| Issue |
JNWPU
Volume 37, Number 5, October 2019
|
|
|---|---|---|
| Page(s) | 857 - 864 | |
| DOI | https://doi.org/10.1051/jnwpu/20193750857 | |
| Published online | 14 January 2020 | |
Joint DOD and DOA Estimation Using Reduced-Capon Method in Bistatic MIMO Array
基于降维 Capon 的双基地 MIMO 阵列目标 DOD 和 DOA 联合估计算法
School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China
Received:
20
October
2018
Abstract
In order to resolve the problem of joint direction of departure (DOD) and direction of arrival (DOA) estimation in bistatic MIMO array, a dimensional reduced-Capon method based on Taylor series expansion and signal subspace is proposed in this paper. Firstly, the Taylor series expansion of the steering vector is used to reduce the two-dimensional (2D) spectrum peak searching of Capon method to one-dimensional searching. Then, the DOD estimator can be achieved via Lagrange multiplier by one-dimension search. Finally, the steering vector of DOA corresponding to the DOD estimator is achieved and the DOA can be estimated. Hence, the estimated DOD and DOA are obtained automatically paired. And also, the proposed method can avoid the high computational complexity of MIMO Capon method. Simulation results are presented to illustrate the effectiveness of the proposed method.
摘要
针对双基地多输入多输出(MIMO)阵列目标DOD(发射角)和DOA(接收角)联合估计问题,提出了一种基于泰勒级数展开的降维Capon联合收发角估计算法。该算法首先利用泰勒级数将阵列流型矢量展开,将需要二维搜索的MIMO Capon算法降为一维搜索,然后利用拉格朗日算子通过一维搜索获得目标的DOD,最后将估计的DOD代入阵列流型矢量中获得接收阵列流型矢量,从而估计出与DOD相对应的DOA。该算法无需二维谱峰搜索,通过一维搜索得到目标收发角,且DOD和DOA自动配对。与现有算法相比,该算法不仅能够获得较好的角度分辨率,而且有效降低了运算量。仿真结果验证了所提算法的有效性。
Key words: bistatic MIMO array / direction of departure (DOD) / direction of arrival (DOA) / Taylor series expansion / Capon / joint estimation / dimension reduction / simulation
关键字 : 双基地多输入多输出(MIMO)阵列 / 发射角(DOD) / 接收角(DOA) / 泰勒级数展开 / Capon
© 2019 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
近年来, 在多输入多输出(multiple-input multiple output, MIMO)通信技术的快速发展与成熟推动下, MIMO阵列技术也逐渐成为阵列信号处理学术界研究的热点, MIMO雷达和MIMO声呐(为叙述简洁, 下文将MIMO雷达阵列和MIMO声呐阵列统称为MIMO阵列)也应运而生[1-1]。与常规相控阵阵元发射相同波形信号并通过相位延迟来调整发射波束指向性不同, MIMO阵列的各阵元可发射不相关或互相正交的波形, 并利用接收阵元来接收目标的回波信号。回波信号均经过匹配滤波器处理, 其效果相当于增加了虚拟阵元, 增大了阵列的虚拟孔径, 从而获得更多的自由度, 具有可检测目标数目增多等较常规相控阵更好的性能。
根据收发阵列布阵方式的不同, MIMO阵列可分为分布式MIMO阵列(distributed MIMO array)和合置式MIMO阵列(co-located MIMO array)。分布式MIMO阵列也被称为统计式MIMO阵列(statistical MIMO array)[6-6], 其阵元间距较大, 可通过远距离布置的发射和接收阵元满足空间分集, 并从不同的角度观测目标以抑制目标闪烁来获得空间分集增益, 从而提高系统的探测性能。合置式MIMO阵列[8]主要分为单基地MIMO阵列(monostatic MIMO array)[9-9]和双基地MIMO阵列(bistatic MIMO array)[11-11]。合置式MIMO阵列由于收发阵列内部的阵元间距较小, 不具有空间分集的特点, 但其可以利用发射阵列发射正交信号和匹配滤波处理来获得波形分集增益, 从而形成大的虚拟阵列孔径, 进而增加系统可检测的目标个数和提高系统的角度分辨力。
本文中研究的是双基地MIMO阵列, 因此下文中如无特殊申明, MIMO阵列默认为双基地MIMO阵列。目标的发射角(direction of departure, DOD)和接收角(direction of arrival, DOA)联合估计是双基地MIMO阵列的重要空域参数估计问题[12-12], 也是研究的热点之一。文献[17-18]分别提出了基于MUSIC算法和Capon算法的谱峰搜索算法来实现多目标的DOD和DOA联合估计, 但涉及到二维的谱峰搜索, 运算量较大, 特别是当要求搜索范围较大, 估计精度较高时, 运算量巨大。为解决MIMO Capon计算量大的问题, 文献[19]利用发射阵列流型矢量和接收阵列流型矢量Kronecker积的形式变换, 提出了降维Capon算法, 避免了二维搜索的运算量, 但是文中并未考虑发射角和接收角的配对问题, 仍然需要进一步的配对算法来解决发射角和接收角角度非顺序排列时配对失效的问题。文献[20]将ESPRIT算法同时应用到MIMO阵列的发射端和接收端, 利用旋转不变子空间方法对目标的DOD和DOA分别进行了估计, 不需要进行二维谱峰搜索, 与MIMO MUSIC和MIMO Capon相比, 具有较好的实时性, 但是需要额外的目标角度配对。文献[21]在文献[20]中MIMO ESPRIT算法的基础上进行了改进, 利用发射端和接收端的2个ESPRIT之间的关系对目标的DOD和DOA进行了自动配对, 从而解决了需要额外目标角度配对算法的问题。文献[22]针对L型阵列二维DOA估计的问题, 采用空间平滑和半实值降维Capon算法, 提出了基于降维Capon的相干信号二维DOA估计算法。文献[23]提出了面阵中基于降维Capon的二维波达方向估计算法。二者所面向的是L型阵列或者面阵, 均未涉及到MIMO阵列, 且采用的降维方式也和本文中的方法不同。
本文提出了一种降维Capon的双基地MIMO阵列目标角度联合估计算法。首先利用泰勒级数展开阵列流型矢量, 然后利用拉格朗日算子一维搜索出目标的DOD, 最后再代入接收阵列流型矢量, 求解得到目标的DOA, 且得到的目标DOD和DOA自动配对, 不需要额外的配对运算。该算法避免了二维普搜索和参数配对过程, 在降低算法运算复杂度的基础上, 保持了DOD和DOA参数估计性能, 利于工程实现。仿真结果验证了本文所提算法的有效性。
1 信号模型
如图 1所示双基地MIMO阵列中, 发射阵列有Mt个发射阵元, 接收阵列有Mr个接收阵元, 阵元间距分别为dt和dr, 所有阵元均为各向同性。在发射端, Mt个发射阵元分别同时发射M个正交窄带波形, 发射信号经目标反射后, 由接收阵列的Mr个接收阵元接收回波信号。λ为信号波长。
假设有一个空间远场目标, 发射角DOD和接收角DOA分别为θ和ϕ, 则一个脉冲周期内的接收数据为[18]
 (1)
(1)
式中
 (2)
(2)
 (3)
(3)
分别表示发射阵列流型矢量和接收阵列流型矢量。其中(·)T表示矩阵或者向量的转置运算。α是发射信号对目标的双程传播衰减和反射响应幅度。s(n)=[s1(n), …, sMt(n)]T为正交发射信号, v(n)是MIMO阵列接收阵元上的零均值复高斯白噪声, 且v~Nc(0, σv2 IMr)。当有P个目标时, (1)式写为
 (4)
(4)
式中
 (5)
(5)
 (6)
(6)
式中,diag(α)表示对角矩阵, 其中对角线元素为向量α=[α1, α2, …, αP]T。
利用Mt个发射信号与阵列接收到的数据进行匹配滤波, 得到的匹配滤波输出为
 (7)
(7)
式中, (·)H表示矩阵或者向量的共轭转置运算, 将(1)式代入(7)式可得
 (8)
(8)
式中
 (9)
(9)
由于MIMO阵列中s(n)为正交发射信号, 因此Rs为单位矩阵。
将(8)式两边做拉直处理, 即可得到MIMO虚拟阵列输出[18]
 (10)
(10)
式中,vec(·)表示矩阵列拉直运算, a(ϕ, θ)=ar(ϕ)⊗at(θ)是MtMr×1的虚阵列的拟响应矩阵, ⊗是Kronecker积运算。
 (11)
(11)
为零均值复高斯白噪声, 且N~Nc(0, σv2IMtMr)。
当有P个目标, Q个发射脉冲周期时, (10)式可表示为
 (12)
(12)
式中
 (13)
(13)
 (14)
(14)
 (15)
(15)
αpq为第p个目标在第q个发射脉冲周期的双程传播衰减和反射响应幅度, 本文中假设αpq服从零均值复高斯分布。
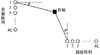 |
图 1 双基地MIMO阵列系统示意图 |
2 降维Capon目标方位估计算法
2.1 MIMO Capon目标方位估计算法
在多快拍下, 由(12)式可得接收阵列输出数据的自相关矩阵R
 (16)
(16)
由文献[18]可以根据输出数据的自相关矩阵得到MIMO Capon算法的空间谱。
 (17)
(17)
利用(17)式进行二维的谱峰搜索即可找到目标的DOD和DOA, 运算量较大, 特别是当要求搜索范围较大, 估计精度较高, 搜索步长较小时, 运算量巨大。
2.2 降维Capon目标方位估计算法
针对MIMO Capon算法运算量大的问题, 本节提出了基于泰勒级数展开的降维MIMO Capon目标方位估计方法。将二维的谱峰搜索转换为一维的谱峰搜索, 在降低运算量的同时, 可保持MIMO Capon算法的估计性能, 并实现目标DOD和DOA的自动配对。
假设ϕ为冗余参数, 将阵列流型矢量a(θ, ϕ)在ϕ=ϕ0点通过L阶泰勒级数展开为
 (18)
(18)
式中
 (19)
(19)
 (20)
(20)
a(l)(θ, ϕ0)为a(θ, ϕ)在ϕ=ϕ0点泰勒级数展开的第l阶导数。将(18)式代入MIMO Capon空间谱(17)式中得
 (21)
(21)
定义
 (22)
(22)
则(21)式可简写为
 (23)
(23)
式中
 (24)
(24)
且
 (25)
(25)
则最优问题可以重构为
 (26)
(26)
式中,e=[1, 0, …, 0]T∈CL×1。利用拉格朗日算子, 代价函数可以由下式获得
 (27)
(27)
式中,λL为常数。对(27)式两边求微分可得
 (28)
(28)
当(28)式等于零, 可求得V(ϕ)
 (29)
(29)
式中, 也为常数。e=[1, 0, …, 0]T∈CL×1, 则有eHV(ϕ)=1, 即
也为常数。e=[1, 0, …, 0]T∈CL×1, 则有eHV(ϕ)=1, 即
 (30)
(30)
由(30)式可得
 (31)
(31)
将β的表达式代入(29)式中, 有
 (32)
(32)
将V(ϕ)表达式代入(26)式的优化问题中, 可以通过下式得到目标发射角DOD的估计
 (33)
(33)
通过在θ∈[-90°, 90°]搜索Q-1(θ)中(1, 1)元素的最大值来获得( ), 即可获得目标发射角DOD的估计值。此外, 由(17)式可以得到, 假设有
), 即可获得目标发射角DOD的估计值。此外, 由(17)式可以得到, 假设有
 (34)
(34)
发射角 已经由(33)式估计, 则假设(34)式中
已经由(33)式估计, 则假设(34)式中
 (35)
(35)
则
 (36)
(36)
则有以下优化问题
 (37)
(37)
即通过求解下式得到接收阵列流型矢量 的值
的值
 (38)
(38)
又有接收阵列流型矢量 的表达式
的表达式
 (39)
(39)
则
 (40)
(40)
对估计出来的接收角 求平均, 有
求平均, 有
 (41)
(41)
由此, 可以获得接收角DOA的估计值, 且与发射角DOD自动匹配。
2.3 所提算法流程
本文提出了一种基于泰勒级数展开的降维Capon联合收发角估计算法。具体算法步骤如下:
步骤1 根据(16)式计算接收阵列输出数据的自相关矩阵R;
步骤2 由(18)式求得阵列流型矢量a(θ, ϕ)的泰勒级数展开求得U(θ);
步骤3 利用(25)式获得Q(θ), 在[-90°, 90°]范围内搜索Q-1(θ)中(1, 1)元素的最大值来获得发射角DOD;
步骤4 通过(2)式计算发射阵列流型矢量, 并用(35)式求得 ;
;
步骤5 求解(38)式获得接收阵列流型矢量 , 利用(40)式和(41)式估计出接收角DOA。
, 利用(40)式和(41)式估计出接收角DOA。
3 仿真性能分析
本节对本文所提的基于泰勒级数展开的降维Capon联合收发角估计算法进行计算机性能仿真实验, 定义均方根误差(ERMS)如下式所示
 (42)
(42)
式中, 表示第p个目标在第i次Monte Carlo实验中的DOD或者DOA估计值, Lc表示Monte Carlo实验次数。
表示第p个目标在第i次Monte Carlo实验中的DOD或者DOA估计值, Lc表示Monte Carlo实验次数。
假设双基地MIMO发射和接收阵元数为Mt=8, Mr=6, 且均为半波长布阵的均匀线列阵。在发射端, 各个阵元同时发射窄带正交信号(多路高斯白噪声通过窄带滤波器正交信号), 分别进行以下实验。
仿真实验1 算法的有效性验证
假设远场空域存在4个分别位于(θ1, ϕ1)=(10°, 15°), (θ2, ϕ2)=(20°, -25°), (θ3, ϕ3)=(30°, 35°), (θ4, ϕ4)=(40°, -45°)的目标, 信噪比为RSN=0 dB, 快拍数N=500, 泰勒级数展开按照L=6在ϕ0=30°处展开, Monte Carlo实验次数为200次以验证本文所提算法的有效性, 仿真结果如图 2所示。图 2a)和2b)分别给出了本文算法对多目标DOD和DOA的估计, 图 2c)为本文算法得到的目标估计角度星座图, 其中“×”表示目标的真实方位。从图 2可以看出, 本文算法能够正确估计目标的DOD和DOA, 且二者可以直接自动配对, 可实现对多目标进行有效的方位估计。
仿真实验2 算法方位估计性能与信噪比的关系
针对仿真实验1中的4个远场目标, (θ1, ϕ1)=(10°, 15°), (θ2, ϕ2)=(20°, -25°), (θ3, ϕ3)=(30°, 35°), (θ4, ϕ4)=(40°, -45°), 信噪比从-10~10 dB, 间隔2 dB, 将本文算法与MIMO Capon[18]和MIMO RD Capon算法[19]进行性能分析比较。快拍数N=500, 本文算法泰勒级数展开按照L=6在ϕ0=30°处展开, 所涉及到的空间谱搜索步长均为0.1°, Monte Carlo实验次数为200, 仿真实验结果如图 3和图 4所示。
由图中可以看出, 随着信噪比的增大, 3种算法对目标的DOD和DOA估计的ERMS都逐渐减小, 且信噪比越大, 目标方位的估计精度越高。由于本文中将阵列流型矢量做泰勒级数展开时, 选择的是6阶展开, 因此在舍弃更高阶的展开式后, 简化了计算时间, 并避免了不必要的精度计算。此外, 利用拉格朗日算子, 通过求取Q-1(θ)中最大值的模式来获得在目标的DOD估计值, 抑制了噪声在整个求解过程中的作用。当信噪比增大时, 抑制效果减小。因此, 与MIMO Capon和MIMO RD Capon算法相比, 在低信噪比时, 本文算法的DOD估计精度略高于其他2种算法。此外, 由于MIMO RD Capon算法存在目标方位DOD和DOA估计失配的问题, 本文中MIMO RD Capon算法的DOA估计采用与本文所提算法相同的方法来进行估计。因此, 目标方位的DOA估计结果中, MIMO RD Capon算法和本文所提算法估计精度相当, 在低信噪比时, 估计精度略高于MIMO Capon算法。
仿真实验3 算法方位估计性能与快拍数的关系
4个远场目标与仿真实验1和仿真实验2中的相同, 信噪比-5 dB, 本文算法泰勒级数展开按照L=6在ϕ0=30°处展开, 所涉及到的空间谱搜索步长均为0.1°, Monte Carlo实验次数为200。快拍数从100~1 000, 间隔100, 比较不同快拍数下本文算法与MIMO Capon和MIMO RD Capon算法的估计性能。与仿真实验2中相同, 本文中MIMO RD Capon算法的DOA估计采用与本文所提算法DOA估计的方法来进行估计, 仿真实验结果如图 5和图 6所示。
由图中可以看出, 随着快拍数的增大, 3种算法对目标的DOD和DOA估计的ERMS都逐渐减小, 且快拍数越大, 目标方位的估计精度越高。不过, 当快拍数大于500时, ERMS的降幅逐渐减小, 随着快拍数的增大, ERMS趋于恒定。与MIMO Capon和MIMO RD Capon算法相比, 本文算法的DOD估计精度随着快拍数的增加, 始终高于其他2种算法。目标方位的DOA估计结果中, 优于MIMO RD Capon算法采用与本文所提算法相同的DOA估计方法, 因此, 二者估计精度相当, 且均高于MIMO Capon算法估计精度。
仿真实验4 算法方位估计性能与泰勒级数展开阶数的关系
4个远场目标与仿真实验1、仿真实验2和仿真实验3中的相同, 信噪比从-10~10 dB, 间隔2 dB, 快拍数N=500, 将本文算法泰勒级数分别按照L=3, L=4, L=5和L=6在ϕ0=30°处展开, 所涉及到的空间谱搜索步长均为0.1°, Monte Carlo实验次数为200, 仿真实验结果如图 7和图 8所示。
由图中可以看出, 不同展开阶数L所对应的算法性能随着信噪比的增大, 对目标的DOD和DOA估计的ERMS都逐渐减小。当展开阶数L为5或者6时, 二者的方位估计精度相当。因此, 本文算法在泰勒级数展开选择展开阶数时, 并不是越大越好, 在达到某一阶数后, 算法的性能将不会随着阶数的增加而变得更好。
 |
图 2 DOD和DOA联合估计 |
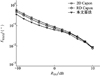 |
图 3 DOD估计的ERMS随RSN的变化 |
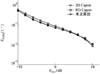 |
图 4 DOA估计的ERMS随RSN的变化 |
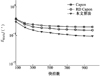 |
图 5 DOD估计的ERMS随快拍数的变化 |
 |
图 6 DOA估计的ERMS随快拍数的变化 |
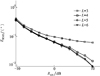 |
图 7 DOD估计的ERMS随RSN的变化 |
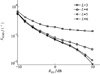 |
图 8 DOA估计的ERMS随RSN的变化 |
4 结论
本文针对双基地多输入多输出(MIMO)阵列目标DOD(发射角)和DOA(接收角)联合估计问题, 提出了基于泰勒级数展开的降维Capon联合收发角估计算法。该算法利用泰勒级数将MIMO阵列的阵列流型矢量展开, 避免了复杂的二维谱峰搜索, 将二维参数联合估计降为一维空域搜索, 降低了运算量。与现有算法相比, 该算法不仅提高了低信噪比下的目标参数估计精度, 而且有效降低了运算量, 同时可以实现DOD和DOA估计的自动配对。
References
- Fishler E, Haimovich A, Blum R, et al. MIMO Radar: an Idea Whose Time Has Come[C]//Proceedings of the IEEE Radar Conference, Newark, NJ, USA, 2004: 71–78 [Article] [Google Scholar]
- Guan Jian, Li Xiuyou, Huang Yong, et al. Knowledge-Aided MIMO Radar Waveform Design Method[J]. Journal of Electronics & Information Technology, 2016, 38(12): 3063–3069 [Article] [Google Scholar]
- Mao L, Li H, Zhang Q. Transmit Design and DOA Estimation for Wideband MIMO System with Colocated Nested Arrays[J]. Signal Process, 2018, 152(11): 63–68 [Article] [CrossRef] [Google Scholar]
- Mao L, Li H, Zhang Q. Transmit Subaperturing for MIMO Radars with Nested Arrays[J]. Signal Process, 2017, 134(5): 244–248 [Article] [CrossRef] [Google Scholar]
- Bekkerman I, Tabrikian J. Target Detection and Localization Using MIMO Radars and Sonars[J]. IEEE Trans on Signal Process, 2006, 54(10): 3873–3883 [Article] [Google Scholar]
- Haimovich A, Blum R, Cimini L. MIMO Radar with Widely Separated Antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116–129 [Article] [NASA ADS] [CrossRef] [Google Scholar]
- Hu Q, Su H, Zhou S, et al. Two-Stage Constant False Alarm Rate Detection for Distributed Multiple-Input-Multiple-Output Radar[J]. IET Radar Sonar & Navigation, 2016, 10(2): 264–271 [Article] [CrossRef] [Google Scholar]
- Li J, Stoica P. MIMO Radar with Colocated Antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114 [Article] [NASA ADS] [CrossRef] [Google Scholar]
- Huang P, Wang H, Yang C. Non Circular ROOTMUSIC Algorithm for Monostatic MIMO Radar[J]. IEICE Electron Express, 2014, 11(13): 1–7 [Article] [Google Scholar]
- Liu J, Wang X, Zhou W. Covariance Vector Sparsity-Aware DOA Estimation for Monostatic MIMO Radar with Unknown Mutual Coupling[J]. Signal Processing, 2016, 119(2): 21–27 [Article] [CrossRef] [Google Scholar]
- Li li, Qiu Tianshuang. Parameter Jointly Estimation Algorithm in Bistatic MIMO Radar under Impulsive Noise Environment Based on Maximum Correntropy Criterion[J]. Journal of Electronics & Information Technology, 2016, 38(12): 3189–3196 [Article] [Google Scholar]
- Chen S, Meng C, Cahng A. DOA and DOD Estimation Based on Double 1-D Root-MVDR Estimation for Bistatic MIMO Radars[J]. Wireless Personal Communication, 2016, 86(3): 1321–1332 [Article] [CrossRef] [Google Scholar]
- Chen J, Gu H, Su W. A New Method for Joint DOD and DOA Estimation in Bistatic MIMO Radar[J]. Signal Processing, 2009, 90(2): 714–718 [Article] [CrossRef] [Google Scholar]
- Guo Y, Feng C, Zhang Y, et al. Joint DOD and DOA Estimation for Bistatic MIMO Radar with Combined Array Errors[C]//Proceeding of IET International Radar Conference, Hangzhou, China, 2015: 1497–1502 [Google Scholar]
- Yeo K, Chung Y, Yang H, et al. Reduceddimension DOD and DOA Estimation through Projection Filtering in Bistatic MIMO Radar with Jammer Discrimination[J]. IET Radar, Sonar and Navigation, 2017, 11(8): 1228–1234 [Article] [CrossRef] [Google Scholar]
- Xu B, Zhao Y, Cheng Z, et al. A Novel Unitary Parafac Method for Dod and Doa Estimation in Bistatic Mimo Radar[J]. Signal Processing, 2017, 138(C)273–279 [Article] [CrossRef] [Google Scholar]
- Li J, Conan J, Pierre S. Joint Estimation of Channel Parameter for MIMO Communication Systems[C]//2nd International Symposium on Wireless Communication Systems, Siena, Italy, 2005: 22–26 [Article] [Google Scholar]
- Yan H, Li J, Liao G. Multitarget Identification and Localization Using Bistatic MIMO Radar systems[J]. EURASIP Journal on Advances in Signal Processing, 2008, 8(2): 1–8 [Article] [Google Scholar]
- Zhang X, Xu D. Angle Estimation in MIMO Radar Using Reduced-Dimension Capon[J]. Electronics Letters, 2010, 46(12): 860–861 [Article] [NASA ADS] [CrossRef] [Google Scholar]
- Chen D, Chen B, Qin G. Angle Estimation Using ESPRIT in MIMO Radar[J]. Electronics Letters, 2008, 44(12): 770–771 [Article] [NASA ADS] [CrossRef] [Google Scholar]
- Chen Jinli, Gu Hong, Su Weiming. A Method for Fast Multi-Target Localization in Bistatic MIMO Radar System[J]. Journal of Electronics & Information Technology, 2009, 31(7): 1664–1668 [Article] [Google Scholar]
- Liu Yaning, Zhang Qin, Zheng Guimei. 2-Dimensional DOA Estimation Algorithm of Coherent Signals Based on Reduced-Dimension Capon[J]. Jouranl of Detection & Control, 2018, 40(5): 105–110 [Article] [Google Scholar]
- Jiang Chi, Zhang Xiaofei, Zhang Licen. Two-Dimensional DOA Estimation for Planar Array via Reduced-Dimension Caponn[J]. Journal of Applied Sciences-Electronics and Information Engineering, 2015, 33(2): 167–177 [Article] [Google Scholar]
All Figures
|
图 1 双基地MIMO阵列系统示意图 |
| In the text | |
|
图 2 DOD和DOA联合估计 |
| In the text | |
|
图 3 DOD估计的ERMS随RSN的变化 |
| In the text | |
|
图 4 DOA估计的ERMS随RSN的变化 |
| In the text | |
|
图 5 DOD估计的ERMS随快拍数的变化 |
| In the text | |
|
图 6 DOA估计的ERMS随快拍数的变化 |
| In the text | |
|
图 7 DOD估计的ERMS随RSN的变化 |
| In the text | |
|
图 8 DOA估计的ERMS随RSN的变化 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.