| Issue |
JNWPU
Volume 42, Number 4, August 2024
|
|
|---|---|---|
| Page(s) | 662 - 672 | |
| DOI | https://doi.org/10.1051/jnwpu/20244240662 | |
| Published online | 08 October 2024 | |
Research on morphing aircraft maneuver control based on active disturbance rejection control
基于自抗扰控制的变体飞机机动控制研究
1
School of Automation, Northwestern Polytechnical University, Xi'an 710129, China
2
Shaanxi Province Key Laboratory of Flight Control and Simulation Technology, Xi'an 710129, China
Received:
5
July
2023
Abstract
Aiming at the problems of model uncertainties caused by morphing aircraft during morphing process and disturbance encountered when maneuvering, a morphing aircraft maneuver control method based on active disturbance rejection control (ADRC) is proposed to eliminate the influences of model uncertainty and external disturbance and improve the rapidity and accuracy of maneuver control. Firstly, a nonlinear model for morphing aircraft is established and the impact mechanism of morphing process is analyzed. Then, the ADRC technique is used to design the angular rate robust control law and the control performance of ADRC law is analyzed under the influence of disturbance. Finally, the immelmann turn maneuver is selected to verify the performance of the designed control law with aerodynamic parameters perturbation combined with the morphing process. The simulation results show that the method possesses good decoupling effect and strong disturbance rejection ability. Moreover, the aircraft's maneuverability and the control margin of control surface can be effectively improved through morphing
摘要
针对变体飞机变体过程中的模型不确定性和机动过程中遇到的扰动等问题, 提出一种基于自抗扰控制的变体飞机机动控制方法, 用于消除模型不确定性和外界扰动的影响以及提高机动控制的快速性和准确性。建立变体飞机非线性运动模型并分析变体飞机变体过程对飞机影响机理; 采用自抗扰控制技术设计角速度鲁棒控制律; 在扰动影响下分析了自抗扰控制律的控制性能; 在气动参数扰动下结合变体过程, 选取上半滚倒转机动验证所设计控制律的性能。数值仿真结果表明, 自抗扰控制器能够消除模型不确定性、外界扰动和不同通道间的强耦合作用, 完成上半滚倒转机动的控制, 具有较好的解耦效果和较强的抗扰动能力, 并且通过变体可以有效地提高飞机的机动性能和操纵面的控制裕度。
Key words: morphing aircraft / active disturbance rejection control / maneuver control / decoupling control
关键字 : 变体飞机 / 自抗扰控制 / 机动控制 / 解耦控制
© 2024 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
在现代空战中, 飞机不再执行单一的任务, 需要同时兼顾低速巡航与高速机动, 因此变体飞机成为完美融合这二者的一个解决方案。变体飞机可兼顾起降、巡航、作战、机动等多任务需求, 在改善飞行器的空气动力学性能、扩大飞行包线、增加续航时间等方面有其独特优势[1]。对变体飞机的分析和控制研究, 可以有效拓宽单一机种的作战用途和作战半径。但也正是由于变体飞机能够在飞行过程中大范围改变飞机基本参数和气动参数, 一般的控制方法很难保证其飞行稳定性, 需要提高飞行控制系统的鲁棒性来保障其变体和机动过程中的飞行稳定性。
为解决变体飞机飞行稳定性问题, 许多专家学者纷纷投入了对变体飞机飞行控制技术的研究。文献[2]针对一种可变后掠翼、伸缩翼的变体飞机建立了线性变参数模型, 设计了全阶输出加权反馈控制器, 满足飞机变体的性能要求, 可用于全包线飞行控制系统设计。文献[3]针对非对称变翼飞行器的姿态控制问题, 将干扰观测器和滑模变结构控制方法结合, 使用该方法设计出的姿态控制系统能有效抑制变形过程中的扰动, 对气动参数摄动具有良好的鲁棒性。文献[4]针对变体飞机非线性模型的不确定性问题, 提出了一种基于径向基神经网络的高精度自适应反步控制方法, 解决了传统反步法存在的“微分膨胀”问题, 控制精度高且鲁棒性强。文献[5]针对具有模型不确定性、外部扰动和执行器故障的变体飞机, 研究了基于固定时间观测器的反步容错控制方法, 并通过数值仿真验证了该方法的有效性。文献[6]设计了一种多模型切换的模型预测控制器, 通过协调控制变形机构、发动机推力和升降舵来优化飞行性能。文献[7]提出了一种基于增量反步法的变体飞机轨迹跟踪方法, 将增量反步法用于飞机的姿态、高度、速度和侧滑角控制律设计, 并用变体结构进行轨迹跟踪补偿。
与常规飞机不同的是, 变体飞机在机动飞行过程中, 可以通过变体改变自身的空气动力学特性, 获得最适合该机动的外形或构型。然而, 在机动飞行过程中, 飞机还存在着飞行动作复杂、状态快速变化等特点, 对外界气流变化与扰动更加敏感, 模型不确定性的影响也被放大。为解决变体带来的气动参数变化、模型不确定性和机动过程中的外界扰动等问题, 控制系统不能依赖模型信息, 并且应具有较好的控制性能和较强的鲁棒性。
自抗扰控制技术(active disturbance rejection control, ADRC)[8–11]是一种不依赖于系统精确模型的控制方法, 而变体飞机本身就是一个模型不确定性较强的系统, 再加上机动过程中的外界扰动, 正好与自抗扰控制估计消除扰动与不确定性的思想不谋而合。文献[12–13]将自抗扰控制分别用于一种主动变形四旋翼和一种具有全向推力矢量的可倾转四旋翼的位姿控制, 具有较强的稳定性和抗风扰能力, 同时对系统部分动力失效故障有较强的鲁棒性。文献[14]对折叠翼飞行器设计了自抗扰控制器, 并结合改进平衡优化算法整定了控制器参数, 样机试飞验证显示, 改进的自抗扰控制器具有良好的抗风扰能力。文献[15–16]将自抗扰控制应用于推力矢量飞机大迎角机动中, 均取得了较好的结果。综上可知, 自抗扰控制不仅适用于变体飞行器的飞行控制, 同样适用于机动飞行控制。
本文以变后掠翼飞机为研究对象, 将变体与机动飞行相结合, 使用自抗扰控制来应对变体飞机机动飞行过程中的大范围不确定性与外界扰动。在俯仰、滚转、偏航3个通道中分别设计角速度自抗扰控制器, 将不同通道间的耦合、变体带来的模型不确定性和机动过程中的参数扰动作为系统的总扰动, 利用扩张状态观测器进行估计并加以消除。选取上半滚倒转机动进行验证, 分析机动不同时刻所对应的最优变体构型, 利用数值仿真验证所提方法的有效性。
1 变体飞机建模与扰动分析
1.1 变体飞机建模
本文所用的变体飞机为常规布局的变后掠翼飞机, 其后掠角可在20°~68°之间变化, 如图 1所示。
发动机的安装位置与机体轴线重合。飞机模型质量为m=25.539 kg, 表 1给出了飞机在不同构型时的基本外形参数和转动惯量。
变体飞机的建模与常规飞机不同, 其可变部分在变化时会对全机产生附加的力和力矩, 由文献[17–18], 变体飞机的运动学方程可以表示为
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中:V表示速度;α, β分别表示迎角和侧滑角;p, q, r分别表示机体系下的三轴角速度;D, Y, L, T分别表示阻力、侧力、升力和发动机推力;LA, MA, NA分别表示滚转力矩、俯仰力矩和偏航力矩;m为飞机质量;g为重力加速度;Sx表示飞机静矩在机体系x轴上的分量;FIx, FIy, FIz表示变体过程引起惯性力在气流系三轴上的分量;MIx, MIy, MIz表示变体过程引起的惯性力矩在机体系三轴上的分量。ΔD, ΔY, ΔL表示变体导致气动参数变化引起的气动力变化量, ΔL, ΔM, ΔN表示变体导致气动参数变化引起气动力矩变化量。系数c*的表达式见文献[18]。
 |
图1 不同构型下的变后掠翼飞机 |
变体飞机不同构型参数
1.2 系统扰动分析
扰动下的变体飞机角速度微分方程可以表述为(7)式所示仿射非线性形式
 (7)
(7)
式中, xpqr(t)=[p q r]T, Fpqr(x)表示与控制无关的向量函数; Gpqr(x)表示与控制相关的系统控制效能矩阵; u(t)=[δa δe δr]T是系统的输入, 即副翼、升降舵和方向舵; C表示系统的输出矩阵, y(t)是系统输出。δ(x, t)=δ1(x, t)+δ2(x, t)+δ3(x, t)表示系统受到的扰动, 可分为以下三部分:
δ1(x, t)是变体带来的附加力和力矩扰动,如(1)~(6)式中的FIx, FIy, FIz, MIx, MIy, MIz。这一部分主要与可变体部分在变体时产生的惯性力和惯性力矩有关。δ1(x, t)具体表示为
 (8)
(8)
δ2(x, t)是变体导致的气动参数变化带来的扰动。相较于未变体时, 变体过程中和变体完成的飞机在气动外形上已经发生了改变, 相应地, 其气动参数也会发生变化。飞机的气动力F=[D, Y, L]T和气动力矩M=[LA, MA, NA]T具体表示为
 (9)
(9)
 (10)
(10)
式中:σ=diag(b, cA, b), b和cA分别表示展长和平均气动弦长;Q和Sw分别表示动压和机翼面积; ,
,  ,
,  为无量纲的角速度;C**表示相应的气动导数;ΔF=[ΔD ΔY ΔL]T表示变体导致气动参数变化引起的气动力变化量;ΔM=[ΔL ΔM ΔN]T表示变体导致气动参数变化引起的气动力矩变化量。δ2(x, t)具体表示为
为无量纲的角速度;C**表示相应的气动导数;ΔF=[ΔD ΔY ΔL]T表示变体导致气动参数变化引起的气动力变化量;ΔM=[ΔL ΔM ΔN]T表示变体导致气动参数变化引起的气动力矩变化量。δ2(x, t)具体表示为
 (11)
(11)
δ3(x, t)是系统外部的扰动以及机动过程中产生的模型不确定性。
2 ADRC角速度控制律设计
ADRC主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)以及非线性状态误差反馈控制律(nonlinear state error feedback, NLSEF)组成。本文需要分别设计俯仰角速度、滚转角速度和偏航角速度3个自抗扰控制器, 用于机动飞行控制和通道间的解耦。
由(4)~(7)式和(10)式可得角速度回路的非线性运动方程为
 (12)
(12)
式中: fp包含了在滚转角速度p回路中, 所有与副翼δa无关的项; fq包含了在俯仰角速度q回路中, 所有与升降舵δe无关的项, fr包含了在滚转角速度r回路中, 所有与方向舵δr无关的项, fp, fq, fr分别称为各自回路的“总扰动”; bp, bq, br分别为角速度回路控制输入δa, δe, δr的系数。MAδe, NAδa, NAδr, LAδa, LAδr分别表示去除右上标对应的舵面操纵力矩后的剩余力矩, 具体表达式为
 (13)
(13)
根据上文构建的变体飞机模型, 设计角速度回路ADRC控制律, 下文如无特别说明,则i=p, q, r。
1) 跟踪微分器TD
 (14)
(14)
式中: vcmd, i为输入的指令信号; v1, i为vcmd, i的跟踪信号, 也可以看作经过连续和平滑后的指令信号, v2, i为v1, i的微分信号, 可近似看作vcmd, i的微分信号, h为采样步长。r0, h0分别为速度因子和滤波因子。
2) 扩张观测器ESO
 (15)
(15)
式中: β01, i, β02, i, Δi是需要整定的参数; b0, i是参数bi的标称值, 可按照(12)式由配平值计算得出; h是采样步长; z1, i是系统输出状态yi的估计值; z2, i是总扰动fi的估计值。函数fhan(·)和fal(·)的具体表达式见文献[8]。
3) 非线性状态误差反馈控制律
 (16)
(16)
式中, up=δa, uq=δe, ur=δr。
TD用于获取平滑后的指令信号及其微分信号;ESO用于估计扩张后系统的状态。综上, 变体飞机ADRC控制律整体结构如图 2所示。
 |
图2 变体飞机角速度ADRC控制律整体结构图 |
3 ADRC控制律性能分析
本节对第2节设计的ADRC角速度控制律进行收敛性分析, 以(12)
式中滚转角速度控制律为例, 俯仰角速度与偏航角速度同理。
由ṗ=fp+bpδa, 令x1=p, ẋ1=ṗ=fp+bpδa, x2=fp, y=x1, 滚转角速度系统表达式为
 (17)
(17)
ESO表达式为
 (18)
(18)
对(18)式进行变形, 取β01= =ω, β02=
=ω, β02= =ω2; 再由fal(·)函数的性质可知,
=ω2; 再由fal(·)函数的性质可知,  -x1=fal(
-x1=fal( -x1, 1, Δ), 记g1(
-x1, 1, Δ), 记g1( -x1)=fal(-x1, 1, Δ), g2(
-x1)=fal(-x1, 1, Δ), g2( -x1)=fal(
-x1)=fal( -x1, 0.5, Δ), 将(18)式转换为(19)式
-x1, 0.5, Δ), 将(18)式转换为(19)式
 (19)
(19)
令ei=xi- , 得到ESO估计误差为
, 得到ESO估计误差为
 (20)
(20)
再令εi= , 即ε1=e1, ε2=
, 即ε1=e1, ε2= , (20)式改写为
, (20)式改写为
 (21)
(21)
由(16)~(17)式和(19)式可得基于ADRC控制律的滚转角速度闭环系统表示为
 (22)
(22)
式中, v=(v1, v2)T是跟踪微分器(14)式的解, x=(x1)是系统的状态,  是ESO的状态, ϕ(v-
是ESO的状态, ϕ(v- )=kfal(v1-
)=kfal(v1- , 0.5, Δ)。
, 0.5, Δ)。
引理1[19] 若(17)式中函数fp对其所有自变量均是连续可微的,  有界, 扰动fp、系统输入δa与状态p均有界, 则(18)式所示滚转角速度ESO的跟踪误差满足
有界, 扰动fp、系统输入δa与状态p均有界, 则(18)式所示滚转角速度ESO的跟踪误差满足
 (23)
(23)
式中,  为ESO观测值, Γ1为与ω无关的常数。
为ESO观测值, Γ1为与ω无关的常数。
证明 对于(12)式所示滚转角速度回路总扰动fp=fp(t, x1, x2), 首先有
 (24)
(24)
由(12)式知, 飞机各状态及气动力、气动力矩均处于常规飞行包线内, 因此fp有界且连续可微, 系统输入δa和状态p均有界, 因此存在M>0使得 在区间[0, ∞)一致成立。令矩阵
在区间[0, ∞)一致成立。令矩阵
 (25)
(25)
显然矩阵E是Hurwitz的, 再令正定矩阵P是Lyapunov方程PE+ETP=-I的解, 定义函数V1, W1: R2→R为
 (26)
(26)
那么有
(27)
式中: λmax(P)和λmin(P)分别表示矩阵P的最大特征值和最小特征值; ||·||指R2中的欧几里德范数。
记ε=(ε1, ε2)T, 计算V1(ε(t))沿(21)式关于t的导数为
 (28)
(28)
于是有
 (29)
(29)
求解(29)式所示的微分方程得
 (30)
(30)
再由(27)式, 有
 (31)
(31)
结合εi= , 可得
, 可得
 (32)
(32)
于是可以得出
 (33)
(33)
即
 (34)
(34)
证明完毕。
由(33)式可知, 本文设计的ADRC控制律中, (18)式所示的滚转角速度ESO能够较好地观测出系统状态和总扰动。
引理2[19] 若引理1成立, ϕ是Lipschitz连续的, 则存在tω>0, 使得对任意的t>tω, (22)式所示滚转角速度ADRC闭环系统的跟踪误差满足
 (35)
(35)
式中, pcmd*为经过(14)式所示的TD过渡后的滚转角速度指令, Γ为与ω无关的常数。
证明 定义系统状态对指令信号的跟踪误差ηi=vi-xi, i=1, 即η1=v1-x1, 结合(22)式可得误差系统
 (36)
(36)
已知ϕ(v- )=kfal(v1-
)=kfal(v1- , 0.5, Δ), 由fal(·)函数的性质可以得出ϕ(v-
, 0.5, Δ), 由fal(·)函数的性质可以得出ϕ(v- )是Lipschitz连续的, 其Lipschitz常数为Li, 因此有
)是Lipschitz连续的, 其Lipschitz常数为Li, 因此有
 (37)
(37)
则有
 (38)
(38)
令k < 0, 再令正定矩阵Pk是Lyapunov方程Pkk+kTPk=-I的解, 定义正定函数V2, W2: R→R为
 (39)
(39)
那么有
 (40)
(40)
计算Lyapunov函数V2沿(36)式关于时间t的导数, 并结合(34)式可得
 (41)
(41)
记N0= , 则有
, 则有
 (42)
(42)
求解(42)式所示的微分方程得出,存在t2ω>0, 当t>t2ω时
 (43)
(43)
将(43)和(40)式结合可推出, 当t>t2ω时
 (44)
(44)
由于不等式(44)中括号内第一项在t→∞时趋近于0, 中括号内第二项不超过 乘以一个与ω无关的常数, 从而存在tω>t2ω以及常数Γ>0, 使得∀t>tω都有|x1(t)-v1(t)≤
乘以一个与ω无关的常数, 从而存在tω>t2ω以及常数Γ>0, 使得∀t>tω都有|x1(t)-v1(t)≤ 。证明完毕。
。证明完毕。
因此, 由引理2可知, 本文设计的ADRC闭环系统如(22)式所示满足
 (45)
(45)
即
 (46)
(46)
(46) 式证明了本文ADRC闭环系统的收敛性, 也就是说, 在ADRC控制律的作用下, 变体飞机的滚转角速度能够准确地跟踪上滚转角速度指令。
4 仿真分析
本节采用Matlab/simulink对基于自抗扰控制方法的机动飞行控制律的控制性能和鲁棒性进行验证分析。
仿真中飞机配平状态为H=1 000 m, V=40 m/s, α=θ=4.21°, δe=0.18°, 后掠角20°以及推力T=18.89 N, 其余状态和舵面偏转均为0。选取上半滚倒转机动进行验证, 角速度ADRC控制律主要参数如表 2所示。
系统采样步长为Ts=0.02 s。采用一阶惯性环节来模拟操纵面的执行机构, 操纵面的偏转范围与速率限制如表 3所示。
角速度ADRC控制律仿真参数
操纵面限制
4.1 机动动作设计
上半滚倒转机动是一种常用于脱离空战时的机动动作, 同时它也是一个能够在空战中防止后方敌机雷达锁定的有效战术, 具有实战意义。因此,本文选择该机动来验证提出的基于自抗扰控制的变体飞机机动控制方法。
在进行机动时, 飞机首先拉杆抬头, 当机腹朝上时再横滚半圈, 最终以反方向平飞改出, 其机动过程中各物理量变化情况如图 3所示, 表 4给出了上半滚倒转机动的流程,表中p, q单位为(°)/s。
由图 3和表 4可知, 完成上半滚倒转机动需要对飞机的俯仰角速度和滚转角速度进行控制, 因此飞机的俯仰和滚转性能决定了上半滚倒转机动的效果。变体飞机可以通过改变气动外形来改善俯仰和滚转性能, 获得更好的机动效果, 也就是说必须考虑飞机变体带来的舵效变化。舵效一般用力矩系数对舵面偏转角的导数来表示, 分别用Cmδe, Clδa来表示升降舵、副翼的舵效。图 4~5给出了本文所用变体飞机在高度H=1 000 m、速度V=40 m/s时升降舵舵效和副翼舵效随后掠角和迎角变化的曲线。从图中可以看出, 当迎角大于5°时, 后掠角度数越大, 升降舵舵效也越大; 副翼舵效则随后掠角的增大而减小。因此, 想要在上半滚倒转机动中通过变体获得更好的机动性能, 可以在前半段拉起阶段令后掠角变为最大, 以获得更好的俯仰操纵性, 在后半段滚转阶段令后掠角变为最小, 以获得更好的滚转操纵性。
 |
图3 上半滚倒转机动物理量变化过程 |
上半滚倒转机动流程
 |
图4 升降舵舵效 |
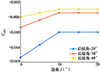 |
图5 副翼舵效 |
4.2 仿真结果对比
为验证飞机变体对机动性能的提升效果和ADRC控制方法的性能, 仿真在机动的同时改变飞机的构型, 将变体时的PID(proportional-integral-derivative)控制、ADRC控制与未变体时的PID控制、NDI(nonlinear dynamic inversion)控制、ADRC进行对比。初始后掠角为20°, 在仿真第1秒以12°/s的速率变化到68°, 在第8秒以相同的速率从68°变回20°, 其后掠角变化曲线如图 6所示。飞机于第5秒开始机动, 在第2秒将静稳定性导数Clβ, Cmα和Cnβ同时减小30%。仿真结果如图 7~13所示。
从图 7三维轨迹图可以看出, 在后掠角固定为20°的情况下, 当飞机参数受到扰动时, NDI无法完成机动, 而PID与ADRC都能够完成机动, 但由于图 12中升降舵偏转达到饱和, 导致图 8中对俯仰角速度的控制效果并不是很理想。当变体与参数扰动同时存在时, PID与ADRC均能完成机动, 但PID的控制性能明显因受到变体的影响而下降。在对俯仰角速度控制时, 如图 8所示, 变体PID曲线对指令的跟踪精度变差, 存在较大跟踪误差, 而变体ADRC曲线既无超调也无跟踪误差。在对滚转角速度控制时, 如图 9所示, 变体PID曲线出现较大超调, 约为16.67%, 而变体ADRC曲线仅有4.67%的超调量, 属于可接受的范围。
对比未变体与变体ADRC的仿真结果, 飞机后掠角为20°时, 图 12中未变体ADRC曲线在机动拉起过程升降舵已经达到饱和状态, 此时升降舵已经没有了控制裕度, 对俯仰角速度的控制效果并不理想; 而当飞机后掠角变为68°进行机动时, 升降舵的舵效增大, 使得图 12中变体ADRC曲线升降舵的出舵量减小了。经过变体之后, 升降舵不仅保留有5°左右的控制裕度, 在图 8变体ADRC曲线中可以看出, 还提高了俯仰角速度的控制精度。也就是说, 相同出舵量下, 68°后掠角能产生更大的俯仰角速度, 即机动性能更好, 这与4.1节的分析结果相符。
综上所述, ADRC控制器能够克服变体带来的气动参数变化以及外界参数扰动, 保证变体与扰动下角速度的性能, 并很好地完成机动。而变体飞机采用变后掠翼进行辅助能够使飞机拥有更好的操纵性能和机动能力,同时保证控制舵面不会饱和, 甚至增加舵面的控制裕度, 这是相较于不加变后掠翼的优势所在, 在实际空战中具有较大的实用意义。从整体上来看, 基于自抗扰控制的变体飞机角速度控制器控制精度高、响应速度快、鲁棒性强。
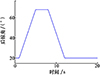 |
图6 后掠角变化曲线 |
 |
图7 上半滚倒转机动三维轨迹图 |
 |
图8 俯仰角速度响应曲线 |
 |
图9 滚转角速度响应曲线 |
 |
图10 俯仰角变化曲线 |
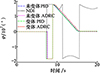 |
图11 滚转角变化曲线 |
 |
图12 升降舵偏转曲线 |
 |
图13 副翼偏转曲线 |
5 结论
本文考虑变体飞机机动飞行控制问题。以变后掠翼飞机为研究对象, 针对变体带来的模型不确定性与机动过程中的参数扰动问题, 采用自抗扰控制技术设计飞机的三轴角速度控制律, 以消除变体带来的模型不确定性和机动过程中的参数扰动, 从而提高系统鲁棒性。设计了上半滚倒转机动动作, 并在机动过程中加入变体构型变化, 通过变体提高飞机的机动性能。仿真结果表明, 本文提出的基于自抗扰控制的变体飞机机动控制方法是有效的, 能够消除变体带来参数变化、机动过程中模型不确定性和外界扰动的影响, 具有令人满意的控制性能。
References
- ZHANG Yibo, LIU Mudong, XIONG Junjiang. Morphing aircraft technology[J]. Aeronautical Science & Technology, 2013(6): 64–68 (in Chinese) [Google Scholar]
- LEE J, KIM S H, JUNG S, et al. Linear parameter-varying control of variable span-sweep morphing aircraft[C]//AIAA Scitech 2019 Forum, 2019 [Google Scholar]
- GUO Jianguo, WU Linxu, ZHOU Jun. Compound control system design for asymmetric morphing-wing aircraft[J]. Journal of Astronautics, 2018, 39(1): 52–59 (in Chinese) [Google Scholar]
- QIAO Fuxiang, SHI Jingping, ZHANG Weiguo, et al. A high precision adaptive back-stepping control method for morphing aircraft based on RBFNN method[J]. Journal of Northwestern Polytechnical University, 2020, 38(3): 540–549 [Article] (in Chinese) [CrossRef] [EDP Sciences] [Google Scholar]
- LIANG X, WANG Q, XU B, et al. Back-stepping fault-tolerant control for morphing aircraft based on fixed-time observer[J]. International Journal of Control, Automation and Systems, 2021, 19(12): 3924–3936 [Article] [CrossRef] [Google Scholar]
- XU Wenfeng, LI Yinghui, PEI Binbin, et al. Coordinated optimization control of morphing aircraft based on multi-model MPC[J]. Systems Engineering and Electronics, 2023, 45(9): 2902–2911 (in Chinese) [Google Scholar]
- MING Ruichen, LIU Xiaoxiong, WANG Lei. Research on trajectory tracking control method of a morphing aircraft[J]. Aeronautical Science & Technology, 2023, 34(10): 35–41 (in Chinese) [Google Scholar]
- HAN Jingqing. Active disturbance rejection control technique——the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008 (in Chinese) [Google Scholar]
- HAN J. From PID to active disturbance rejection control[J]. IEEE Trans on Industrial Electronics, 2009, 56(3): 900–906 [Article] [CrossRef] [Google Scholar]
- GAO Zhiqiang. On the foundation of active disturbance rejection control[J]. Control Theory & Applications, 2013, 30(12): 1498–1510 (in Chinese) [Google Scholar]
- JIN H, GAO Z. On the notions of normality, locality, and operational stability in ADRC[J]. Control Theory and Technology, 2023, 21: 97–109 [Article] [CrossRef] [Google Scholar]
- ZHANG Zhao, YANG Zhong, DUAN Yuxiao, et al. Active disturbance rejection control method for actively deformable quadrotor[J]. Control Theory & Applications, 2021, 38(4): 444–456 (in Chinese) [Google Scholar]
- LU Kaiwen, YANG Zhong, ZHANG Qiuyan, et al. Active disturbance rejection flight control method for thrust-vectored quadrotor with tiltable rotors[J]. Control Theory & Applications, 2020, 37(6): 1377–1387 (in Chinese) [Google Scholar]
- MENG Zhipeng, YANG Liuqing, WANG Bo, et al. ADRC controller design for folding wing vehicle based on improved equilibrium optimization[J/OL]. (2022-09-21)[2023-11-04]. [Article] (in Chinese) [Google Scholar]
- CHEN Sen, XUE Wenchao, HUANG Yi. Active disturbance rejection control and control allocation for thrust-vectored aircraft[J]. Control Theory & Applications, 2018, 35(11): 1591–1600 (in Chinese) [Google Scholar]
- LIU Junjie, CHEN Zengqiang, SUN Mingwei, et al.. Application of active disturbance rejection control in high-angle-of-attack maneuver for aircraft with thrust vector[J]. Chinese Journal of Engineering, 2019, 41(9): 1187–1193 (in Chinese) [Google Scholar]
- SEIGLER T M, NEAL D A, BAE J S, et al. Modeling and flight control of large-scale morphing aircraft[J]. Journal of Aircraft, 2007, 44(4): 1077–1087 [CrossRef] [Google Scholar]
- CHEN Wei. Modeling analysis and adaptive flight control law design of morphing aircraft[D]. Xi'an: Northwestern Polytechnical University, 2014: 23–29 (in Chinese) [Google Scholar]
- ZHAO Zhiliang. Convergence of nonlinear active disturbance rejection control[D]. Hefei: University of Science and Technology of China, 2012: 57–60 (in Chinese) [Google Scholar]
All Tables
All Figures
|
图1 不同构型下的变后掠翼飞机 |
| In the text | |
|
图2 变体飞机角速度ADRC控制律整体结构图 |
| In the text | |
|
图3 上半滚倒转机动物理量变化过程 |
| In the text | |
|
图4 升降舵舵效 |
| In the text | |
|
图5 副翼舵效 |
| In the text | |
|
图6 后掠角变化曲线 |
| In the text | |
|
图7 上半滚倒转机动三维轨迹图 |
| In the text | |
|
图8 俯仰角速度响应曲线 |
| In the text | |
|
图9 滚转角速度响应曲线 |
| In the text | |
|
图10 俯仰角变化曲线 |
| In the text | |
|
图11 滚转角变化曲线 |
| In the text | |
|
图12 升降舵偏转曲线 |
| In the text | |
|
图13 副翼偏转曲线 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.