| Issue |
JNWPU
Volume 43, Number 3, June 2025
|
|
|---|---|---|
| Page(s) | 574 - 581 | |
| DOI | https://doi.org/10.1051/jnwpu/20254330574 | |
| Published online | 11 August 2025 | |
Feedforward-feedback compound control method and application for flow field in 2 meter high-speed free jet wind tunnel
2 m高速自由射流风洞流场前馈-反馈复合控制方法研究与应用
China Aerodynamics Research and Development Center, Mianyang 621000, China
Received:
13
May
2024
Abstract
The 2 meter high-speed free jet wind tunnel is the first large-scale open jet wind tunnel with Mach number covering sub-span and super-span flow in China. There are two difficulties in the flow field control of the wind tunnel: Firstly, the wind tunnel flow field itself has the characteristics of large hysteresis and strong nonlinearity, which increases the difficulty of flow field control; Secondly, the flow field will be strongly and continuously disturbed during the wind tunnel operation, which requires the control system to have fast anti-interference ability. To solve the above problems, a feedforward-feedback compound control method of flow field is proposed in this paper. The feedforward control is based on the principle of flow conservation, which establishes the function relation of total pressure, air source pressure, Mach number and pressure regulating valve opening, so as to obtain the feedforward control law to quickly suppress the external interference of flow field, and the feedback control is based on variable gain PI control to further improve the steady-state control accuracy of flow field. By adopting the compound control strategy, the problem of high-precision control of wind tunnel flow field in the presence of various external disturbances has been successfully solved, and the unique flow field control requirements such as supersonic continuous variable Mach number in the wind tunnel have been realized.
摘要
2 m高速自由射流风洞是我国首座马赫数涵盖亚跨超的大型开口式射流风洞。该风洞在流场控制上存在2个难点: ①风洞流场本身具有大滞后性和强非线性特点, 增大了流场控制难度; ②风洞运行过程中流场会受到强烈的、持续性的干扰, 要求控制系统具有快速的抗干扰能力。针对上述问题, 基于流量守恒原理建立了调压阀开度关于气源压力、总压、马赫数的多变量阀门特性函数, 在此基础上形成前馈控制率, 结合变增益比例积分(proportional integral, PI)控制, 构成了流场前馈-反馈复合控制策略, 成功解决了在多种外部干扰存在的情况下风洞流场高精度控制难题, 同时实现了该风洞超声速连续变马赫数等独特的流场控制需求。
Key words: feedforward-feedback compound control / flow field control / valve characteristics / flow conservation / modeling / supersonic continuous variable Mach number
关键字 : 前馈-反馈复合控制 / 流场控制 / 阀门特性 / 流量守恒 / 建模 / 超声速连续变马赫数
© 2025 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
2 m高速自由射流风洞(以下简称为2 m射流风洞)是国内唯一一座2 m量级自由射流风洞, 该风洞采用“直流下吹”结合“排气引射”的总体布局方案, 风洞结构本体包括3级阀门系统、稳定段、喷管段、试验舱、引射器、消声塔等[1]。风洞采用下吹式和下吹引射式2种运行方式, 通过控制进气调压阀开度对稳定段总压进行调节。该风洞独特的结构形式和运行需求给流场控制带来了显著挑战:
1) 流场具有强非线性、大滞后性特点。2 m射流风洞流场非线性主要表现为调压阀开度对流场参数的影响呈非线性关系, 而风洞单次试验调压阀开度变化范围宽, 非线性影响大, 对控制参数的适应性提出了更高的要求。另一方面, 较传统小尺寸闭口风洞而言, 该风洞稳定段容积显著增大, 并且流场调节机构与流场参数反馈检测点距离延长, 使得风洞流场大滞后特性突出, 流场控制系统容易振荡。
2) 流场系统存在多源时变干扰。2 m射流风洞运行过程中耗气量巨大, 造成气源压力迅速下降。另外, 超声速连续变马赫数运行时, 喷管喉道截面积会发生变化。上述2个干扰源是该风洞主要的时变干扰源。
3) 总压跟随控制问题。2 m射流风在超声速连续变马赫数运行时, 为了降低风洞能耗、改善流场品质, 需采用总压马赫数匹配的流场控制方式, 即总压跟随控制问题。风洞流场控制是典型的过程控制, 流场本身具有大滞后性和大惯性, 它难以像运动伺服控制那样, 能够准确地跟随控制目标。
传统风洞流场控制通常采用以PI控制为主的反馈控制[2-6],总是基于对被控对象的控制偏差确定相应补偿量, 难以满足时滞特性显著、多源干扰耦合强烈的2 m射流风洞流场控制需求。针对这一问题, 创新地引入前馈控制[7-9], 联合基于变增益PI控制的反馈控制, 设计了流场前馈-反馈复合控制系统。通过前馈控制, 一方面快速抑制各类多源耦合干扰所造成的总压非期望波动, 另一方面也可实现总压快速跟随目标变化, 使得流场处于“近似动态平衡”状态, 进而由PI反馈控制实现对流场的高精度控制。西北工业大学学报第43卷第3期刘为杰, 等:2 m高速自由射流风洞流场前馈-反馈复合控制方法研究与应用
1 PI反馈控制抗干扰性能分析
基于经典的PI控制及其改进的各型PI控制是目前风洞流场控制中最为常用的控制方法, 其控制原理图如图 1所示, 图中符号s表示复频域, R(s)为目标值, Y(s)为被控量(总压或马赫数), G(s)为流场模型, D(s)为外部扰动。
 |
图1 PI控制原理图 |
则控制误差可表示为
 (1)
(1)
当干扰是非时变干扰时, 不失一般性, 令干扰为单位阶跃信号, 则D(s)=1/s, 根据终值定理
 (2)
(2)
可见, 当系统存在非时变干扰时, PI控制也能够实现零误差控制。
当干扰是时变干扰时, 不失一般性, 令干扰为单位斜坡信号, 则D(s)=1/s2, 此时控制系统的稳态误差为
 (3)
(3)
可见, 对于时变干扰, PI控制不能实现零误差控制。(3)式表明, 增大积分系数可以降低稳态误差, 但是积分系数过大, 系统容易振荡, 一般积分系数取值不宜过大。因此, 单一的PI控制难以抑制流场中的时变干扰。
图 2是2 m射流风洞某次吹风试验总压实际控制曲线, 试验工况为马赫数1.5、总压183 kPa。从图 2中可以看出, 在10 s左右风洞充压完成后投入PI闭环控制, 总压控制偏差较大, 且偏差有增大趋势。30 s左右, 增大PI控制参数, 总压控制偏差略有减小, 继续增大PI控制参数后, 总压出现振荡。
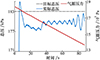 |
图2 采用PI控制时总压控制曲线 |
吹风试验结果和理论分析一致: 当存在气源压力下降等时变干扰情况下, 单独采用PI控制, 总压难以准确跟踪目标值, 存在控制偏差。上述理论分析与试验结果表明: 在PI反馈控制的基础上引入前馈控制十分必要。
2 前馈控制模型
前馈控制可以根据干扰量或者控制目标的变化按照事先确定的规律控制调节机构动作, 它与被控量没有直接关联, 不用等待被控变量产生变化时才进行调节, 因此与反馈控制相比, 前馈控制是抑制干扰和实现快速跟随的有效手段[10-14]。前馈控制的关键部分在于前馈控制模型, 通过前馈控制模型可以预测执行机构的动作规律。对于2 m射流风洞而言, 调压阀作为流场调节的唯一执行机构, 前馈控制模型即是调压阀阀门特性函数。气源压力pg、目标马赫数Ma*以及目标总压p0*, 这些都是阀门特性函数的输入, 调压阀开度l是阀门特性函数的输出, 因此阀门特性函数可表示为
 (4)
(4)
上述函数的3个输入量本质上都与风洞气流流量相关, 其中气源压力pg影响风洞进气流量, 目标总压p0*和目标马赫数Ma*影响风洞稳定段排气流量。当风洞流场建立后, 在变总压过程中任意时刻, 可认为流场是暂态平衡的, 即风洞流量守恒, 此时风洞进气和排气流量近似相等。根据上述原则可以获得(4)式的函数表达式, 下文将给出具体推导过程中。
调压阀的流量可近似按照(5)式计算[15]
 (5)
(5)
式中: Gv为调压阀的流量, kg/s; T为气流总温, K; pg为气源压力, Pa; q(λ)为流量函数。当气流通过调压型面流道速度达到声速时, 称之为临界状态, 此时q(λ)为1, 调压阀运行过程中绝大部分时间是处于临界状态; Av(l)为调压阀的流通面积, 是调压阀开度l的函数, 该函数可根据调压阀的具体设计参数获得。
试验段的稳态流量计算如(6)式所示。
 (6)
(6)
式中:Gw为试验段出口截面流量, kg/s; Aw为试验段出口截面积;\begin{document}$q(\lambda)=\left(\frac{\gamma+1}{2}\right)^{\frac{1}{\gamma-1}} \lambda\left(1-\frac{\gamma-1}{\gamma+1} \lambda^2\right)^{\frac{1}{\gamma-1}}$\end{document};\begin{document}$\lambda=\sqrt{\frac{1.2 M a^{* 2}}{1+0.2 M a^{* 2}}}$\end{document};γ=1.4。超声速时喷管名义马赫数Ma′和目标马赫数Ma*近似相等, 可用Ma′代替Ma*进行计算。
联立公式(5)~(6), 可计算出
 (7)
(7)
高速自由射流风洞调压阀采用“修正指数特性”曲线作为调压型面, 前段采用指数特性方程, 尾段采用直线过渡[16], 其几何特性见图 3。
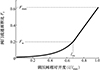 |
图3 调压阀几何特性曲线 |
通过(6)式获取阀门流通面积后, 可反算其开度l, l的计算公式为
 (8)
(8)
式中: Fmin为阀门流通面积最小面积比; Fmax为阀门流通面积最大面积比; Fw为阀门修正指数特性曲线转折点位置处的面积比; lmax为阀门的最大开度, mm; lrw为阀门修正指数特性曲线转折点, 上述参数均已知。
Fr为调压阀面积比
 (9)
(9)
式中,Av max为阀门的最大流通面积, m2。
联立(7)~(9)式即可获得调压阀阀门特性函数, 根据阀门特性函数可以计算出任意试验条件下调压阀的理论开度。
3 前馈-反馈复合控制系统设计
上文建立的2 m射流风洞前馈模型包含了3种时变干扰, 因此针对3种时变干扰, 可用统一的公式计算前馈控制量。前馈控制采用增量式结构, 控制器根据扰动的变化量进行补偿, 其好处是可以消除建模的系统偏差。采用计算机离散控制, 前馈控制量可按照(10)式计算。
 (10)
(10)
式中: k为表示当前控制周期; k-1为上一个控制周期; uF为前馈控制量。ΔuF为相邻2个控制周期前馈控制量增量。
反馈控制采用变增益增量式PI控制,其表达式为
 (11)
(11)
式中: e为总压跟随误差; uPI为反馈控制量。ΔuPI为相邻2个控制周期反馈控制量增量;kP为比例系数; kI为积分系数;kP和kI根据e的范围进行增益调度, 在大误差时保持较低增益, 小误差时变化到较高增益, 避免总压发生振荡。
本文所提出的复合控制原理图见图 4, 复合控制量可表示为
 (12)
(12)
 |
图4 前馈-反馈复合控制原理图 |
前馈控制针对气源压力下降、喷管型面变化和总压控制目标变化, 对调压阀开度进行了补偿, 使得总压控制误差维持在较小的范围内, 而PI反馈控制则进一步减小总压控制误差, 两者结合起来构成复合控制, 流场能够得到较好的控制精度。在控制参数整定方面, 前馈控制无需整定控制参数, 因此非常便于工程实施, 而PI控制只需应对小的控制误差, 可适当减小其增益, 避免总压振荡, 这样一套控制参数可以适应多种试验工况, 显著降低了PI控制器参数调整难度。
4 流场控制建模仿真分析
考虑到2 m射流风洞流场控制的复杂性和调试运行成本, 为有效降低调试风险, 尽可能减少调试车次, 预先通过建模仿真的手段对流场控制策略进行仿真分析。风洞本体及其众多附属设备对流场控制都有影响, 但是仿真建模时不可能将其全部涵盖, 选取其中对风洞流场控制有较大影响部分进行建模, 在保证所建模型符合实际规律的情况下, 可以有效降低建模难度, 建模范围包含气源、调压阀、稳定段、喷管段。假设管道气流为一维均匀流, 气体参数仅沿轴向变化, 流动过程总压损失为零, 将气流流经风洞各部段简化为“进气-压力容腔-排气”模型, 按可压缩气体阻塞或非阻塞流流量公式计算各部段流量, 根据压力容腔连续方程, 可计算容器内部的气体压强。基于Matlab/Simulink平台搭建了2 m射流风洞流场控制仿真模型, 如图 5所示。以流场控制难度最大的超声速变总压连续变马赫数试验作为案例进行仿真分析, 仿真条件: 气源初始压力1 800 kPa, 马赫数变化范围2.5~3.0, 总压变化范围(455~730)kPa。为了进行对比, 流场控制算法分别采用PI控制和前馈-反馈复合控制。风洞运行过程分为充压启动阶段和流场闭环控制阶段。充压启动阶段, 调压阀打开至预置开度, 气流进入稳定段, 总压快速升高。风洞充压启动完成后, 进入流场闭环控制阶段。本文后续所述的调压阀开度皆指在预置开度基础上的变化量, 即不包含预置开度。图 6分别给出了PI控制和前馈-反馈复合控制作用下流场控制仿真结果。图 6a)中, 采用PI控制时, 总压跟随精度约为0.5%, 而采用复合控制策略, 总压跟随精度优于0.3%。图 6b)中, 在连续变马赫数过程中, 复合控制输出的调压阀开度指令要超前于PI控制, 这也是复合控制的总压跟随精度优于PI控制的原因。此外, 复合控制中, 前馈控制输出占主导部分, 表明前馈控制针对气源压力下降、喷管型面变化和总压控制目标变化等对阀门开度的补偿是有效的。
 |
图5 高速自由射流风洞流场控制仿真模型 |
 |
图6 超声速连续变马赫数流场控制仿真结果 |
5 复合控制实际应用效果
复合控制策略对于2 m射流风洞所有的试验工况均适用, 下面注重介绍3种典型的试验工况,对控制效果进行说明。
1) 定总压控制。定总压控制工况下, 流场受到的主要时变干扰源为气源压力下降。从前文分析和试验结果可知, 如果单独采用PI控制, 总压控制精度难以满足要求。图 7给出了2 m射流风洞某次超声速试验曲线, 试验工况为: 马赫数1.5、总压183 kPa。图 7a)表明, 采用复合控制后, 总压很快稳定并且达到了较高的控制精度。图 7b)控制输出曲线中, PI控制输出量较小, 前馈控制量随着气源下降不断增大, 说明前馈控制在抑制气源下降干扰方面起到主要作用。
 |
图7 定总压流场控制曲线 |
2) 超声速定总压变马赫数控制。超声速连续变马赫数是2 m射流风洞一项特殊的试验技术。该试验工况下, 流场受到的主要时变干扰源有2个: 气源压力变化和喷管名义马赫数变化。这2个时变干扰对流场的作用效果是相反的, 前者有使总压下降的趋势, 后者有使总压升高的趋势(喷管名义马赫数从低马赫数变高马赫数)。图 8给出了马赫数Ma=2.2~2.3, 总压363 kPa的试验曲线。图 8a)中喷管型面变化瞬间, 总压有所波动, 但是在复合控制器的作用下, 总压快速恢复稳定。图 8b)中在喷管型面保持不变的时候, 前馈控制量随气源下降而增大, 当喷管型面从低马赫数到高马赫数变换时, 为了抑制总压的上升, 前馈控量随喷管型面变化而减小, 前馈控制在抑制干扰方面起到主要作用。
 |
图8 超声速定总压连续变马赫数流场控制曲线 |
3) 超声速变总压变马赫数控制。该试验工况下, 流场受到的主要时变干扰源有3个: 气源压力下降、喷管型面变化以及总压控制目标的变化。与定总压控制相比, 变总压控制的难点是需要风洞实际总压跟随的给定目标总压曲线。
图 9给出了马赫数Ma=2.5~3.0, 总压(455~730)kPa的试验曲线。图 9a)中目标总压是一个非线性曲线, 实际总压跟随控制达到了极高的跟随精度(优于0.3%)。图 9b) 在变总压和变马赫数控制过程中, 前馈控制量占主要部分, 而PI控制变化微小, 再一次验证了前馈控制在抑制时变干扰中的主导作用。
 |
图9 超声速变总压连续变马赫数流场控制曲线 |
得益于前馈-反馈复合控制的运用, 成功解决了2 m射流风洞在多种干扰存在情况下流场精确控制的难题, 使流场控制精度均达到了风洞设计要求(亚跨声速马赫数控制精度0.003, 超声速稳定段总压控制精度常压试验0.2%, 降速压试验0.5%)。另一方面, 由于前馈控制可以消除大部分流场外部干扰, PI控制的负担显著减轻, 因此PI控制采用相对保守的控制参数即可满足流场控制需求, 一套PI控制参数适用于多种不同的试验工况, 流场控制参数调试车次随之大幅度降低。
6 结论
1) 基于流量守恒理论, 建立了调压阀的多变量阀门特性函数, 避免了在不同试验马赫数、不同气源压力等风洞运行状态下开展大量车次的风洞调试试验, 极大节约了风洞调试能耗和时间成本。阀门特性函数将气源压力、目标总压、马赫数等试验条件和外部因素纳入风洞流场控制系统中, 显著提高了流场控制精度与抗干扰能力。
2) 提出了前馈-反馈复合控制策略。其中前馈控制基于阀门特性函数, 可以有效抑制气源压力下降、喷管型面变化等对总压控制带来的干扰, 反馈控制则进一步缩小流场控制误差。复合控制策略使得流场控制达到了很高的控制精度, 也使得2 m自由射流风洞在国内首次成功开展超声速连续变马赫数试验。值得注意的是该复合控制策略对于跨声速试验中马赫数控制同样有效, 只需要将名义马赫数替换为跨声速目标马赫数即可。复合控制策略已经经过2 m自由射流风洞近千次风洞试验的检验, 表现出了良好的、可靠的控制性能。
3) 本文提出的调压阀阀门特性函数建立方法以及前馈-反馈复合控制策略同样适用于其他暂冲式风洞, 可以推广使用, 为暂冲式风洞流场控制提供了一种新的技术路径。
References
- TIAN J Y, LING Z W, LIU W J, et al. Flow field control for 2-meter high-speed free-jet wind tunnel[J]. Chinese Journal of Aeronautics, 2023, 36(10): 77–89 [Google Scholar]
- LI Zhuangsheng, YANG Pengcheng, CHEN Dan, et al. The designer of total pressure control strategy for 0.6 m continuous transonic wind tunnel[J]. Journal of Experiments in Fliud Mechanics, 2016, 30(4): 88–92 (in Chinese) [Google Scholar]
- CHEN Dan, WANG Zhong, LU Xiang, et al. The control system design and study for continuous supersonic wind tunnel[J]. Journal of Northwestern Polytechnical University, 2022, 40(1): 168–172. [Article] (in Chinese) [Google Scholar]
- NI Wenbin, DONG Jingang, LIU Shuwei, et al. Application of PID based on adaptive genetic algorithms in wind velocity control system of wind tunels[J]. Journal of Experiments in Fliud Mechanics, 2015, 29(5): 84–89 (in Chinese) [Google Scholar]
- RUI Wei, YI Fan, DU Ning, et al. Study on flow field control technique of flutter test in 2.4 m transonic wind tunnel[J]. Journal of Experiments in Fliud Mechanics, 2012, 26(6): 83–86. [Article] (in Chinese) [Google Scholar]
- CHEN Dan, ZHANG Yongshuang, LI Gang, et al. A design of total pressure control method for continuous transonic wind tunnel[J]. Journal of Experiments in Fliud Mechanics, 2019, 33(6): 65–71 (in Chinese) [Google Scholar]
- FU Meng, LI Jianghong, WU Yafeng, et al. State feedback and torque feed forward combined control system for suppressing drill-strings stick-slip vibration[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 292–298. [Article] (in Chinese) [Google Scholar]
- WANG Shixin, CAO Xin, QIAN Shengnan, et al. A load current feedforward control strategy for virtual synchronous rectifier[J]. Power Electronics, 2025, 59(3): 1–4. [Article] (in Chinese) [Google Scholar]
- DONG Fengbin, WU Ao. A current feed forward control algorithm for three-phase voltage source inverter[J]. Control Engineering of China, 2023, 30(6): 1018–1022 (in Chinese) [Google Scholar]
- HUANG Dexian, WANG Jingchun, JIN Yihui, et al. Process control system[M]. 2nd edition. Beijing: Tsinghua University Press, 2011: 179–190 (in Chinese) [Google Scholar]
- WANG Shuqing, LE Jiaqian. Handbook of automation and instrument engineers[M]. Beijing: Chemical Industry Press, 2010 (in Chinese) [Google Scholar]
- ZOU Min, WEN Dingdu, HE Zongqing, et al. Fuzzy PI permanent magnet syn-chronous motor speed control system based on feedforward compensation[J]. Journal of Hunan University of Technology, 2019, 33(3): 35–40 (in Chinese) [Google Scholar]
- YUE Yongkai. Research and application of incremental control for quadrotor UAV to reject disturbance[D]. Xi'an: Xidian University, 2021 (in Chinese) [Google Scholar]
- HU Huanyi, CAI Changxin, CHEN Yongjun, et al. Researchon permanent magnet syn-chronous motor vector control based on load feedforward compensation[J]. Micromotors, 2021, 54(1): 89–93 (in Chinese) [Google Scholar]
- ZHANG Yi. Development and characteristic study about pressure-regulating valve of intermittent wind tunnel[D]. Chongqing: Chongqing University, 2019 (in Chinese) [Google Scholar]
- HUANG Zhilong, XU Dachuan, ZHANG Guobiao. Aerodynamic design and characteristic test of large intermittent wind tunnel control value[J]. Journal of Experiments in Fliud Mechanics, 2012, 26(6): 87–90 (in Chinese) [Google Scholar]
All Figures
|
图1 PI控制原理图 |
| In the text | |
|
图2 采用PI控制时总压控制曲线 |
| In the text | |
|
图3 调压阀几何特性曲线 |
| In the text | |
|
图4 前馈-反馈复合控制原理图 |
| In the text | |
|
图5 高速自由射流风洞流场控制仿真模型 |
| In the text | |
|
图6 超声速连续变马赫数流场控制仿真结果 |
| In the text | |
|
图7 定总压流场控制曲线 |
| In the text | |
|
图8 超声速定总压连续变马赫数流场控制曲线 |
| In the text | |
|
图9 超声速变总压连续变马赫数流场控制曲线 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.