线性特性。因此,当阻尼力矩与系统的振荡频率和幅度不匹配时,振荡无法得到有效衰减,反而维持了振荡的持续进行,通常表现为小角度等幅振荡现象。针对这一问题,可以通过适当增加库仑摩擦力矩实现有效改善,协助增强系统的稳定性;
2) 液压系统的阻尼孔直径对系统的动态响应具有关键影响。当阻尼孔直径过大(≥4 mm)时,前轮摆角可以迅速收敛,但无法收敛至稳定状态,呈现出小角度等幅振荡现象;而当阻尼孔直径过小(如1 mm)时,前轮摆角的收敛效果变差,收敛时间增加;
3) 在液压阻尼作用下,前轮摆角在初始阶段以高频迅速收敛,收敛至某一小角度后(约0.3°)转为低频渐进收敛。其高阶收敛频率主要由非线性阻尼项主导,低阶收敛频率则由线性阻尼项决定;
4) 初始摆角和轮胎力学特性主要影响系统在过渡段的动态响应,对渐进稳定段响应的影响较小。在摆角动态响应的过渡阶段,收敛频率随初始摆角的增大而增大,与初始摆角为3°相比,在飞机速度为10 m/s时,摆角为1°的过渡段收敛频率减小24.45%,初始摆角为5°的过渡段收敛频率增大6.12%。然而当轮胎垂向载荷增大时,收敛频率则呈现出减小的趋势。与前起当量质量为6 000 kg相比,前轮摆角过渡段的收敛频率在当量质量为4 000 kg时增大2.84%,在当量质量为8 000 kg时减小5.26%。
References
- Feng Fei, Chang Zheng, Nie Hong, et al. Analysis of influence of aircraft flexibility on nose landing gear shimmy[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(12): 2227–2235 (in Chinese) [Google Scholar]
- Gordon J T. Perturbation analysis of nonlinear wheel shimmy[J]. Journal of Aircraft, 2002, 39(2): 305–317 [Article] [Google Scholar]
- Liu Xiaochuan, Liu Chongchong, Mou Rangke. Research progress on shimmy dynamics of aircraft landing gear systems[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(6): 106–121 (in Chinese) [Google Scholar]
- Eret P, Kennedy J, Bennett G J. Effect of noise reducing components on nose landing gear stability for a mid-size aircraft coupled with vortex shedding and freeplay[J]. Journal of Sound and Vibration, 2015, 354: 91–103 [Article] [Google Scholar]
- She C, Zhang M, Hinkkanen M, et al. Damping coefficient characterization and experiment of an electromagnetic damper for shimmy reduction[J]. IEEE/ASME Trans on Mechatronics, 2024, 30(3): 2017–2027 [Google Scholar]
- Gordon Jr J T, Merchant H C. An asymptotic method for predicting amplitudes of nonlinear wheel shimmy[J]. Journal of Aircraft, 1978, 15(3): 155–159 [Article] [Google Scholar]
- Grossman D T. F-15 nose landing gear shimmy, taxi test and correlative analyses[R]. SAE Technical Paper801239, 1980. [Google Scholar]
- Rahmani M, Behdinan K. Parametric study of a novel nose landing gear shimmy damper concept[J]. Journal of Sound and Vibration, 2019, 457: 299–313 [Article] [Google Scholar]
- She C, Zhang M, Ge Y, et al. Design and simulation analysis of an electromagnetic damper for reducing shimmy in electrically actuated nose wheel steering systems[J]. Aerospace, 2022, 9(2): 113 [Article] [Google Scholar]
- Zhu Depei. Shimmy theory and anti-shimmy measures[M]. Beijing: National Defense Industry Press, 1984 (in Chinese) [Google Scholar]
- Gu Hongbin, Ding Yunliang, Yao Zhi, et al. Simulation of aircraft wheel shimmy[J]. Acta Aeronautica et Astronautica Sinica, 2001, 22(4): 362–365 (in Chinese) [Google Scholar]
- Hong Yuqing, Nie Hong, Zhang Ming, et al. Stability analysis of nose gear shimmy with nonlinear characteristics of damper[J]. Advances in Aeronautical Science and Engineering, 2023, 14(6): 109–118 (in Chinese) [Google Scholar]
- Wang Ge, He Leru. Analysis of nose landing gear shimmy of a UAV[J]. Science & Technology Information, 2021, 19(34): 10–14 (in Chinese) [Google Scholar]
- Fong A, Eng P. Shimmy analysis of a landing gear system[C]//ADAMS International User Conference, 1995. [Google Scholar]
- Liu Gang. Simulation of dynamic characteristics of nose-wheel turning and shimmy suppression for large civil aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012. (in Chinese) [Google Scholar]
- Du Jin, Wei Xiaohui, Cai Jiaqi, et al. Effects of oil compressibility on landing gear shimmy[J]. Advances in Aeronautical Science and Engineering, 2015, 6(2): 171–176 (in Chinese) [Google Scholar]
- Zheng Que, Cheng Xiang, Zuo Zheqing, et al. The influence analysis of the elastic modulus on the damping characteristics of hydraulic dampers[J]. Chinese Hydraulics & Pneumatics, 2019(9): 123–126 (in Chinese) [Google Scholar]
- Zhang Dandan, Zhang Ming. Analysis on the shimmy performance for nose wheel steering system[J]. Machine Design and Manufacturing Engineering, 2015, 44(2): 21–26 (in Chinese) [Google Scholar]
- Ruan Shuang, Zhang Ming, Nie Hong. Influence of the structural clearance on the shimmy characteristics of the landing gear during ground taxiing[J]. Journal of Vibration and Shock, 2024, 43(2): 234–243 (in Chinese) [Google Scholar]
- Ding Jianbin. Nose landing gear shimmy modeling and tire characteristic influence on shimmy[D]. Changsha: Central South University, 2023. (in Chinese) [Google Scholar]
- Smiley R F, Horne W B. Mechanical properties of pneumatic tires with special reference to modern aircraft tires[M]. Washington, D.C. : US Government Printing Office, 1960. [Google Scholar]
All Tables
All Figures
|
图1 液压操纵系统原理图 |
| In the text | |
|
图2 节流活门 |
| In the text | |
|
图3 前起落架柔性体仿真模型 |
| In the text | |
|
图4 液压操纵系统仿真模型 |
| In the text | |
|
图5 阻尼力矩和角速度的时域曲线 |
| In the text | |
|
图6 角速度阶段曲线 |
| In the text | |
|
图7 阻尼力矩-角速度曲线 |
| In the text | |
|
图8 不同阻尼孔下的摆角曲线 |
| In the text | |
|
图9 不同库仑摩擦力矩下的摆角曲线 |
| In the text | |
|
图10 不同飞机速度下的摆角曲线 |
| In the text | |
|
图11 不同阻尼模型下的摆角振动曲线 |
| In the text | |
|
图12 不同阻尼模型下的摆角频谱图 |
| In the text | |
|
图13 不同阻尼的频率-速度曲线 |
| In the text | |
|
图14 不同初始摆角的频率-速度曲线 |
| In the text | |
|
图15 飞机速度10 m/s下不同初始摆角的振动曲线 |
| In the text | |
|
图16 飞机速度10 m/s下不同初始摆角的频谱图 |
| In the text | |
|
图17 不同轮胎压力下的摆角曲线 |
| In the text | |
|
图18 不同轮胎压力下的频率-速度曲线 |
| In the text | |
|
图19 不同载荷下的摆角曲线 |
| In the text | |
|
图20 不同载荷下的频率-速度曲线 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.