| Issue |
JNWPU
Volume 37, Number 4, August 2019
|
|
|---|---|---|
| Page(s) | 851 - 856 | |
| DOI | https://doi.org/10.1051/jnwpu/20193740851 | |
| Published online | 23 September 2019 | |
Study on Multi-Priority and Multi-Path QoS Routing Protocol for Airborne Heterogeneous Networks
机载异构网络多优先级多径QoS路由协议研究
1
School of Computer Science, Northwestern Polytechnical University, Xi’an 710072, China
2
Information and Navigation Institute, Air Force Engineering University, Xi'an 710077, China
3
School of Electronics and Information, Northwestern Polytechnical University, Xi’an 710072, China
Received:
13
September
2018
Abstract
In order to guarantee the QoS requirements of multiple services in airborne all-domain heterogeneous and flexible networks, we propose a novel multi-priority and multi-path based QoS routing (MP2R) protocol in this paper. In the protocol, in terms of the route effectiveness and reliability, the route cost penalty function is constructed based on the multi-priority M/M/1 queueingqueuing system with the preemptive-resume policy. The minimum value of the function is derived through the optimization theory, and the optimum routing solution is acquired. The simulation results show that the MP2R protocol not only has the capabilities of differentiation services for different kinds of traffic and QoS provision, but also can utilize the network resource rationally, avoid congestion, achieve the load balancing, and meet the requirements of airborne all-domain heterogeneous and flexible networks effectively.
摘要
为了保障机载全域异构柔性网络中多种优先级业务的不同QoS需求,提出一种多优先级多径QoS路由(multi-priority and multi-path based QoS routing,MP2R)协议。该协议综合考虑路由有效性和可靠性指标,并基于强拆继续型服务策略的多优先级M/M/1系统,构造了路由代价惩罚函数,通过最优化理论对函数求解最小值,从而制定最优路由选择策略。基于机载网络模型路由仿真研究结果表明,MP2R协议不仅具有多业务类型的区分服务和QoS保障能力,而且能够合理利用网络资源,避免网络拥塞,实现负载均衡,有效满足机载全域异构柔性网络的性能需求。
Key words: airborne heterogeneous network / routing protocol / multi-path / multi-priority services / multi-queue / QoS / simulation
关键字 : 机载异构网络 / 路由协议 / 多路径 / 多优先级业务 / 多队列 / Qos / 仿真
© 2019 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
机载网络涉及飞机所有系统,承载混合关键业务,成为飞机的“神经中枢”,是航空电子系统研究、开发的核心问题[1-4]。
目前,国内外飞机上使用的机载数据总线种类繁多,如ARINC-429、ARINC-629、MIL-STD-1553B、MIL-STD-1773、SCI、FC、FDDI、AFDX等。这些系统都采用了“一网到底”的架构设计理念,将任务、控制网络都压缩在一个服务平面上,交换机、网络拓扑设计的复杂度较大,且机载子系统之间的耦合性强,容易导致故障蔓延和大面积爆发,同时网络规划僵硬,系统扩展性差,无法满足日益增多的多业务混合并行传输的需求[5]。
针对现有机载网络的不足,本文提出了一种新型的全域异构、动态自适应接入、柔性包容、混合多层级业务的机载网络——机载全域异构柔性网络。该网络通过可变拓扑、透明化、即插即用的网络动态互联,能够满足机内任务、控制、管理等多种应用的通信要求,支持紧急、事件、周期、视频流、适时等混合业务,实时可靠确定传输,具有简单、高效、透明、灵活、自适应动态接入、故障动态自愈的特点。
为了增强机载网络连通性并提供QoS保障能力,如何设计出满足用户通信需求的高效、可靠的路由算法,使得数据信息能够及时、可靠地传输,一直是机载网络的研究热点和难点。而且机载全域异构柔性网络需要实现飞控、机电、航电、指控体系互联,且承载关键、重要、紧急、一般、适时(尽力而为)的混合业务,对路由协议有着更高的要求。
近年来,多径路由协议在无线传感器网络、移动Ad hoc网络等无线网络中引起了广泛关注。现有无线网络的多径QoS路由协议主要可以分为3类,基于地理信息或速度的路由、基于蚁群或智能蜂群的路由,以及基于网络流量最优化的路由[6]。文献[7]提出的MMSPEED协议是基于地理信息的路由,该协议通过实时性和可靠性来选择路由。其中,可靠性通过控制路由跳数来满足,而实时性通过传输速率来保证。但是该协议的不足之处在于,时延与节点之间的距离成正比的假设在低负载网络条件下可以成立,而在高负载情况下,时延主要受拥塞和信道接入竞争的影响。基于蚁群或蜂群智能的QoS路由协议使用智能、逐次的路径质量学习机制来给可用路径评分,并将路径分值用于分组转发决策[8-10]。但是基于蚁群的算法大多缺少理论分析模型,收敛速度较慢,而且路由发现的开销较大。基于最优化的协议将QoS路由转化为有QoS需求限制的网络流问题。这类协议试图找到各条无线链路上的最优传输速率配置方案,从而使网络效益最大化[11-14]。
本文在上述研究基础上,针对新一代机载全域异构柔性网络,提出一种多优先级多径QoS路由协议。该协议借鉴流量最优化的思想,权衡考虑路由有效性和可靠性指标,通过构造路由代价惩罚函数,对函数求最小值,从而以最小路由开销代价制定最优路由选择策略,为各优先级业务提供QoS保障能力。
1 机载全域异构柔性网络架构设计
机载全域异构柔性网络特征在于控制、任务、管理、维护业务分离,其网络架构采用核心主干网、接入支线网、终端末梢网组成,如图 1所示。
核心主干网采用超高速(40~100 Gb/s)、大容量交换网络,提供高可靠网络服务,支持光波长交换,实现不同业务类型、安全等级、任务关键数据的物理隔离。
接入支线网采用支持不同任务等级、安全等级、业务类型的交换网络,提供高速(100 Mb/s~10 Gb/s)、高可靠网络服务,支持混合多模态多层级网络平面切片,支持控制、任务、管理、维护网络分离,避免将混合业务统一传输、调度、管理,造成不同安全等级、任务等级数据业务故障互相蔓延、难以隔离,影响网络可靠性和效能。
终端末梢网面向不同的业务终端,采用即插即用、动态互联、无中心自组织的无线Mesh网、无线传感网、有线高安全网。终端设备之间信息交互需要不同类型的接入支线网、核心主干网进行数据汇聚,在同一物理区域的终端信息交互可以通过接入支线网转发,不同物理区域的终端信息交互需要通过接入支线网、核心主干网进行数据转发:
① 射频、光电、座舱终端系统(含蒙皮)通过扩展多余度无线接入功能、任意节点直接通信、无逻辑中心点等机制支持机载系统动态互联、即插即用、无中心自组织,将中、高速数据(100 kb/s~10 Gb/s)通过接入支线网进行汇聚处理。无线通信误码率小于10-10,端到端延迟小于5 ms,频点采用60 GHz。
② 机电传感采集终端采用无线传感网,将低速数据(1~250 kb/s)汇聚到远程接口单元,进入接入支线网汇聚处理。
③ 武器、飞控、大气、惯导等终端系统采用强实时高安全有线网,将低速数据通过接入支线网进行汇聚处理。
 |
1 机载全域异构柔性网络架构示意图 |
2 多优先级多径QoS路由协议
2.1 网络模型
在机载全域异构柔性网络中,节点中分组到达后依次进行优先级分类和编码处理,然后按照各自优先级排队,经过信道接入控制协议接入信道后,采用本文提出的MP2R协议选取源节点到目的节点的路由, 分组到达目的节点后,经过译码等环节处理可还原为原分组,如图 2所示。
假设从源节点nsou到目的节点ndes之间能够构建P条非相交路由, 其中路由p∈{1, 2, …, P}包括z个节点, 即p={nsou, …, nk, …, ndes}, 且|p|=z。为了表示方便, 将路由p另记为p={np, 1, np, 2, …, np, z-1, np, z}。
设各优先级分组的长度均服从参数为μ的负指数分布, 令t表示业务类别, t∈{1, 2, …, T}, 其中t=1为最高优先级, t=T为最低优先级。为了保证较高优先级分组的低时延传输, 这里采用强拆继续型服务策略, 即当节点正在服务一个分组时, 若有一个具有较高优先级分组到达, 则立即暂停正在进行的服务, 直接服务新到来的分组。当较高优先级分组服务结束后, 节点对被中断服务的分组从暂停点继续进行服务。
 |
图2 MP2R协议机制 |
2.2 路由代价惩罚函数
路由质量信息主要体现在路由有效性和可靠性上。路由有效性反映信息传输的实时性, 主要体现于分组端到端传输时延, 而路由可靠性主要体现在分组传输的成功率。
定义路由p上优先级t分组传输的端到端时延为dp, t, 其主要由分组在节点缓存中的排队时延、节点对分组的处理时延以及分组在信道上的传播时延三部分组成。
在节点缓存中, 分组按照各优先级、以到达先后次序排队, 形成一个具有T个优先级的多队列M/M/1排队系统。而在不同优先级队列中, 不管分组到达时间的先后次序, 节点优先服务较高优先级的分组。
根据带优先级的M/M/1排队系统[15], 优先级t业务在节点nk内的平均时延, 即平均排队时延与节点对分组的平均处理时延即 之和为
之和为
 1
1
式中,  中优先级t业务的交通强度; λk, t为节点nk中优先级t分组的到达率;
中优先级t业务的交通强度; λk, t为节点nk中优先级t分组的到达率;  为节点nk中优先级t分组的平均剩余时间, 可表示为
为节点nk中优先级t分组的平均剩余时间, 可表示为
 2
2
式中,  为节点对分组服务时间的平均二阶矩, 对于参数为μ的负指数分布, 易知
为节点对分组服务时间的平均二阶矩, 对于参数为μ的负指数分布, 易知
 3
3
因此, 有
 4
4
分组在信道上的传播时延主要与路由p上各相邻节点间的距离有关。路由p上节点nk与下一节点nk+1之间的距离为
 5
5
那么分组在节点nk与节点nk+1之间链路上的传播时延为
 6
6
式中, 对于无线链路c=3×108 m/s。
节点nk与节点nk+1之间链路上优先级t分组的时延为
 7
7
因此路由p上优先级t分组传输的端到端时延dp, t可表示为
 8
8
由于链路可靠性主要取决于信道质量, 与业务优先级无关, 那么将路由p上节点np, k与节点np, k+1之间链路的可靠性记为rk, k+1(1≤k≤z-1), 路由p的可靠性记为rp, 从而有
 9
9
对于路由p, 当传输优先级t业务时, 构造其路由代价惩罚函数(route cost penalty function)如下
 10
10
式中, αt和βt表示优先级t业务中路由有效性和可靠性的权重系数, 满足0≤αt, βt≤1, 且αt+βt=1。这里的权重系数用于构建路由时满足不同业务的QoS需求。Dt和Rt分别为优先级t业务的分组传输端到端时延和可靠性指标。
相应的, 节点nk与节点nk+1之间链路代价惩罚函数可表示为
 11
11
为了使源节点与目的节点之间的总业务流量的路由代价惩罚函数最小, 此最优化问题可表示为
 12
12
2.3 协议设计思想
MP2R协议主要包括路由建立和负载分配2个部分。其中, 路由建立的算法流程如下:
① 将源节点作为当前节点ni;
② 根据各节点位置和节点通信距离, 计算节点ni的下一跳节点的集合Ni;
③ 如果Ni为空, 将ni标记为“dead”, 然后返回前一跳节点; 如果Ni不为空, 对于Ni中的每一个节点, 计算链路代价惩罚函数;
④ 根据(11)式选择链路代价惩罚函数最小, 且未被标记为“dead”的节点nj, 作为下一跳节点, 并将其标记为“used”;
⑤ 将节点nj作为当前节点ni, 重复步骤②~④, 直到目的节点;
⑥ 将以上寻找到的路由记为路由1, 重复步骤①~⑤, 直到源节点和目的节点之间没有其他路由。
负载分配的算法流程如下:
① 针对各优先级业务, 在源节点到目的节点的所有路由中分别选择出满足条件dp, t≤Dt、rp, t≥Rt的路由集合;
② 针对优先级t业务, 按照当前时刻源节点与目的节点之间的各路由代价惩罚函数最小化的原则, 在步骤①确定的路由集合中选择路由。
3 协议仿真
下面利用OMNeT++仿真平台对MP2R协议的性能进行仿真评估。在仿真场景中, 所有节点随机均匀分布。为了简便起见, 在仿真场景中只选择1对源节点和目的节点, 源节点和目的节点分别为场景中最左端和最右端的节点。根据机载异构网络实际应用需求, 设置4种业务类型, 各业务类型的分组到达率之比固定为λ1:λ2:λ3:λ4=1:5:10:20, 其他相关参数如表 1所示。
仿真结果取10次蒙特卡罗实验的平均值, 具体网络仿真参数如表 2所示。
仿真结束后经统计计算,各优先级分组的平均端到端时延和平均传输成功率随分组到达率的变化情况分别如图 3~4所示。
由图 3~4可得,随着业务优先级的提高,分组平均端到端时延降低,平均传输成功率增大;随着分组到达率的增大,优先级1、2业务的性能指标几乎不受影响,而优先级3、4业务的平均端到端时延略有增大,平均传输成功率略有降低,这是因为MP2R协议优先保证较高优先级业务的传输。
为了验证MP2R协议的性能,现将其性能与另外2种典型的多径QoS路由协议TPGF、QoSPMR[11]进行对比,如图 5~6所示。MP2R协议中各业务种类的平均时延和平均传输成功率均优于相同条件下的TPGF协议和QoSPMR协议,这是因为MP2R协议的路由选择机制在保证各业务实现QoS要求的同时,能使整体网络性能达到最优。
各业务类型相关参数设置
仿真参数设置
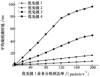 |
3 各业务类型的平均端到端时延 |
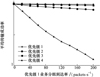 |
图4 各业务类型的平均传输成功率 |
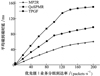 |
5 相同条件下3种协议的平均端到端时延 |
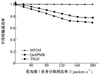 |
图6 相同条件下3种协议的平均传输成功率 |
4 结论
针对未来机载全域异构柔性网络,本文提出了一种新的多优先级多径QoS路由——MP2R协议。该协议综合考虑路由有效性和可靠性指标,通过构造路由代价惩罚函数,并对函数求最小值,以最小路由开销代价制定路由选择策略。仿真结果表明,MP2R协议能够在通信延迟、负载均衡、传输速率的多约束条件下,在端到端之间选择平均传输成功率、平均端到端时延满足业务约束的最优路由。
References
- Xiong Huagang, Zhou Guirong, Li Qiao. A Survey on Avionics Bus and Network Interconnections and Their Progress[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(6): 1135–1144 [Article] (In chinese) [Google Scholar]
- Wang Guoqing, Gu Qingfan, Wang Miao. Research on the Architecture Technology for New Generation Integrated Avionics[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(6): 1473–1486 (In chinese) [Google Scholar]
- Xiao Haotian, Xiong Huagang, Li Qiao et al. The Technique of Fault Injection on Integrated Avionics System through AFDX[J]. Electronics Optics & Control, 2017, 24(10): 75–84 [Article] (In chinese) [Google Scholar]
- Sun Dongxu, Jia Shiwei, Meng Yuci, et al. Built-in-Test Design for Integrated Module Avionics Fibre Channel Networks[J]. Aeronautical Computing Technique, 2016, 46(6): 108–112 [Article] (In chinese) [Google Scholar]
- Zhang Hong Development Trend of the New Generation Integrated Avionics System[J]. Aeronautical Manufacturing Technology, 2016, 52(2): 1–4 [Article] (In chinese) [Google Scholar]
- Uthra R A, Raja S V K. QoS Routing in Wireless Sensor Networks-A Survey[J]. ACM Computing Surveys, 2012, 45(1): 108–112 [Article] [CrossRef] [Google Scholar]
- Felemban E, Lee C G, Ekici E. MMSPEED:Multipath Multi-Speed Protocol for Qos Guarantee of Reliability and Timeliness in Wireless Sensor Networks[J]. IEEE Trans on Mobile Computing, 2006, 5(6): 738–754 [Article] [CrossRef] [Google Scholar]
- Kim S. An Ant-Based Multipath Routing Algorithm for QoS Aware Mobile Ad-Hoc Networks[J]. Wireless Personal Communications, 2012, 66(4): 739–749 [Article] [CrossRef] [Google Scholar]
- Krishna P, Saritha V, Vedha G, et al.Quality-of-Service-Enabled Ant Colony-Based Multipath Routing for Mobile AD Hoc Networks[J]. IET Communications, 2012, 6(1): 76–83 [Article] [CrossRef] [Google Scholar]
- Moghdam M N, Taheri H, Karrari M. Multi-Class Multipath Routing Protocol for Low Power Wireless Networks with Heuristic Optimal Load Distribution[J]. Wireless Personal Communications, 2015, 82(2): 861–881 [Article] [CrossRef] [Google Scholar]
- Wang X M, Li C B, Lu J L, et al. QoSPMR: QoS-Aware and Priority-Based Multipath Routing Algorithm for WMSNs[C]//2012 Spring Congress on Engineering and Technology, 2012: 1–5 [Article] [Google Scholar]
- Bagula A B. Modelling and Implementation of QoS in Wireless Sensor Networks:a Multiconstrained Traffic Engineering Model[J]. EURASIP Journal on Wireless Communications and Networking, 2010(1): 1–14 [Article] [Google Scholar]
- Miguel Sepulcre, Javier Gozalvez, Baldomero. Multipath QoS-Driven Routing Protocol for Industrial Wireless Networks[J]. Journal of Network and Computer Applications, 2016, 74: 121–132 [Article] [CrossRef] [Google Scholar]
- Oleksandr V L, Oleksandra S Y. Dynamics Analysis of Multipath QoS-Routing Tensor Model with Support of Different Flows Classes[C]//IEEE International Conference on Smart Systems and Technologies, 2016: 225–230 [Google Scholar]
- Lbe C Oliver. Ibe. Fundamentals of Stachastic Networks[M]. John Wiley & Sons, Inc. 2011: 93–99 [Google Scholar]
All Tables
All Figures
|
1 机载全域异构柔性网络架构示意图 |
| In the text | |
|
图2 MP2R协议机制 |
| In the text | |
|
3 各业务类型的平均端到端时延 |
| In the text | |
|
图4 各业务类型的平均传输成功率 |
| In the text | |
|
5 相同条件下3种协议的平均端到端时延 |
| In the text | |
|
图6 相同条件下3种协议的平均传输成功率 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.