| Issue |
JNWPU
Volume 44, Number 1, February 2026
|
|
|---|---|---|
| Page(s) | 70 - 80 | |
| DOI | https://doi.org/10.1051/jnwpu/20264410070 | |
| Published online | 27 April 2026 | |
Parameter identification method for brushless DC motors of electrical hoist application
电动绞车用无刷直流电机参数辨识方法
School of Automation, Northwestern Polytechnical University, Xi'an 710072, China
Received:
28
April
2025
Abstract
Brushless DC motors (BLDCMs) have been widely adopted across various fields. However, implementing advanced algorithms for high-performance torque control typically relies on accurate mathematical models, requiring precise parameters including inductance, resistance, and back electromotive force (EMF) coefficients. Unlike permanent magnet synchronous motors (PMSMs) that achieve unified mathematical models through coordinate transformation, BLDCMs exhibit distinct mathematical models during commutation and non-commutation phases due to their "three-phase six-step" driving mode. Addressing this challenge, this paper conducts a comprehensive investigation into the mathematical models of BLDCMs across different operational phases and modulation methods, ultimately establishing a unified mathematical framework. Building upon this foundation, a model reference adaptive algorithm-based parameter identification method is proposed. This innovative approach enables offline identification of inductance and resistance parameters, while simultaneously performing online identification of inductance and back EMF coefficients. Experimental results have verified that this method can achieve high identification accuracy for stator inductance, resistance, and back EMF coefficients. Particularly suited for hoist motors requiring frequent start-stop operations, this methodology shows significant practical value in applications demanding robust parameter identification under dynamic operating conditions.
摘要
无刷直流电机在很多领域得到了广泛应用, 而如果要借助先进算法对转矩进行高性能控制, 往往依赖于准确的数学模型, 即需要准确的电感参数、电阻参数以及反电势系数。与永磁同步电机通过坐标轴变换获取统一数学模型不同, 无刷直流电机由于采用"三相六步"驱动模式, 在换相和非换相阶段具有不同的数学模型。针对该问题, 对无刷直流电机在不同阶段以及不同调制方式下的数学模型进行详细研究, 并建立了统一的数学模型, 在此基础上提出了一种基于模型参考自适应算法的参数辨识方法, 该方法可以对电感、电阻进行离线辨识, 对电感和反电势系数进行在线辨识。通过实验验证了该方法可以对定子电感、电阻以及反电势系数获得较高的辨识精度, 非常适合于绞车电机这种需要频繁起停的场景。
Key words: BLDCM / MRAS / parameters identification
关键字 : 无刷直流电机 / 模型参考自适应 / 参数辨识
© 2026 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
无刷直流电机(brushless DC machine, BLDCM)因其功率密度高、效率高、可控性好、控制方法简单、便于维护等诸多优点[1-2]而被广泛应用于各个领域。在航空领域,飞行器正不断朝着多电化甚至全电化的方向发展,航空发动机不再提供液压源,电源系统也由传统的恒频交流模式变为了高压直流或变频交流[3],这使得无刷直流电机,相比于液压马达、异步电机、有刷直流电机等机上传统动力源具有更好的适用性。因此,多电飞机上许多设备如电力作动器、电动油泵以及航空绞车等[4-6]均由BLDCM驱动。
用于驱动绞车的无刷直流电机,通常采用双闭环控制。被控电机的定子等效电阻、定子等效电感以及反电势系数往往影响着电流环控制参数的选择[7],而且一些有效抑制转矩脉动的控制方法[8-9]也依赖于上述参数的准确获取。虽然上述参数可以提前通过外部实验仪器进行离线测量,但随着运行过程中绕组温度的变化,定子电阻和电感参数会发生改变,同时电感以及永磁磁链也会受到电流幅值的影响而改变,因此有必要对无刷电机参数的在线辨识方法开展研究,以期得到更好的转矩控制效果。
参数在线辨识方法在永磁同步电机(permanent magnet synchronous machine, PMSM)的相关研究中较多,如高频注入法、粒子群、最小二乘法、扩展卡尔曼滤波等[10-15]方法。然而上述方法都是基于矢量控制的算法,需要旋变、光电编码器等分辨率较高的位置传感器,且每个开关周期三相导通,而BLDCM的驱动,通常基于霍尔位置传感器采用“三相六步”模式进行调压调速驱动,因此无法直接使用。
与PMSM相比,BLDCM参数辨识的研究相对较少。文献[16]提出了一种改进的滑模观测器实现了对定子反电势、电感以及电阻的观测,文献[17]引入幂次趋近律改善了滑模面切换引起的抖振问题,实现了参数在线辨识。文献[18]提出了一种离散化递推算法同样也实现了反电势的观测。文献[19-20]分别采用改进的粒子群算法和改进鲸鱼优化算法实现了无刷直流电机参数的离线辨识。在文献[21-22]中,都将BLDCM模型视作一个参数未知的三阶传递函数,分别通过遗传算法与Adaptive Tabu Search方法对三阶模型的参数进行辨识。文献[23]通过高频注入结合最小二乘法,实现了对电感和电阻的在线识别,但该方法在注入过程中会引起一定幅度的转矩脉动。在文献[24]中,粒子群优化算法被用于辨识无刷直流电机的转动惯量,结合超螺旋滑膜控制器获得较好的动态性能。
在线辨识的优势在于实时性强,但辨识精度和收敛速度都会随着辨识参数数量的增加而降低。航空绞车电机一般需要频繁起停,且每次运行时间较短,而发热引起的温度变化相对较慢。其中,定子电阻参数的变化主要受损耗发热的影响,因此如果在每次起动之前快速地对电阻进行离线辨识,那么运行过程中只需对电感和反电势进行在线辨识即可,这就需要提高电机运行过程中在线辨识的辨识精度和收敛速度。本文提出了基于模型参考自适应算法的定子参数辨识方法,在每次起动前先对电阻和电感初值进行离线辨识,而在运行过程中则对电感和反电势系数进行实时辨识,从而提高电机参数辨识的精度和速度,实验证明了本文方法的可行性。
1 无刷直流电机数学模型
三相星形连接的无刷直流电机等效电路如图 1所示。图 1中, Q1~Q6为6个功率开关器件,与各自内部集成的反向二极管D1~D6共同组成三相全桥逆变器, 3个桥臂分别与三相绕组连接, 无中线引出。在每个360°的通电周期内, 任何时刻都控制其中两相导通, 每60°电角度进行一次换相, 从而实现“三相六状态”通电模式使电机产生电磁转矩而旋转。图 1中, Udc为直流母线电压, RA, RB, RC和LA, LB, LC分别为A, B, C三相定子绕组的等效电阻与等效电感, 考虑到电机三相对称, 后文中将用R和L分别代表绕组的等效电阻与等效电感。eA, eB, eC为A, B, C三相反电势, iA, iB, iC为A, B, C三相导通电流的正方向。
 |
图1 无刷直流电机三相等效驱动电路 |
按照图 1中的电压和电流方向, 可得三相绕组的电压平衡方程:
 (1)
(1)
式中:UA, UB, UC矩为三相定子绕组电压; UN为中性点电压。定子绕组为星形连接, 因此三相电流满足
 (2)
(2)
将(1)式中的3项相加, 并代入(2)式后可以推导出中性点电压UN为
 (3)
(3)
电机的反电势E可表示为
 (4)
(4)
式中, ω和ke分别为电机的机械角速度和反电势系数。
无刷直流电机通常采用“三相六步”模式驱动, 每过60°电角度, 控制器需要根据转子位置霍尔信号的状态来导通其中的两相绕组。通过对逆变器两相桥臂中的上下2个开关器件进行PWM调制(或者其中的一个开关调制, 另一个保持常通), 即可实现对导通相相电流幅值的控制。图 2列举了2种比较典型单管调制下的导通模式。其中图 2a)为H-PWM-L-ON调制方式, 即只有上桥臂的开关进行调制, 而下桥臂在每个导通周期内常导通, 与之相反的方式为H-ON-L-PWM。图 2b)所示为PWM-ON方式, 每个开关在导通的2个霍尔信号周期内, 前60°电角度为PWM调制, 后60°电角度为常导通, 如果调制和常导通的顺序调换, 就变成了ON-PWM模式。这2种方式的综合运用, 可以将开关损耗所产生的热量更加均匀地分配给6个功率开关器件, 有利于逆变器的均匀散热。然而, 上述4种单管调制方法虽然每个霍尔周期内只对2个导通相的开关进行操作, 但是由于反电势和续流回路的存在, 第三相也会产生电流, 而这种非导通相电流的存在, 会导致数学模型发生变化。
 |
图2 无刷直流电机调制方式 |
以A, B相导通为例, 图 3是单管调制过程中, 导通相电流方向以及可能产生的非导通相电流方向示意图, 上述4种调制模式都能以该图来概括。
图 3a)为上管导通状态时的情况, A, B相电流方向分别如红色实线箭头iA与iB所示。假设这次导通前C相没有电流, 此时有: eA=-eB=E, -E≤eC≤E, UA=Udc, UB=0。由于此时C相为开路状态, 因此中性点电压为UN=(UA-UB)/2+UB=(UA+UB)/2。假设此时C相产生正向电流如绿色虚线iC1所示, 由于开关未导通, 电流只能由Udc电源负极经过二极管D6流向中性点, C相反电势需满足0-eC≥Udc/2。在这一霍尔区间内, C相反电势幅值小于另外两相, 那么当C相反电势高于Udc/2时, A, B两相反电势之和必然高于母线电压Udc, 从而导致母线电流方向与母线电压相反, 进而开始发电运行, 因此0-eC≥Udc/2的情况不可能出现在电动运行状态。假设C相能产生反向电流如蓝色箭头iC2所示, 则C相反电势需满足Udc/2+eC≥Udc, 即eC≥Udc/2, 同样该条件也不可能在电动运行时满足。因此, 当两相绕组对应的开关同时导通时, 不会在C相产生电流。
图 3b)为上管调制模式, 即下管常通时的关断状态。假设C相在Q1关断前没有电流, 当Q1关断后, 由于电感的存在, A, B相电流方向无法改变, 因此A相电流只能经过D2续流。此时有: UA=UB=0, UN=(UA+UB)/2=0。假设此时能产生C相电流如绿色虚线iC1所示, 则需满足0-eC≥0, 由于-E≤eC≤E, 所以当-E≤eC < 0时, 该假设成立。假设能产生C相电流如蓝色箭头iC2所示, 则需满足0+eC≥Udc。按以上原因该条件不可能存在, 所以在该开关状态下, C相必然会产生如iC1所示方向的电流。
 |
图3 单管导通时电流方向示意图 |
图 3c)为下管调制模式, 即上管常通时的关断状态。该状态下, UA=UB=0, uN=(UA+UB)/2=Udc, 可利用同样方法分析, 当C相电流如绿色虚线iC1所示, 需满足0-eC≥Udc, 而当C相电流如蓝色虚线iC2所示, 需满足Udc+eC≥Udc, 因此在该状态下, 当0≤ec < E时也会产生电流。
经过上述分析可以得出, 当2个开关同时导通时, 非导通相不会产生电流; 当2个开关同时关断时, 电流由电源Udc负极经过D2, D3续流至电源正极, 此时UA=0, UB=Udc, 中性点电压与导通时相同为Udc/2。因此采用如图 4a)所示的双管调制可以避免非导通相电流, 但这种调制方式会导致开关损耗加倍。
 |
图4 无刷直流电机调制方式 |
文献[25-26]提出了PWM-ON-PWM调制方法,如图 4b)所示, 当eC≥0时, 调制Q1, 常通Q4, 在eC < 0时, 调制Q4, 常通Q1即可消除C相电流。虽然通过转速估计反电势过零点可能存在一些误差, 然而由于反电势接近零时, 能产生的非导通相电流也很小, 对模型精确性的影响几乎可以忽略, 因此为了保持模型的精确, 本文采用该方法来进行调制。
当非导通相没有电流时, 仍以A, B相导通为例, 此时有UA=Udc, UB=0, UN=Udc/2, UC=eC+Udc/2, eA=-eB=E。代入(3)式可得
 (5)
(5)
当上管关断, 下管导通时, UA=UB=UN=0, UC=eC。而当下管关断, 上管导通时, UA=UB=UN=Udc, UC=eC+Udc。2种开关状态下都可推导出相同的电压方程, 如(6)式所示。
 (6)
(6)
在无刷直流电机换相过程中, 三相都有电流, 因此模型与导通过程不同。以图 4b)中60°电角度为例, 即由A, C相导通换相至A, B相导通, 在这种换相过程中, A相为非换相相, B相为换入相, C相为换出相。换相前C相下管Q6调制, 换相开始后Q6关断, B相下管Q4调制, 整个换相过程中A相上管Q1保持导通状态。而由于定子电感的存在, C相电流不能立刻消失, 当C相电流为0时, 换相过程才结束, 换相过程中的三相电流如图 5所示。
 |
图5 换相过程电流方向 |
图 5a)为换相过程上下桥臂开关导通时的三相电流方向, Q4导通后, A相电流与换相前保持一致, B相电流由中性点经过Q4流向电源Udc负极, C相电流经过D5, Q1续流。此时有: UA=UC=Udc, UB=0, eA=-eB=-eC=E, 再与(3)式一起代入(1)式可得三相电流方程如(7)式所示。
 (7)
(7)
图 5b)为换相过程中Q4关断后的三相电流方向, 三相电流在定子绕组上的方向与关断前保持一致, B相电流经过D3, Q1续流, C相电流仍旧经过D5, Q1续流。此时UA=UB=UC=Udc, 反电势与导通时相同, 再与(3)式一起代入(1)式可得三相电流方程如(8)式所示。
 (8)
(8)
为了建立统一的数学模型, 设相电流为ip, 换出相电流为io, 并令根据不同电角度区间ip与io取值按表 1执行。
ip取值表
根据表 1可以看出, 在60°~120°区间中, ip=iA, 因此(5)~(8)式中的diA/dt导通与换相2个阶段各自2种开关状态下4个相电流的电压方程, 通过对比可以发现, ke的系数只与是否正在换相有关, 正常导通阶段为-ω/L, 换相阶段为-4ω/3L。而(5)~(8)式中Udc的系数分别为1/2L, 0, 1/3L和0。为了用1个公式表示相电流, 设参数S, 当开关处于导通状态时S=1, 关断时S=0, 再设参数α, β用于区分换相阶段与正常导通阶段, 当霍尔状态发生变化时, 模型处于换相阶段, 令α=1/3, β=4/3。进入换相状态后, 对换出相电流进行采集, 理论上换出相电流io小于某一阈值时(本文取值0.1), 说明换相结束, 进入正常导通阶段, 则令α=1/2, β=1。因此, 相电流ip的电压方程可由(9)式表达。
 (9)
(9)
(9) 式可以为后续参数辨识算法提供准确的被控对象模型。
2 绞车用无刷直流电机参数辨识
图 6为模型参考自适应参数辨识的原理框图, 模型参考自适参数辨识主要由被辨识对象, 可调模型以及参数自适应律三部分组成。被辨识对象和可调模型应具有相同结构。
 |
图6 模型参考自适应参数辨识原理图 |
相同的信号输入给可调模型和被辨识对象后, 2个模型之间的参数差异会导致两者的输出信号存在误差, 误差信号根据自适应律对可调模型参数进行调整, 使可调模型的输出追踪被辨识对象的输出, 当误差为零时, 则能确定可调模型的参数即为被辨识对象的参数。
前文中, 通过(9)式已经确定了被辨识对象的数学模型结构, 根据(9)式建立可调模型如(10)式所示
 (10)
(10)
式中, 分别为电流, 电感, 电阻以及反电势系数的估计值。可调模型与被辨识对象的输入信号相同, 由于参数差异, 被辨识对象的输出ip与可调模型输出
分别为电流, 电感, 电阻以及反电势系数的估计值。可调模型与被辨识对象的输入信号相同, 由于参数差异, 被辨识对象的输出ip与可调模型输出 之间存在误差e, 如(11)式所示。
之间存在误差e, 如(11)式所示。
 (11)
(11)
对误差e求导后, 将 以及(9)~(10)式代入(11)式可得
以及(9)~(10)式代入(11)式可得
 (12)
(12)
令 , 代入(12)式可得
, 代入(12)式可得
 (13)
(13)
自适应律可以通过李雅普诺夫第二方法来构建, 建立(14)式的李雅普诺夫方程V(e, a, b, c)
 (14)
(14)
通过(14)式可以看出, V(e, a, b, c)明显为正定, 如果(e, a, b, c)负定, 则系统稳定。
对(14)式求导可得
 (15)
(15)
将(13)式代入(15)式, 经过整理可得
 (16)
(16)
通过(16)式可以发现, R和L必然大于0,  必然小于等于0, 如果有
必然小于等于0, 如果有 
 被满足, 则
被满足, 则 负定, 被辨识对象与可调模型之间的输出误差随着时间的推移会收敛至0。
负定, 被辨识对象与可调模型之间的输出误差随着时间的推移会收敛至0。
为确保 负定, 将
负定, 将
 分别代入上述条件, 则可推导出自适应律如(17)~(19)式所示。
分别代入上述条件, 则可推导出自适应律如(17)~(19)式所示。
 (17)
(17)
 (18)
(18)
 (19)
(19)
在实际辨识过程中, 先对电机的定子电感进行辨识, K1, K2, K3为自适应律的积分系数, 会影响辨识精度与速度。系数越大, 辨识速度越快, 但稳态精度也会相对降低, 可根据实际应用需求, 对上述系数进行调整。
由于控制算法通常需通过DSP来实施, 因此需要对算法进行离散化处理。令 
 , 其中ts为逆变器开关周期, 考虑到ts很小, 可调模型在k时刻的输出电流可由(20)式表示。
, 其中ts为逆变器开关周期, 考虑到ts很小, 可调模型在k时刻的输出电流可由(20)式表示。
 (20)
(20)
式中,  为k-1时刻估算出的电感, 电阻以及反电势系数, Dk-1为k-1时刻PWM占空比, 取值范围为[0, 1]。k时刻被辨识对象与可调模型输出电流的误差ek为
为k-1时刻估算出的电感, 电阻以及反电势系数, Dk-1为k-1时刻PWM占空比, 取值范围为[0, 1]。k时刻被辨识对象与可调模型输出电流的误差ek为
 (21)
(21)
式中, ik为k时刻实际电流值。得到ek后, k时刻电感、电阻以及反电势系数可分别按(22)~(24)进行迭代。
 (22)
(22)
 (23)
(23)
 (24)
(24)
理论上, 上述方法可以对3个参数同时进行在线辨识, 然而辨识速度与精度随着被辨识参数数量增加而降低。实际运行中, 电阻的变化主要受损耗发热产生的温度影响, 其变化速度很慢, 航空绞车电机在实际工况中不会长时间连续工作, 暂停时由机械制动器锁死传动轴使转子位置可以固定, 而在每次起动时, 又会在松开制动器以前就开始输出电磁转矩, 从而防止制动器松开瞬间出现倒溜现象, 这段时间内转速为零。因此, 可以利用这段堵转的时间, 先对电阻和电感初值进行辨识, 当电机开始转动后, 停止电阻辨识, 而只对电感和反电势系数进行辨识, 即可有效改善电机相关参数的辨识精度和速度。
图 7为电机参数辨识算法的流程图, 首先需要判断是否处于换相状态, 如果霍尔信号发生改变, 则进入换相状态, 根据表 1确定相电流与换相电流, 并将换相标志Com-Flag置为1。当Com-Flag为1时, 令α=1/3, β=4/3, 并对换出相电流进行采集, 如果换出相电流小于某一阈值时, 说明换相结束, 进入正常导通状态, 则将换相标志Com-Flag清零, 并令α=1/2, β=1。当参数α与β确定后, 采集k时刻电流ik与母线电压Udc, 通过(20)式计算 , 然后计算误差ek, 如果处于堵转状态, 则通过(22)~(23)式来计算定子电感和电阻, 若制动器松开后, 则通过(22)和(24)式计算电感和反电势系数。
, 然后计算误差ek, 如果处于堵转状态, 则通过(22)~(23)式来计算定子电感和电阻, 若制动器松开后, 则通过(22)和(24)式计算电感和反电势系数。
 |
图7 参数辨识算法流程图 |
3 实验结果分析
图 8为航空电动绞车电机模拟实验设备,绞车用无刷直流电机与负载电机经过转矩传感器同轴连接,负载电机用于提供负载转矩,负载电机制动运行时所产生的电能在负载电阻上消耗。2台电机分别由2台控制器独立控制,示波器用于记录电参数的波形。表 2所示为绞车电机的实测参数。
 |
图8 电动绞车模拟实验设备及实验场景 |
绞车电机参数
图 9为电机堵转阶段,系统对定子电阻和电感的离线辨识实验,在每次开始辨识之前,会将电感初值(L0)与电阻初值(R0)设为实测值(L, R)的2倍或0.5倍,实验开始后输出电磁转矩,并同时开始参数辨识。
 |
图9 不同初值条件下电感和电阻离线辨识实验 |
在图 9中,红色曲线为A相电流,黄色曲线为可调模型输出的电流值,1 A电流对应100 mV电压。蓝色曲线为辨识的电感值,3 V对应2倍实测电感值。绿色曲线为辨识的电阻值,3 V对应2倍实测电阻值。
在4次实验中,电感和电阻虽然都被设置为不同的初值,经过不多于50 ms的振荡后,都能收敛至实测值附近,由此可以看出,随着电感和电阻辨识稳定后,可调模型输出的电流幅值也会稳定在实际电流值的平均值附近。
图 10是定子电感、电阻辨识实验的稳态波形,可以看出定子电感波动明显小于电阻波动,经过测量,电阻辨识的最大误差约为1.93%,电感辨识几乎没有误差。
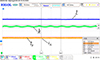 |
图10 定子电感和电阻辨识稳态误差实验曲线 |
图 11所示为额定工况下(2 000 r/min,5 Nm)定子电感和反电势的辨识实验波形,当电机在额定工况运行时,将电阻初值设置为实测值,将电感初值(L0)和反电势初值(ke0)设置为2倍或0.5倍的实测值(L, ke),以便验证本文算法是否能正确辨识电机定子电感与反电势系数。在图 11中,红色曲线为A相电流,黄色曲线为可调模型输出的电流值,1A电流对应100 mV电压。蓝色曲线为辨识的电感值,3 V对应2倍实测电感值。绿色曲线为辨识的反电势系数,3 V对应2倍实测反电势系数。
 |
图11 不同初值条件下电感与反电势系数辨识曲线实验 |
由图 11可看出,无论电感初值和反电势系数初值设定为实测值的2倍或0.5倍, 在不超过50 ms的辨识后, 辨识结果都会稳定在实测值附近。可调模型的输出电流也会稳定在实测电流的平均值附近。
图 12是电感与反电势系数2个参数辨识实验的稳态误差。通过对比可以明显看出,电感辨识结果几乎没有误差,而反电势系数辨识的最大误差仅为2.33%。
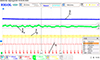 |
图12 电感和反电势系数辨识稳态误差曲线实验 |
绞车电机起动时,在松开制动器前电机需要预先输出电磁转矩以防止绞车倒溜,此时电机处于堵转状态,在这个阶段先对电感和电阻进行辨识;当制动器松开后,停止辨识电阻的迭代,立即对电感和反电势系数进行在线辨识。由于示波器只有4个通道,且电阻辨识已在图 10所示实验中验证过,运行工况与此次实验完全相同,所以对电阻的辨识不再进行记录。此次实验只对A相电流(红色曲线)、可调模型输出电流(黄色曲线)、电感辨识值(蓝色曲线)与反电势系数辨识值(绿色曲线)进行辨识结果的监测。
图 13a)是额定转速工况下,负载转矩由0.5倍额定值阶跃至额定值时辨识的实验波形。电感在堵转阶段已经稳定在实测值附近,当电机开始转动后,反电势系数迅速由2倍实测值的初值变化至实测值附近,电感的辨识值在轻微波动后,也继续稳定在实测值附近。当负载转矩发生变化时,2个参数的辨识值几乎没有波动,可调模型的输出电流也紧随A相电流变化。
图 13b)为额定负载转矩条件下,转速由0.5倍额定值阶跃至额定值的辨识实验波形,图 13c)则展示了负载转矩与转速同时由0.5倍额定值阶跃至额定值的辨识实验波形。其参数的辨识性能与可调模型输出电流与13a)的实验结果基本一致。通过对比可以发现,当速度为0.5倍额定值时,反电势系数的辨识速度会相对下降,但是当辨识到的参数稳定以后,即使工况发生突变,被辨识的参数也不会出现剧烈波动,可调模型的输出电流基本与实际电流一致。通过对比可以发现,当输出功率达到额定功率时,反电势系数的稳态误差达到最大,在图 12所示实验中已经测量过,不超过2.5%,能够满足很多工程上其他算法所需的参数精度要求。
 |
图13 不同实际工况下的参数辨识实验 |
图 14展示了本文提出的参数辨识方法在无刷直流电机转矩脉动抑制算法中的应用结果,文献[27]提出了一种转矩脉动抑制方法,而该方法需要准确的电机参数才能实现。图 14中,红色曲线与黄色曲线分别为A、B两相电流波形,蓝色曲线和绿色曲线为实验中的反电势系数和电感辨识曲线。
 |
图14 参数辨识方法应用实验 |
实验分为3个阶段,实验开始前将电感与反电势系数设置为实测值的0.8倍,第1阶段中不采用文献[27]提出的转矩脉动抑制方法,第2阶段中加入文献[27]提出的转矩脉动抑制方法,第3阶段加入本文提出的参数辨识方法。通过对比可以看出:第2阶段的换相脉动明显小于第一阶段,证明文献[27]提出的方法的确可以抑制换相脉动,但是由于算法中所使用的参数为实际参数的0.8倍,因此仍旧存在一定的换相脉动,当第3阶段加入本文提出的参数辨识方法后,错误参数被在线校正,换相脉动几乎消失,由此可以证明本文所提出参数辨识方法的可行性与有效性。
4 结论
本文针对绞车用无刷直流电机定子电感、电阻以及反电势系数这3个关键参数的辨识问题开展了以下研究工作:
1) 针对无刷直流电机“三相六步”导通模式下,详细研究了换相以及调制方式对三相电流的影响,建立了一个统一的数学模型。
2) 在该模型基础上,采用模型参考自适应辨识算法,结合绞车用无刷直流电机频繁起停的实际工况,实现了对电阻与电感的离线辨识,以及电感与反电势系数的在线辨识。
3) 通过实验对本文所提出的参数辨识方法进行了验证,获得较高的辨识精度: 电感辨识误差不大于1%;电阻辨识误差不大于2%;反电势系数辨识误差不大于2.5%。通过该算法,可以获得更加准确的数学模型,为电流环PI参数的调节、转矩脉动抑制以及一些如模型预测等先进算法的应用提供了可靠参考。
References
- Petrov I, Pyrhonen J. Performance of low-cost permanent magnet material in PM synchronous machines[J]. IEEE Trans on Industrial Electron, 2013, 60(6): 2131–2138 [Article] [Google Scholar]
- Buja G, Bertoluzzo M, Keshri R K. Torque ripple-free operation of PM BLDC drives with petal-wave current supply[J]. IEEE Trans on Industrial Electron, 2015, 62(7): 4034–4043 [Article] [Google Scholar]
- Sarlioglu B, Morris C T. More electric aircraft: review, challenges, and opportunities for commercial transport aircraft[J]. IEEE Trans on Transportation Electrification, 2015, 1(1): 54–64 [Article] [Google Scholar]
- Nerat M, Vranĉic D. A novel fast-filtering method for rotational speed of the BLDC motor drive applied to valve actuator[J]. IEEE/ASME Trans on Mechatronics, 2016, 21(3): 1479–1486 [Article] [Google Scholar]
- Hladík P, Andoga R, Fózó L, et al. Efficiency of BLDC fuel pump controllers of small turbojet engines[C]//2020 New Trends in Aviation Development(NTAD), Starý Smokovec, Slovakia, 2020: 93–98. [Google Scholar]
- Fang Chun. Temperature rise & loss suppression of brushless DC motor for helicopter rescuehoist at multi-elevations[D]. Xi'an: Northwestern Polytechnical University, 2018. (in Chinese) [Google Scholar]
- Li Yazhong. Research on parameter identification of permanent magnet brushless DC wheel hub motor of electric vehicle[D]. Changsha: Changsha University of Science & Technology, 2015. (in Chinese) [Google Scholar]
- Xia K, Ye Y, Ni J, et al. Model predictive control method of torque ripple reduction for BLDC motor[J]. IEEE Trans on Magnetics, 2020, 56(1): 1–6 [Google Scholar]
- Lee Y. A new method to minimize overall torque ripple in the presence of phase current shift error for three-phase BLDC motor drive[J]. Canadian Journal of Electrical and Computer Engineering, 2019, 42(4): 225–231 [Article] [Google Scholar]
- Wang Q, Wang G, Zhao N, et al. An impedance model-based multiparameter identification method of PMSM for both offline and online conditions[J]. IEEE Trans on Power Electronics, 2021, 36(1): 727–738 [Article] [Google Scholar]
- Liu Shaobo, Wang Qiwei, Wang Gaolin, et al. Virtual-axis injection based online parameter identification of PMSM considering cross coupling and saturation effects[J]. IEEE Trans on Power Electronics, 2023, 38(5): 5791–5802 [Article] [Google Scholar]
- Xie C, Zhang S, Li X, et al. Parameter identification for spmsm with deadbeat predictive current control using online PSO[J]. IEEE Trans on Transportation Electrification, 2024, 10(2): 4055–4064 [Article] [Google Scholar]
- Song Jianguo, Zhang Zhenlu, Li Xiangcheng. Multi-parameter identification of permanent magnet synchronous motor based on improved least square method[J]. Electric Machines & Control Application, 2021, 48(3): 16–21 (in Chinese) [Google Scholar]
- Qi Xiang, Zhang Xinguang, Deng Yinzhe. Online parameter identification of remote operated vehicle motion using generalized least squares method[J]. Ship Engineering, 2021, 43(5): 111–113 (in Chinese) [Google Scholar]
- Chen Weimin. Research on the online parameter estimation of permanent magnet synchronous machine[D]. Beijing: Beijing Jiaotong University, 2020. (in Chinese) [Google Scholar]
- Shi Tingna, Zhang Qian, Xiao Youwen, et al. Online parameter identification and sliding mode observation of back-electromotive force of brushless direct current motors[J]. Acta Armamentarii, 2013, 34(6): 739–747 (in Chinese) [Google Scholar]
- Guo Honghao, Zhou Bo, Zuo Guangjie, et al. Adaptive sliding-mode observer for back electromotive force estimation of brushless DC motor[J]. Proceedings of the CSEE, 2011, 31(21): 142–149 (in Chinese) [Google Scholar]
- Wang Chongwu, He Longfei, Li Hong. On-line parameter identification of torpedo propulsion brushless DC motors[J]. Journal of Northwestern Polytechnical University, 2013, 31(3): 373–377 [Article] (in Chinese) [Google Scholar]
- Li Boqun. Research on parameter identification and torque ripple suppression technologies for brushless DC motor used in electric tricycle[D]. Hangzhou: Zhejiang University, 2022. (in Chinese) [Google Scholar]
- Lou Tianhao. Research on control technology of automotive brushless DC motor based on improved particle swarm algorithm parameter identification[D]. Hangzhou: Zhejiang University, 2022. (in Chinese) [Google Scholar]
- Pakdeeto J, Wansungnoen S, Areerak K. Parameter Identification and optimal speed controller design for BLDC motor using the genetic algorithm[C]//2024 2nd International Conference on Mechatronics, Control and Robotics, Jeju, Republic of Korea, 2024: 73–77. [Google Scholar]
- Chaicharoenaudomrung K, Wansungnoen S, Pakdeeto J, et al. Parameter identification of BLDC motor by using adaptive tabu search[C]//2021 International Conference on Power, Energy and Innovations, Nakhon Ratchasima, Thailand, 2021: 5–8. [Google Scholar]
- Jasper D V, David C, Stiin D, et al. Online impedance estimation for sensorless BLDC motor motion applications[C]//2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering, Mauritius, 2021: 1–6. [Google Scholar]
- Mo Y, Luo X, Ma C, et al. Improved PSO parameter identification-based composite STSM controller for BLDC drives[C]//2024 4th International Conference on Artificial Intelligence, Robotics, and Communication, Xiamen, China, 2024: 460–468. [Google Scholar]
- Meng G, Xiong H, Li H. Commutation torque ripple reduction in BLDC motor using PWM-ON-PWM mode[C]//2009 International Conference on Electrical Machines and Systems, Tokyo, Japan, 2009: 1–6. [Google Scholar]
- Krishnan G, Ajmal K T. A neoteric method based on PWM ON PWM scheme with buck converter for torque ripple minimization in BLDC drive[C]//2014 Annual International Conference on Emerging Research Areas: Magnetics, Machines and Drives, Kottayam, India, 2014: 1–6. [Google Scholar]
- Xia K, Ye Y, Ni J, et al. Model predictive control method of torque ripple reduction for BLDC motor[J]. IEEE Trans on Magnetics, 2020, 56(1): 1–6 [Google Scholar]
All Tables
All Figures
|
图1 无刷直流电机三相等效驱动电路 |
| In the text | |
|
图2 无刷直流电机调制方式 |
| In the text | |
|
图3 单管导通时电流方向示意图 |
| In the text | |
|
图4 无刷直流电机调制方式 |
| In the text | |
|
图5 换相过程电流方向 |
| In the text | |
|
图6 模型参考自适应参数辨识原理图 |
| In the text | |
|
图7 参数辨识算法流程图 |
| In the text | |
|
图8 电动绞车模拟实验设备及实验场景 |
| In the text | |
|
图9 不同初值条件下电感和电阻离线辨识实验 |
| In the text | |
|
图10 定子电感和电阻辨识稳态误差实验曲线 |
| In the text | |
|
图11 不同初值条件下电感与反电势系数辨识曲线实验 |
| In the text | |
|
图12 电感和反电势系数辨识稳态误差曲线实验 |
| In the text | |
|
图13 不同实际工况下的参数辨识实验 |
| In the text | |
|
图14 参数辨识方法应用实验 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.