| Issue |
JNWPU
Volume 43, Number 1, February 2025
|
|
|---|---|---|
| Page(s) | 99 - 108 | |
| DOI | https://doi.org/10.1051/jnwpu/20254310099 | |
| Published online | 18 April 2025 | |
Research on in-orbit self-organizing network strategy for cellularized spacecraft based on improved AODV protocol
基于改进AODV协议的胞元航天器在轨自组网策略研究
1
Innovation Academy for Microsatellites of CAS, Shanghai 201203, China
2
University of Chinese Academy of Sciences, Beijing 100049, China
3
Shanghai Engineering Center for Microsatellites, Shanghai 201203, China
Received:
30
November
2023
Abstract
The cellularized spacecraft is composed of cellularized monomers, capable of in-orbit assemble, reconstructed and maintenance, and is one of the important direction for developing the large-scale spacecrafts in the future. The communication network self-organization between cellularized monomers is the guarantee for the smooth construction of the system in orbit, but there is still a lack of research on this. Based on system characteristics, the cellularized monomers of the cellularized spacecraft are divided into three levels: main brain cell, functional cell, and payload bearing cell, according to their functional characteristics. The in orbit construction process is described, and the integrity of the cellularized spacecraft self-organization network is defined. A self-organization network strategy based on the traditional AODV routing protocol is also designed, which considers the connectivity performance of nodes in the routing path, path distance, path energy, and congestion status. This strategy selects the optimal path, and prioritizes routes that contain high-energy functional cells for cellularized spacecraft, and the path information is updated by the intermediate cells when returned. Simulation experiments show that this strategy can effectively reduce the system power consumption and average delay of cellularized spacecraft in the orbit construction scenario, improve the network survival time, increase throughput, reduce packet loss rate and optimize the network topology. The scaled experiments of the ground cellularized spacecraft prototype show that the present strategy has good applicability in similar scenarios and different situations.
摘要
胞元航天器由胞元单体构成, 能够在轨组装、重构与维护, 是未来大尺度航天器发展的重要方向之一。胞元单体间的通信自组网是在轨构建顺利进行的保障, 但目前对此研究尚有不足。结合系统特征, 将胞元单体按照功能特性划分为主脑胞元、功能胞元、载荷承载胞元3个级别, 描述在轨构建过程, 定义胞元航天器自组网的完整性, 并在传统AODV路由协议基础上, 定义并综合考虑路由路径中节点的连接性能、路径距离、路径能量和拥堵状况, 设计自组网策略, 优先选择包含高能量功能胞元的路由路径, 并于路径信息返回时由中间胞元进行更新。仿真实验表明, 文中策略能有效降低胞元航天器在轨构建场景下自组网的系统功耗与平均时延、提高网络生存时间、增大吞吐量、降低丢包率并优化网络拓扑; 地面胞元航天器样机缩比实验则表明该策略在同类场景不同情况下具有良好的适用性。
Key words: cellularized spacecraft / Ad hoc network / AODV protocol / routing path
关键字 : 胞元航天器 / 自组网 / AODV协议 / 路由路径
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
随着人类对太空探索的不断追求, 更大尺度的航天器发展成为科学家们不断追求的目标之一。然而受限于运载包络约束, 单体航天器尺度即使通过折展方式也无法无限提高。
在航天器交互对接与微纳技术发展的推动下, 将大尺寸航天器分解为若干具有连接能力的胞元卫星, 发射时充分利用运载包络空间高效堆叠, 入轨后胞元星群能够根据任务目标在轨固连组装构建, 逐步成为大尺度航天器构建的一种新技术途径。
胞元卫星目前尚未形成统一的定义和标准, 早期Tanaka等[1]将航天器上的各个分系统重新划分成若干标准的模块化单元, 除了具有在轨组装能力以外, 还能衍生在轨重构与维修能力。这与传统卫星编队、卫星集群、卫星星座不同, 此类系统的单体在空间中有相对固定的位置关系且保持离散状态。而胞元航天器的单体则是从最初的离散状态逐步构成一个完整的有机整体。该思想也被延用于未来一些大型航天器的设计, 如韦伯天文望远镜的下一代ATLAST[2]就采用了类似模块化的思想, 具备可维修能力。
美国国防高级研究计划局(DARPA)从2011年起开展胞元卫星技术研究, 并于2016年完成了“凤凰”计划[3–4]的在轨试验; 德国宇航局(DLR)于2022年在国际空间站中验证了iBOSS[5–6]胞元卫星能够利用电机与标准接口,形成卫星六面灵活对接与组装的能力。
我国哈尔滨工业大学的游斌弟等[7]从空间机器人的角度进行了可攀爬的航天器细胞化设计, 具有一定的创新思想。西北工业大学的张夷斋等对胞元卫星的在轨自重构展开了深入研究, 推导了在轨重构的动力学模型并提出了其惯性特征识别的回归方程, 提高了胞元卫星间的可连接性, 基于位姿信息与相对惯性特征设计了一种分布式的姿态控制方法[8]并最终提出一种胞元卫星在轨构建航天器后的自组织重构算法[9], 实现不同构型之间的快速转换, 并实现了仿真可视化, 拓展了胞元卫星的在轨工程应用途径。
无论是空间细胞机器人、胞元卫星还是本文的胞元航天器, 均由数量众多的单体构成系统, 在轨工作时, 需要保持每个单体间的感知与通信。传统航天器如单颗卫星、深空探测器等, 对航天器间组网通信需求较少; 而卫星编队、卫星星座等系统则要求航天器间构建稳定的通信网络, 如SpaceX公司的Starlink星座[10]已初步在轨构建了星间互联网络。此类系统航天器之间保持着相对确定或可实时解算的位置关系, 通过激光、微波等方式实现远距离(500 km以上)的点对点通信[11], 研究方向主要集中于固定网络拓扑下的性能提升[12–16], 对网络的自组织能力要求不高, 对近距离规模星座、规模星群互相感知组网的研究也较少。
无线自组网按需式平面距离向量路由协议AODV(Ad hoc on-demand distance vector routing)[17]是一种基于距离向量的自适应无线自组网路由协议, 在无线自组网应用中有较好的适用性与稳定性。针对性优化后, 常用于节点动态性大、连接需求高、链路不确定的网络, 这与胞元航天器自组网特征相似, 也类似于地面无线传感器、无人机集群等系统的自组织网络[18–23], 然而, 对于胞元航天器在轨构建时额外的节点差异大、能量消耗要求高的场景, 仍无法完全适配。因此, 本文从胞元航天器构建过程所面临的胞元间如何自感知、自组网问题出发, 根据航天器在轨运行特点, 将胞元航天器系统的胞元单体进行分级, 改进传统AODV路由协议, 提出了适应在轨环境的自组网策略, 并进行系统仿真与胞元航天器的地面缩比实验, 验证了该方法在胞元航天器自组网体系中对网络随机连接能力、生存能力改善的有效性, 为未来大型胞元航天器的在轨构建和运行奠定技术基础。
1 航天器胞元化设计与自组网建模
1.1 航天器胞元化设计与构建流程
为实现大型航天器的在轨构建, 采用胞元航天器思想, 将航天器的功能模块拆分至胞元单体, 整体发射入轨后进行在轨感知、组网、构建与维护升级。依照不同的航天器在轨构建任务需求, 胞元单体内可配置星务计算机、电源、反作用轮、光纤陀螺、磁强计、磁力矩器等功能器件, 形成不同功能的胞元。胞元外部可通过接口连接功能配件如太阳能帆板、热控贴片、天线贴片、电池贴片等, 以丰富扩展功能。
不同的胞元单体功能对航天器的重要程度不尽相同, 依照功能特性与对航天器的重要程度, 将胞元单体划分为3个级别:
最高级为主脑胞元, 集成系统的最高算力与测控、综合控制等资源, 是系统控制与调度的核心, 接收并处理系统内所有其余胞元的各类数据, 并对所有胞元进行控制与调度, 如星务计算机等; 次级为功能胞元, 各自集成系统各个分功能,如姿控、轨控、能源、推进等, 由于功能的复杂性与重要性, 分配仅次于主脑胞元的算力与能量资源; 最低级为载荷承载胞元, 是整个系统各类载荷的结构支撑, 仅分配有限的算力与能量以支持自身姿态、检测健康状态,以及参与系统信息传递, 数量上占据整个系统的大多数。胞元卫星分级与部分配件展示如图 1所示。
 |
图1 胞元单体分级与功能配件 |
大型胞元航天器的在轨构建需要数量庞大的胞元单体, 应设定一个具体流程, 以实现在轨的顺利构建。在轨构建流程描述如下:
用于构建航天器的胞元单体发射入轨后, 将逐步分散于一定范围内的空间中, 并开始建立与周围胞元单体的连接, 最终通过信息的传递与主脑胞元建立通信连接。在主脑胞元与一定数量的胞元单体建立通信后, 即按照预先设定的航天器构型, 统筹指挥全体胞元进行在轨构建, 部分胞元单体能够自主移动, 部分则需要空间机器人的协助进行构建。当所有胞元按照预定构型接入主体并功能正常后, 在轨构建完成。
为实现更遥远天体的探测, 设计了一种十字形的大型空间阵列望远镜, 如图 2所示。该胞元航天器将按照上文所述流程完成在轨构建, 也为本文的自组网实验提供场景基础。
 |
图2 十字形大型空间阵列望远镜 |
1.2 系统自组网建模
在胞元航天器入轨开始构建后, 所有参与构建的胞元需全部能够与主脑胞元进行无线通信, 以实现主脑胞元对整个构建过程的控制。由于通信能力有限, 面向大尺度胞元航天器, 胞元一般无法与非相邻胞元直接通信。因此, 在构建过程中, 胞元间需形成一个自组织网络, 通过中继实现非相邻胞元间的通信。由此定义, 对任意的2个单体x, y, 均存在路径函数P, 使得
 (1)
(1)
式中, P为x至y的通信路径。则可定义, 该系统中任意2个胞元间的路径P的集合即为该系统的自组网 N。
假设系统中只包含一个主脑胞元, 记作A; 另有若干个功能胞元, 集合为 B; 若干个载荷承载胞元, 集合为 C。则有如下定义:
在胞元航天器系统M中, 对任意胞元x∈ B ∨ C, 在M构建完成前, 始终存在路径P, 使得
 (2)
(2)
则认为该胞元航天器系统M能够完成在轨构建, 将所有胞元与主脑胞元通信的路径集合定义为基本自组网N*。因此, 对于胞元航天器的自组网, 首先应保证基本自组网N*的完整, 再考虑性能的提升, 这对每个胞元单体的生存时间提出了要求, 即应当尽可能地延长每个胞元单体的存活时间, 直至其接入航天器主体完成构建。
对于每一条路径P, 传输1次信息I时, 将固定产生E(I)的能量消耗, 与信息的大小和胞元处理信息的功耗有关; 在没有信息拥堵情况下, 路径将存在D(I)的固定延迟, 与信息大小与胞元信息处理能力有关。假设某时刻下有n条信息传输路径, 定义系统在通信时的总能量消耗、系统的平均延时分别为
 (3)
(3)
 (4)
(4)
式中:Ii为路径Pi中传递的信息; μi为路径Pi的拥堵系数, 与网络负载、胞元性能有关, 可由(5)式计算。
 (5)
(5)
式中:m为路径Pi中胞元的数量;Dj, EL为路径中第j个胞元在当下的系统延时, 每个胞元的系统延时依据当时网络实际情况确定。
2 基于改进AODV协议的自组网策略
2.1 AODV协议
AODV协议依靠中继节点建立路由, 将距离向量作为路由的衡量标准, 按照最小跳数寻找并建立路由路径, 因此AODV协议只追求初始节点至目标节点路由路径上的跳数最少, 即中间节点最少, 而不考虑路径中影响数据传输的节点性能、路径延迟等其他因素[24], 因而可能导致选择到链路质量差、节点延迟高、能量低的路由, 导致该条路由不稳定, 影响整体的网络质量, 减少网络生存时间。
2.2 AODV协议的改进
2.2.1 可连接性能
在无线网络中, 每个节点都有其可通信范围, 为保证通信质量, 限定节点的最大通信距离为dmax, 在以该节点为中心半径为dmax的球形空间内的其他无阻挡节点可与其建立连接, 定义这些节点为相邻节点, 相邻节点越多, 表明该节点在建立路由时有更多的选择, 找到目标节点的概率越高。因此, 定义NER为节点的相邻节点数量, 其值越大, 表征该节点可连接性能越好。则定义路径p的节点平均相邻节点数为
 (6)
(6)
式中:n为路径p中节点数量。在相同情况下, 路径选择时应优先考虑Ap, VN较大的路径, 以减少链路断裂的情况。
2.2.2 路由路径距离
传统AODV协议追求路由中的最小跳数, 而忽略每一跳之间的通信质量。为避免路由中某一跳的距离过远, 进而导致通信链路不稳定, 在节点选择时考虑距离因素。定义Ap, VD为路由路径p中平均每跳距离, 则有
 (7)
(7)
式中:m为路径p中总跳数;di为第i跳两节点间的距离。在相同情况下, 路由路径选择时应优先考虑Ap, VD较小的路径, 以保证该路由链路更稳定。
2.2.3 路由路径能量
在自组网生命周期内, 节点能量是有限的, 当节点的能量越少时, 包含该节点的路由路径就越不稳定, 可能会因节点能量耗尽导致链路断裂。因此需考虑每一跳节点的能量情况。定义ENE为路由路径中间节点的剩余能量, 由节点自行监视并记录, 则路径p的平均剩余能量Ap, VE为
 (8)
(8)
式中:n为路径p中节点数量, 在相同情况下, 路径选择时应优先考虑Ap, VE较大的路径, 以减少链路断裂的情况。
2.2.4 拥堵节点
在自组网中, 不可避免有一部分节点因位置特殊, 成为多条路由路径上共用的中间节点, 当信息密集传递时, 该节点必然产生信息拥堵, 造成信息传输延迟。因此在路由选择时应尽可能避免选择包含此类节点的路径。定义CON为中间节点的连接路由数量, 则路径p中节点平均路由连接数Ap, VC为
 (9)
(9)
式中,n为路径p中节点数量, 在相同情况下, 路径选择时应优先考虑Ap, VC较小的路径, 以减少路径的拥堵概率。
2.2.5 最优路径选择方法
传统AODV协议中, 目的节点会收到来自多条路径的路由请求(route request, RREQ)消息, 但只对首条进行回复, 保证了跳数最少但路径不一定最优。为使得路径最优, 对上文提出的节点可连接性、路由路径距离、路由路径能量、拥堵情况这些影响链路质量的因素进行综合判断, 定义路径质量评价参数如(10)式所示。
 (10)
(10)
式中,α, β, γ, λ为权重系数, α+β+γ+λ=1。权重系数的值依据实际应用场景特征确定。
令目的节点接收各个路径的RREQ消息, 并处理消息中中间节点留下的节点信息, 在限定的时间阈值内, 对最先到达的若干条路径进行路径质量评价参数计算, 选取路径质量评价参数值最大的路径作为最优路径回复路由应答(route reply, RREP)消息。对于路径的中间节点, 令中间节点记录收到的所有路径, 在转发RREQ消息后再对这些路径计算路径质量评价参数并选择局部最优路径, 直至收到目的节点的RREP消息, 用计算得到的局部最优路径更新RREP消息中的路径。如此, 在路径上的每个节点都参与了最优路径的选择, 避免了在路径中出现极端情况时平均值判断失效; 在返回时再对路径更新, 则减少了计算消耗, 降低了判断延迟, 能有效提高网络性能。
2.3 胞元航天器自组网策略设计
在胞元航天器自组网场景中, 节点由胞元单体代替, 且胞元有明确的分级, 不同级别的信息处理能力与能量分配也有较大差距。因此, 在此场景应用改进AODV协议时, 需做出针对性的策略设计, 结合上文提出的AODV协议改进方法, 胞元航天器自组网建立流程如下:
1) 源胞元检查自身是否有目的胞元的路由, 有则直接通过已有路由与目标胞元建立通信, 无则广播REEQ消息。
2) 中间胞元收到RREQ消息, 在RREQ消息中加入自身信息并转发; 若重复接收RREQ消息, 则依据(10)式计算它之前的路由路径质量评价参数, 选取最优。当中间胞元为系统功能胞元时, 将额外在RREQ信息中加入标志位。
3) 目的胞元收到RREQ消息, 记录在时间阈值内到达的所有消息并依据(10)式计算路径质量评价参数, 选取最优路径并返回RREP消息。若路径中包含功能胞元, 则忽略路径评价参数, 优先选择包含功能胞元的路径, 直至功能胞元的能量消耗至与载荷承载胞元初始能量一致。若有多条路径包含功能胞元, 则对这些路径进行最优评价选择。
4) 返回路径中, 中间胞元收到RREP消息后, 依据在步骤2)中选择的更优路径对当前路径进行更新并转发RREP至源胞元。
5) 源胞元接收到RREP消息, 完成最优路由的建立。
6) 其余胞元在通信时也遵循此流程, 最终建立1个由最优路由构成的自组网络。
策略流程图如图 3所示:
 |
图3 胞元航天器自组网策略流程图 |
由于在胞元航天器系统中, 功能胞元数量少但性能好、能量多, 载荷承载胞元数量多但性能与能量较低, 因而在路由路径的选择中, 优先选择有功能胞元的路径, 使得功能胞元在网络运行初期承担更多的路由任务, 尽可能发挥其性能, 也能够平衡其与载荷承载胞元间的功耗差距, 实现网络整体消耗更平均, 生存性能得到提升。
3 实验与分析
3.1 仿真实验参数设置
选择图 2所示的空间阵列望远镜搭建过程为本文的仿真场景。设置仿真区域为20 m×20 m×10 m的立体空间, 主脑胞元位于空间的中心, 其4个方向上各有一功能胞元, 对应十字形阵列望远镜的构型。载荷承载胞元主要分布在4条臂的周围, 以支持四臂的向外拓展构建, 最终将功能胞元搬运至预定位置。设置4条臂的构建进程各不相同, 实现对构建流程的全覆盖, 也提高了仿真实验的效率。表 1为仿真中主要的参数设置, 仿真工具为MATLAB, 依据本场景的特征与多次测试仿真, (10)式中的权重系数α, β, γ, λ分别设为0.3, 0.2, 0.3, 0.2。
主要仿真参数
单体每次传输k比特数据至距离为d的其他单体的能量消耗为
 (11)
(11)
式中,  。
。
单体每次收到k比特数据时消耗的能量为
 (12)
(12)
单体每次传输k比特数据至距离为d的其他单体的路径延迟为
 (13)
(13)
式中, TDWA为接收信号的胞元在接收前处理其他路径信息而产生的延迟, 随网络仿真进程的推进不断变化。
对胞元航天器自组网场景分别应用本文提出的策略、传统AODV协议与常用于传感器无线自组网的低能耗自适应聚簇层级算法[25](low energy adaptive clustering hierarchy, LEACH)进行50次仿真, 每次仿真中, 随机改变各个胞元单体的位置与等级, 模拟在轨构建中各种场景。各项网络质量评价指标取50次仿真实验结果的平均值。
3.2 仿真结果与分析
3.2.1 系统能量消耗与生存情况
图 4为3种不同自组网方法应用于胞元航天器中的剩余能量状况。
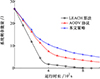 |
图4 不同自组网方法系统剩余能量对比 |
可以看到, 应用本文策略的自组网系统整体功耗明显较低, 系统剩余能量在LEACH算法耗尽时仍有富余, 相较于传统的AODV协议, 也有较多的剩余。这主要依托于本文的策略考虑了路由路径距离与胞元能量因素, 每一跳的距离减少将有效减少信息传输的能量消耗, 进而降低了系统的整体功耗; 而对胞元能量的考虑, 使得一些自身能量低的胞元被选择加入路径的概率减少, 只在必要时刻加入通信, 促使选择其他整体能量更高的路径, 一定程度上优化了系统整体的能量消耗分配。
本文策略是由AODV协议改进而来, 因此在仿真初期, 能量消耗表现与AODV协议比较接近, 仅略优于AODV协议。随着仿真的推进, 各方法的胞元间最优拓扑逐渐确定, 能量消耗速率逐渐放缓, 体现在图 4中曲线斜率的变化, 本文策略斜率放缓的拐点也明显早于其余2种方法, 证明本文策略也能够最早确定出最优自组网的拓扑。
系统能量消耗的优化在胞元生存时间上也有体现。如表 2所示, 对采用不同时间仿真后没有耗尽自身能量的单体数量进行统计: 在300 s时, 3种自组网方法的胞元存活率均较高, 但相较于AODV, 应用LEACH算法的自组网胞元已出现部分能量耗尽, 且随着运行时间的推进, 存活率快速下降, 在600 s时已跌至10%以下, 可以认为该自组网已完全失效。而基于改进AODV的本文策略相较于AODV, 生存率有明显提升, 在600 s时提升了约28.5%, 在900 s时提升了约10.2%。证明本文提出的自组网策略有效提升了胞元航天器在轨构建场景自组网的生存性能。
不同自组网方法胞元生存情况统计表
3.2.2 系统时延分析
图 5则展示了不同自组网方法在不同负载下的系统平均时延。低负载为表 1中设置数据包发送频率, 高负载时数据发送频率为其2倍。可以看到, 本文提出自组网策略在高、低负载下时延均低于传统AODV协议与LEACH算法。在负载增大时, 本文策略的时延平均增长约64.3%, 相较于传统AODV协议的74.9%与LEACH算法的85.6%, 增大幅度明显较小。在时延的稳定性上, 本文策略考虑胞元的可连接性与拥堵状况, 使得在路由路径选择时, 能够选到邻居胞元多且当前负载较小的中间胞元, 避免多条数据堵塞于1个中间胞元的状况, 优化整体的网络拓扑, 与其他方法相比, 时延波动也较小。
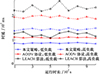 |
图5 不同自组网方法系统时延对比 |
3.2.3 系统数据传输能力分析
为测试应用不同组网方法时不同数据传输量下的数据传输能力, 分别设置数据包发送间隔为0.125, 0.25, 0.5, 1, 2 s进行仿真实验, 得到网络的数据传输能力指征吞吐量、丢包率与数据包发送间隔的关系,如图 6~7所示。
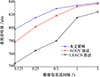 |
图6 不同自组网协议系统吞吐量对比 |
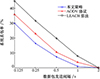 |
图7 不同自组网协议系统丢包率对比 |
可以看到, 随着数据包发送间隔的缩短, 即胞元单位时间内传输的数据量增大, 应用3种方法时系统的吞吐量均在降低, 丢包率也都在增大。这是因为较快的数据发送将导致胞元对数据的处理能力跟不上, 进而导致了拥塞。
数据量的增大对应用LEACH算法的系统吞吐量与丢包率影响最大, 这是因为LEACH算法在成簇以后, 簇中节点的数据需全部由簇首进行转发, 数据将大量拥塞在簇首处, 进而导致数据传输能力大幅下降, 甚至引起网络崩溃。而应用本文策略的系统, 随着数据包发送间隔的缩短,虽吞吐量也在降低, 丢包率也在增大, 但相比应用传统AODV协议的系统, 降低与增大的幅度均不大, 即系统的数据传输能力得到明显优化。本文提出的策略中充分考虑路由路径的拥塞状况, 当一个胞元因有太多数据而拥堵时, 其余胞元对路径的选择将绕开它而选择其他较为空闲的胞元, 优化了整体数据传输性能。
3.2.4 系统拓扑分析
网络的拓扑情况也能直观地展示本文的自组网策略取得的效果。
图 8~9分别为使用本文自组网策略与使用LEACH算法的某时刻网络拓扑图。可以看到, 使用本文策略的自组网拓扑相对简约清晰, 在边缘游离的单体能够准确选择相对较优的路由路径, 即包含在该时刻仍有较多能量剩余的功能胞元, 以便整体降低功耗和时延。而LEACH算法通过随机簇头选举平衡各单体负载, 因此在簇头的选举上视所有胞元一致, 且载荷承载胞元只能通过簇头与其他单体进行通信, 这会导致部分载荷承载胞元的快速失效。因此, 应用LEACH算法的自组网拓扑则相对随机且杂乱。
 |
图8 应用本文策略的自组网拓扑 |
 |
图9 应用LEACH算法的自组网拓扑 |
而为了验证本文策略在不同场景中的适用性, 对不同构型的航天器进行同样条件的自组网仿真, 仿真结果均显示应用本文策略的网络拓扑仍较LEACH算法简洁清晰, 证明本文策略对不同的场景有较好的适用性。
结合上述对系统整体功耗、时延、生存时间、数据传输能力与自组网拓扑的仿真结果分析, 在无线传感器网络中应用广泛的分簇LEACH算法并不适合胞元航天器的自组网, 这与系统的固有特征有关。AODV协议由于对路径的自主搜寻与最小跳数基本原则, 能够有效应对胞元航天器在轨构建场景单体动态变化的场景。本文在AODV协议的基础上,考虑通信距离限制、胞元能量限制以及节点拥堵状况等对多路由路径的影响,设计了改进型AODV协议,能够很好适应十字形大型空间阵列望远镜在轨构建应用场景并获得良好的自组网质量。
3.3 胞元航天器缩比实验与分析
为进一步验证本文自组网策略在胞元航天器构建场景中的有效性, 使用胞元航天器样机在地面搭建缩比实验场景,如图 10所示。实验场景中构型呈十字状与本文仿真构型相似, 中心为主脑胞元D, 一方向上有额外的载荷承载胞元S向主体构型靠近, 并尝试与主脑胞元建立通信, 同时通过无线串口与笔记本电脑通信, 传回路由信息。
 |
图10 胞元航天器缩比实验示意图 |
易知胞元S至胞元D的路由路径主要有S→A→B→D、S→B→D与S→G→F→D 3条。对于传统AODV协议, 将始终选择S→B→D的路径; 而对于本文提出的策略, 当单体A, B, G全部为载荷承载胞元时, 同样会选择S→B→D路径, 而当定义胞元G为功能胞元时, 依照本文策略则会优先选择S→G→F→D的路径。因此, 通过软件定义地面缩比实验中胞元样机的分级、能量等参数, 改变胞元样机的实际位置, 即可排列组合出不同的胞元卫星状态与实验场景进行实验。
将胞元样机摆放至不同位置, 并对每个胞元样机的分级进行不同组合的定义, 以尽可能多地模拟在轨构建场景中的不同阶段与情况。定义路径一致性的计算方式为:(2条路径中相同的节点数-首尾节点数)/(最长路径的节点数-首尾节点数)。实际实验共设置50种不同的场景, 得到实际返回路径与理论计算最优路径的一致性结果统计如表 3所示, 对其进行平均可得平均路径一致性为83.7%。结果表明本文策略在胞元航天器缩比实验中体现了相同类型场景下较好的适用性, 而没有达到更高的路径一致性的原因可能是由于缩比实验的规模与真实场景不一致, 尤其在距离与拥堵因素上差距过大, 导致在一些情况下与理论计算选择的路径产生偏差。
路径一致性统计
4 结论
本文从当前胞元航天器系统的设计方法出发, 对在轨构建场景网络自组织方法展开研究, 提出一种基于改进AODV协议的胞元化航天器在轨自组网策略。通过对AODV协议中寻找路由路径时的节点连接性能、路径距离、路径能量与拥堵状况进行综合考虑, 结合实际应用场景赋予权值计算路径评价参数, 以选择最优路由路径。针对胞元航天器在轨构建场景制定策略, 在选择路径时优先考虑能量较多的功能单体, 并于路径返回时进一步更新最优路径, 实现路由路径分级优化, 以较小的消耗与延迟达到最优效果。通过仿真实验验证了本文策略能够有效降低胞元航天器在轨构建场景自组网的系统整体功耗与平均时延, 提高了网络中胞元的存活率, 增大了网络吞吐量, 降低了丢包率, 优化了整体网络拓扑; 通过地面胞元航天器样机缩比实验, 验证本文策略具有良好的同类场景适应性。后续将进行更大更复杂的场景仿真与规模更大的缩比实物实验, 进一步优化本文策略, 以实现对胞元航天器在轨构建场景自组网的进一步性能提升。
References
- TANAKA H, YAMAMOTO N, YAIRI T, et al. Reconfigurable cellular satellites maintained by space robots[J]. Journal of Robotics and Mechatronics, 2006, 18(3): 356–364. [Article] [Google Scholar]
- BOLCAR M R, BALASUBRAMANIAN K, CLAMPIN M, et al. Technology development for the advanced technology large aperture space telescope (ATLAST) as a candidate large UV-optical-infrared (LUVOIR) surveyor[R]. GSFC-E-DAA-TN25357, 2015 [Google Scholar]
- JAEGER T, MIRCZAK W, CRANDALL B. Cellularized satellites-a small satellite instantiation that provides mission and space access adaptability talbot jaeger[C]//Proceedings of the AIAA/USU Conference on Small Satellites, 2016 [Google Scholar]
- JAEGER T, MIRCZAK W. Phoenix and the new satellite paradigm created by hiSat[C]//Annual AIAA/USU Conference on Small Satellites, 2018 [Google Scholar]
- KORTMANN M, WEISE J. Building block-based "iBOSS" approach[C]//66rd International Astronautical Congress, 2018 [Google Scholar]
- JANSEN F, BRANDT T. INPPS flagship with iBOSS building blocks[C]//70th International Astronautical Congress, 2019 [Google Scholar]
- YOU Bindi, WEN Xiaolei, LIU Yuqiang, et al. Gait analysis of cellular space robot for on-orbit climbing truss[J]. Journal of Astronautics, 2020, 41(5): 521–530 (in Chinese) [Google Scholar]
- CHANG H, HUNG P, ZHANG Y Z, et al. Distributed control allocation for spacecraft attitude takeover control via cellular space robot[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(11): 2499–2506 [Google Scholar]
- ZHANG Y, WANG W, SUN J, et al. A self-reconfiguration planning strategy for cellular satellites[J]. IEEE Access, 2019, 7: 4516–4528. [Article] [Google Scholar]
- CHAUDHRY A U, YANIKOMEROGLU H. Laser intersatellite links in a starlink constellation: a classification and analysis[J]. IEEE Vehicular Technology Magazine, 2021, 16(2): 48–56. [Article] [Google Scholar]
- GUO Chongbin, XIA Xiwang, SI Chaoming, et al. A survey of relative position and attitude measurement for formation flying satellite[J]. Aerospace Control, 2018, 36(6): 83–89 (in Chinese) [Google Scholar]
- RUIZ-DE-AZUA J A, CALVERAS A, CAMPS A. A novel dissemination protocol to deploy opportunistic services in federated satellite systems[J]. IEEE Access, 2020, 8: 142348–142365 [Google Scholar]
- GUO Xiaoxu, XU Zhaobin, XU Kedi, et al. Optimization of multiple access mode for large-scale constellation networking communication[J]. Journal of Northwestern Polytechnical University, 2023, 41(4): 644–653. [Article] (in Chinese) [Google Scholar]
- SCHUBERT T, WOLF L, KULAU U. Ns-3-leo: evaluation tool for satellite swarm communication protocols[J]. IEEE Access, 2022, 10: 11527–11537. [Article] [Google Scholar]
- MAO Yiding, TIAN Zhou, ZHAO Yu, et al. A DTN packet routing strategy for satellite Networks[J]. Journal of Northwestern Polytechnical University, 2020, 38(suppl.1): 113–119 (in Chinese) [Google Scholar]
- LIU Sili. Research on key technologies of satellite formation intersatellite ad hoc networks[D]. Changsha: National University of Defense Science and Technology, 2019 (in Chinese) [Google Scholar]
- ZHANG Qiyuan. Design and implementation of low-power routing protocol for wireless sensor network supporting network convergence[D]. Taiyuan: North University of China, 2021 (in Chinese) [Google Scholar]
- MALHOTRA A, KAUR S. A comprehensive review on recent advancements in routing protocols for flying ad hoc networks[J]. Transactions on Emerging Telecommunications Technologies, 2022, 33(3): 56–61. [Article] [Google Scholar]
- ZHONG Dong, WANG Yining, ZHU Yian, et al. A network topology control mechanism based on air vehicle movement characteristics[J]. Journal of Northwestern Polytechnical University, 2015, 33(6): 1007–1013. [Article] (in Chinese) [Google Scholar]
- MAHMUD I, CHO Y. Adaptive hello interval in fanet routing protocols for green UAVs[J]. IEEE Access, 2019, 7: 63004–63015. [Article] [Google Scholar]
- GUO Jin, ZHANG Shengbing, ZHENG Bo, et al. Study on multi-priority and multi-path qos routing protocol for airborne heterogeneous networks[J]. Journal of Northwestern Polytechnical University, 2019, 37(4): 851–856. [Article] (in Chinese) [Google Scholar]
- ALBU-SLAIH A T, KHUDHAIR H A. ASR-FANET: an adaptive SDN-based routing framework for FANET[J]. International Journal of Electrical and Computer Engineering, 2021, 11(5): 4403–4412. [Article] [Google Scholar]
- TANG Y, CHENG N, WU W, et al. Delay-minimization routing for heterogeneous VANETs with machine learning based mobility prediction[J]. IEEE Trans on Vehicular Technology, 2019, 68(4): 3967–3979 [Google Scholar]
- BAMHDI A M. Efficient dynamic-power AODV routing protocol based on node density[J]. Computer Standards & Interfaces, 2020, 70: 103406 [Google Scholar]
- MOHAMMED F A B, MEKKY N, SULEIMAN H H, et al. Sectored LEACH (S-LEACH): an enhanced LEACH for wireless sensor network[J]. IET Wireless Sensor Systems, 2022, 12(2): 56–66 [Google Scholar]
All Tables
All Figures
|
图1 胞元单体分级与功能配件 |
| In the text | |
|
图2 十字形大型空间阵列望远镜 |
| In the text | |
|
图3 胞元航天器自组网策略流程图 |
| In the text | |
|
图4 不同自组网方法系统剩余能量对比 |
| In the text | |
|
图5 不同自组网方法系统时延对比 |
| In the text | |
|
图6 不同自组网协议系统吞吐量对比 |
| In the text | |
|
图7 不同自组网协议系统丢包率对比 |
| In the text | |
|
图8 应用本文策略的自组网拓扑 |
| In the text | |
|
图9 应用LEACH算法的自组网拓扑 |
| In the text | |
|
图10 胞元航天器缩比实验示意图 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.