| Issue |
JNWPU
Volume 44, Number 1, February 2026
|
|
|---|---|---|
| Page(s) | 81 - 91 | |
| DOI | https://doi.org/10.1051/jnwpu/20264410081 | |
| Published online | 27 April 2026 | |
A polar flight guidance method based on polar-plane rhumb route
基于极平面等角航线的极区飞行引导方法
1
School of Automation, Northwestern Polytechnical University, Xi'an 710072, China
2
AVIC the First Aircraft Institute, Xi'an 710089, China
Received:
27
May
2025
Abstract
When civil aircraft flies along a great circle route, the route is usually approximated by multiple rhumb routes segments in order to guide easily. However, traditional guidance methods become inadequate for the flight in polar regions since great circle routes exhibit non-constant azimuth, while rhumb routes converge into high-curvature spirals. To solve these problems, a polar guidance method based on the polar-plane rhumb route was proposed in this paper. Firstly, the polar plane was defined and a polar-plane parameter projection algorithm was derived, therefore overcoming the limitations of traditional mechanization schemes that only work within specific ranges and require complex coordinate system switching calculation based on navigation area. Then, according to the projection characteristics of great circle routes on the polar plane, the polar-plane rhumb route was defined and its route equations were deduced. The proposed polar-plane rhumb route maintains constant polar-plane azimuth while possessing the route length comparable to that of the great circle route, thus being more suitable as a reference route in polar regions. Finally, a flight guidance algorithm based on polar-plane rhumb route was derived and relative polar flight simulation was conducted based on a transport aircraft model. The simulation results demonstrate that the aircraft guided based on polar-plane rhumb route can fly with high precision in polar regions.
摘要
民航客机在执行大圆航线飞行时, 为便于飞行, 通常将大圆航线近似为多段等角航线。但在极区飞行时, 大圆航线航向通常不是常值、等角航线收敛为螺旋线, 因此传统飞行引导方式不能适应极区飞行环境。为解决此问题, 提出了一种基于极平面等角航线的极区飞行引导方法。定义了极平面并提出了极平面参数投影转换算法, 克服了传统力学编排方案只在一定范围内适用, 且需要根据导航范围进行复杂的坐标系切换的问题。在分析大圆航线极平面投影特性的基础上, 给出了极平面等角航线定义, 并推导了极平面等角航线航程方程; 极平面等角航线在保证其极平面航向角不变的同时拥有与大圆航线相近的航程, 便于极区飞行引导。在定义极平面等角航线后, 提出了基于极平面等角航线的飞行引导算法, 并以某型运输机为例进行了极区仿真飞行测试, 仿真结果表明, 该引导方法能够在极区实现高精度飞行引导。
Key words: polar navigation / polar plane / flight guidance / great circle route / rhumb route
关键字 : 极区导航 / 飞行引导 / 大圆航线 / 等角航线 /
© 2026 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
随着北极地区战略价值的不断提升以及我国海外利益的持续拓展,极区导航技术,特别是大型飞机极区飞行引导技术是我国实现全球力量投送必须要掌握的关键技术[1-3]。这对打破西方对我国的技术封锁,实现国产大飞机走向世界具有重要的战略意义。
高精度的极区引导技术涉及极区力学编排技术、极区参考系及参考航线构建技术和极区飞行引导指令计算等问题。
传统力学编排方案在极区存在以下问题:①速度方程包含纬度正切值,在极区解算飞机速度时可能导致数据溢出、解算精度降低等问题[2, 4-5]。②经线收敛于极点,使得航向角变化剧烈导致指令角速度很大。因此地理北向难以作为可靠的航向参考基准[6]。③极点处无法确定北向、北向速度和航向角[7]。为解决上述问题,学者们提出了一系列适用于极区的力学编排方案。部分学者对格网力学编排进行了研究[8-13],该方案引入格网航向角替代传统航向角,并基于格网坐标系解算所有导航参数,从而解决了航向无法定义及解算数据溢出等问题。另有部分学者对横向力学编排展开研究[14-16],该方案通过将传统的经纬线横传90°构建了新的横向地球坐标系,有效避免了极点处经线收敛的问题。Liu等[16]提出了伪地球系力学编排,该方案使用的伪地球坐标系由原地球坐标系旋转生成,将极点转化为普通的坐标点,从而避免了传统力学编排在极点处出现解算奇异的问题。然而,上述力学编排均只能在一定范围内使用,因此导航计算机需要组合不同力学编排方案并在合适位置进行切换实现全球导航[17-22]。由于不同编排方式所使用的参考系各不相同,需要单独对各套力学编排设计复杂的切换算法,这不仅加大了计算机的负担,还可能在坐标切换过程中引发导航信号振荡的问题[17]。因此,寻找一种空间关系清晰、力学编排切换逻辑简单的极区航线定义方案是非常必要的。
由于大圆航线具有航程最短的优势,传统的飞行引导方案通常将其作为参考航线。为方便飞行,实际情况中通常将整段大圆航线拆分并近似为多段等角航线进行引导[23]。然而在极区,由于经线收敛于极点,大圆航线航向急剧变化,导致拆分后的等角航线方位角之间存在显著差异。由于方位角是生成等角航线引导指令的关键参数,航段切换过程中这种方位角的突变将导致飞行引导指令出现大幅振荡[24]。同时,等角航线在极区为收敛于极点的螺旋线,其曲率极大、实际航程很远[25],严重影响了飞行经济性。因此,传统的民航客机飞行引导算法无法适用于极区飞行。目前,针对极区飞行引导算法的研究仍相对有限。尽管波音787和空客A350等机型已具备极区导航能力,但由于涉及商业机密,目前仍缺乏公开的极区飞行引导方案。作为极区导航系统的核心组成部分,极区飞行引导算法,是我国必须突破并实现自主掌握的关键技术。
针对上述问题,本文提出了极平面等角航线和基于极平面等角航线的飞行引导方法。首先定义了极平面坐标系,并通过将力学编排的输出先投影到地心地固坐标系(Earth centered, Earth fixed, ECEF)再投影到极平面的方式,实现了极区力学编排参考系的统一。其次,在分析大圆航线在极平面投影特性的基础上, 提出了极平面等角航线并推导了航线方程、航向角计算公式和航程计算公式。该航线兼具等角航线航向角不变和大圆航线航程短的特性,适合在极区作为大圆航线的近似航线。在定义极平面等角航线后,提出了极平面飞行引导算法,该引导算法保留了与传统等角航线引导算法相同的引导律构型,拓展了民航客机的极区飞行能力。仿真结果表明,相比于用等角航线近似大圆航线,采用极平面等角航线近似大圆航线并用本文所提方法引导飞机时,飞行总航程更短,指令变化更平缓,飞机相对参考航线的侧偏距更小。
1 极平面定义
1.1 极平面及极平面坐标系定义
ECEF系如图 1所示,其原点为地球球心,X轴、Y轴在赤道平面内且分别指向0°经线和90°E经线,Z轴垂直于赤道平面并指向北极。
 |
图1 极平面及极平面坐标系定义 |
极平面为过北极点且平行于赤道的平面。极平面坐标系为平面坐标系, 该系以北极点OP为原点, 其坐标轴XP和YP轴与ECEF系的X和Y轴平行。
1.2 极平面参数投影转换算法
为了避免力学编排参考系间的复杂切换, 本文将力学编排的输出均投影到极平面, 实现力学编排、参考航线构建和飞行引导的统一。极平面参数投影转换算法如下。
1) 将力学编排的输出转换到ECEF系下。
由于不同力学编排方案参考系各不相同, 需要通过转换矩阵将各种力学编排的解算结果转换到ECEF系下。地球上一点P在力学编排参考系n系下的坐标投影到ECEF系后的坐标可用(1)式表示。
 (1)
(1)
式中,[XPe YPe ZPe]eT和[XPn YPn Z Pn]nT分别表示P在ECEF系下和在n系下的坐标;矩阵Cne为n系向ECEF系的投影矩阵, 其具体表达式可分为3种情况。
(1) 格网坐标系向ECEF系的转换矩阵
格网坐标系(G系)向ECEF系(e系)的转换矩阵如(2)式所示[8-13], 其中L, λ分别为格网坐标系原点的纬度、经度, σ为格网角。格网坐标系的具体定义见文献[8]。
 (2)
(2)
(2) 横向坐标系向ECEF系的转换矩阵
横向坐标系(t系)向ECEF系的转换矩阵如(3)式所示[14-15]。横向坐标系定义见文献[15]。
 (3)
(3)
(3) 伪地球坐标系向ECEF系的转换矩阵
伪地球坐标系(p系)向ECEF系的转换矩阵如式(4)所示[16], 其中λ0为伪坐标系原点的经度。伪地球坐标系的具体定义见文献[17]。
 (4)
(4)
2) 将ECEF系下的坐标转换到极平面坐标系
由于极平面平行于赤道平面, 地球上一点P在ECEF系下的坐标投影到极平面后的坐标可用(5)式表示
 (5)
(5)
式中: 矩阵CeA为投影矩阵,  ; [XPe YPe ZPe]eT和[XPA YPA]AT分别表示P点在ECEF系和极平面下的坐标。
; [XPe YPe ZPe]eT和[XPA YPA]AT分别表示P点在ECEF系和极平面下的坐标。
2 极平面等角航线的定义、航线方程的推导与航程计算
2.1 大圆航线在极平面上投影分析
当大圆航线不过极点且不为赤道时, 如图 2所示。
 |
图2 大圆航线在极平面投影及关键向量示意图 |
设P0(L0, λ0)为该大圆航线对应的大圆上最靠近北极点的一点, 其中L0, λ0分别为该点的纬度、经度。单位向量uP0为P0处的地垂线向量, 该向量在ECEF系下的表达式为
 (6)
(6)
单位向量ut为大圆航线在P0处的切线向量, 该向量位于过P0的地平面上, 方向与大圆航线正向相同。由于地球球面上各点与极点的距离仅取决于该点的纬度, 而P0是大圆上最靠近北极点的点, 因此ut沿P0处地理北向(纬度增加的方向)的梯度为0, 即ut与P0处的地理东向平行, 从而ut与ECEF系的XOY平面平行。因此, ut在ECEF系的投影可由(7)式表示。
 (7)
(7)
式中,α为ut与ECEF系OX轴的夹角。由于ut⊥uP0, 可得
 (8)
(8)
将(6)式和(7)式代入(8)式, 可得α=λ0+90°。因此, ut在ECEF系下的具体表达式如(9)式所示。
 (9)
(9)
设un为大圆航线的法向量, 其方向和大圆航线正方向满足右手定则。由于un⊥uP0且un⊥ut, un在ECEF系的坐标可由(10)式表示。
 (10)
(10)
设P为大圆航线上任一点, 向量rOP沿ECEF系原点O指向P点。设向量rOP在ECEF系下的坐标为[XPe YPe ZPe]eT, 由于rOP⊥un, 可得
 (11)
(11)
假设P点高度为h, 地球半径为R, 则
 (12)
(12)
设P点在极平面的投影点为P′, P′在极平面的坐标为[XpA YpA]AT。由(5)式可知, P与P′在各自坐标系下的X轴、Y轴分量相等, 设X=XPA=XPe, Y=YPA=YPe。联立(11)~(12)式并消除变量ZPe, 可以得到大圆航线在极平面投影方程为
 (13)
(13)
整理(13)式, 可得
 (14)
(14)
由(10)式可知, 大圆航线在极平面上的投影为椭圆。设P1为该椭圆上靠近P0一侧的短轴顶点, 依据短轴顶点的坐标公式, 可推导得出P1在极平面下的坐标。
 (15)
(15)
设向量rOP0从ECEF系原点O指向P0, 该向量在ECEF系下表达式如(16)所示, 详细推导过程见文献[25]。
 (16)
(16)
对比(15)~(16)式可得, P1恰为P0在极平面的投影。依据椭圆“在短轴顶点的曲率最小, 且曲率随着远离短轴顶点单调增大”的特性, 可以得到以下结论: 在同一条大圆航线中, 各大圆航线段在极平面投影的平均曲率随着航段靠近极点而降低。
对(14)式求全微分, 可得
 (17)
(17)
整理得
 (18)
(18)
曲线在点(X, Y)处的曲率表达如(19)式所示。
 (19)
(19)
式中, K为曲线在点(X, Y)处的曲率。将(15)~(16)式代入(19)式, 可以求得投影椭圆在P1处的曲率。
 (20)
(20)
分析(20)式可知, 椭圆在投影点P1处的曲率仅与其对应点P0的纬度有关而与其经度无关, 且随着P0纬度增加, 其投影点P1处的曲率不断减少。特别地, 当大圆航线过极点时, P0恰为北极点, 此时大圆航线在极平面的投影为一条直线, 即KP1=0;当大圆航线沿赤道时, 大圆航线在极平面的投影为一正圆, 各点曲率相等且大于其他情况下的曲率。因此可以得到以下结论: 对于不同大圆航线, 越靠近北极的大圆航线在极平面投影的曲率越小。
因此, 可以将以上2点结论总结为: 大圆航线靠近极区的航段在极平面上投影的曲率较小, 且随着大圆航线靠近极点而趋向于一条直线。
由(20)式可以计算得到: 纬度高于85°的大圆航线投影曲率的数量级为10-16, 约为低纬度大圆航线的百分之一, 可以近似于一条直线。从另一个角度来看, 极平面上一条靠近极点的直线, 反向映射到地球球面上也应对应着一段与高纬度大圆航线段近似的曲线。基于以上结论, 下文将提出一条极平面等角航线, 该航线在地球球面上的空间形状与大圆航线近似, 且在极平面上的投影为一条直线。因此该航线能保证其极平面方位角不变,同时, 航程也近乎最短, 适合在极区作为大圆航线的近似航线。
2.2 极平面等角航线的定义及航线方程和航程计算
2.2.1 极平面等角航线定义和航线方程
如图 3所示, 极平面等角航线在球面上空间位置由起点Pa(La, λa)、终点Pb(Lb, λb)唯一确定。
 |
图3 极平面等角航线示意图 |
设P′a和P′b为Pa和Pb在极平面的投影, P′a和P′b在极平面坐标分别为
 (21)
(21)
 (22)
(22)
极平面等角航线在极平面的投影为一条从P′a到P′b的直线, 基于P′a和P′b的坐标可以得到该直线的表达式为
 (23)
(23)
P′是极平面等角航线在极平面投影直线上的任一点, P′在极平面的坐标为[X Y]AT, χ为直线的方位角, 其表达式为
 (24)
(24)
如图 3所示, P为P′反向投影到极平面等角航线上的一点, P点纬经高坐标为(L, λ, h)。结合(5)式及(16)式, 可以得到两点的坐标关系为
 (25)
(25)
结合(23)~(25)式, 可以得到极平面等角航线的球面表达式, 如(26)式所示。其中, hg为飞行计划给定的极平面等角航线在P点的高度
 (26)
(26)
2.2.2 极平面等角航线航程计算公式推导
设点P在ECEF系下的坐标为[X Y Z]ECEFT, 纬经高坐标为(L, λ, h)。结合(12)式及(23)式, 可以得到X, Y, Z的关系, 如(27)式所示
 (27)
(27)
式中,A和b如(28)式所示
 (28)
(28)
设dS为微分弧长, 结合(27)~(28)式, dS与极平面X轴微分dX的关系如(29)式所示。
 (29)
(29)
因此, 极平面等角航线总航程S的计算公式为
 (30)
(30)
2.2.3 极平面等角航线近似大圆航线仿真算例
为了验证极平面等角航线近似大圆航线的效果, 设计以下仿真算例: 地球参考模型为圆球体, 半径为637 139 3 m。大圆航线起点为(75°N, 10°E), 终点为(70°N, 170°E), 高度始终为8 000 m, 总航程为2 069.96 n mile。分别用一段极平面等角航线和十段等角航线来近似大圆航线, 比较2种近似方法在航程、航向上的差异。大圆航线、极平面等角航线、十段等角航线的经纬度变化如图 4所示, 极平面等角航线的极平面方位角、大圆航线和十段等角航线的方位角随航程的变化如图 5所示, 2种近似航线的总航程、与大圆航线的航程差及航程相对偏差如表 1所示。
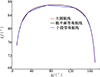 |
图4 大圆航线、极平面等角航线、十段等角航线的经纬度变化 |
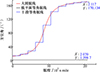 |
图5 极平面等角航线在极平面上的方位角、大圆航线和十段等角航线的方位角随航程的变化 |
大圆航线和极平面等角航线的总航程及相对于大圆航线的航程差
3 基于极平面等角航线的飞行引导
在定义极平面等角航线基础上, 提出了一种基于极平面的三维引导算法, 该算法分为极平面水平引导算法和地理坐标系垂直引导算法两部分。极平面水平引导算法将极平面等角航线和飞机位置、速度投影到极平面并基于两者在极平面的位置关系生成水平引导指令; 地理坐标系垂直引导算法基于力学编排输出的飞机在地理系下的高度、垂速等信息以及航段的高度信息生成垂直引导指令。考虑到极平面等角航线的表达式是基于圆球模型推导的, 而力学编排通常以椭球体作为地球参考模型, 为消除由于参考模型不同而导致的误差, 提高引导精度, 使用双重投影法[26]将参考航线和飞机实时位置统一到相同的参考系中。本文先将力学编排的输出等角投影到圆球体上, 再通过1.2节所述极平面投影算法将其投影到极平面上。双重投影的表达式如(31)式所示。
 (31)
(31)
式中:ϕ和l为飞机在圆球模型下的经纬度;L和λ表示飞机在椭球模型下的经纬度;R是圆球模型的半径;e是椭球模型的偏心率;L0=90和ϕ0=90分别表示北极点在椭球模型和圆球模型下的纬度;RN0为极点处的卯酉圈半径;ω1为投影角度变形。
双重投影的形变率如(32)式所示, 其中ϕ0为基准点纬度。
 (32)
(32)
由(32)式可知, 当基准点选为极点时, 投影形变率随飞机靠近极点而降低。特别地, 当飞机纬度为90°时, 形变率仅为0.022 6%;当飞机纬度为75°时, 形变率为1.755 9%。因此, 在极区的大范围地区, 所使用的双重投影方式都能保证较高的投影精度。
3.1 极平面水平引导算法
空客、波音公司在A350、B787的飞行手册都强调了飞机在进入极区切换引导算法的过程中, 应保证水平引导的连续性。因此, 本文提出的极平面水平引导算法采用和传统等角航线水平引导算法一致的引导构型。
 (33)
(33)
式中:ϕg为滚转角指令;VGND为飞机地速;χg为参考航线的应飞方位角; χ为飞机当前时刻的方位角。对于等角航线飞行引导算法, χg为该段等角航线的方位角, χ为飞机的航迹方位角; 对于极平面等角航线飞行引导算法, χg为极平面等角航线在极平面投影的方位角, χ为ECEF系下飞机速度矢量在极平面投影与极平面XP轴的夹角, 称为极平面航迹方位角。由于极平面方位角仅取决于飞机的速度矢量, 而与飞机和极点之间的相对位置无关, 因此采用该参数进行飞行引导可以有效避免传统以航向角作为引导参数而存在过极点时,因航向角无法定义而导致的引导指令解算奇异问题。χ的计算方法如(34)式所示。Δd为飞机相对于参考航线的横向偏差距离。对于等角航线飞行引导算法, Δd即为飞机相对于等角航线的侧偏距, 其具体计算方法见文献[27];对于极平面等角航线飞行引导算法, Δd为飞机位置和极平面等角航线的距离, 计算方法如(35)式所示。kd和kχ为增益。
 (34)
(34)
 (35)
(35)
式中:L, λ和χk分别为飞机当前位置P处的纬度、经度和航迹方位角;P′ [X′ Y′]PT为P在极平面的投影;b可由(28)式得出。从北极上空看, 当飞机在极平面等角航线右侧时, ksign=-1, 反之,ksign=1。
3.2 地理系垂直引导算法
地理坐标系垂直引导算法基于力学编排输出的飞机在地理坐标系下的高度、垂速等信息以及航段的高度信息生成垂直引导指令, 引导飞机跟踪垂直航迹, 引导算法如(36)式所示。
 (36)
(36)
式中: 为垂速指令; VGND为飞机地速; h1, h2, hP分别为航段起点、终点、飞机当前位置P点的高度, S, SP分别为总航程、飞机从起点至当前位置P点所经过的航程; kh为增益。
为垂速指令; VGND为飞机地速; h1, h2, hP分别为航段起点、终点、飞机当前位置P点的高度, S, SP分别为总航程、飞机从起点至当前位置P点所经过的航程; kh为增益。
4 极平面等角航线飞行引导仿真
为了验证提出的极平面等角航线飞行引导算法的合理性, 选取一条过极区的大圆航线进行测试。该航线以伦敦希思罗机场(51.47°N, 0.46°E)为起点至俄罗斯楚科奇自治区阿纳德尔机场(64.4°N, 179.32°E)。为突出极区引导效果, 本文仅选取该航线纬度大于88°的大圆航线段进行仿真测试, 该段大圆航线起点A的纬经高坐标为: (88°N, 10.12°E, 8 000 m), 终点B的纬经高坐标为(88°N, 170.44°E, 9 000 m), 并分别用一段极平面等角航线、四段等角航线对该大圆航线段进行近似。大圆航线以及所构造的2条近似航线的空间位置如图 6所示。所选取的大圆航线段的经度、纬度和方位角随航程的变化如图 7所示。图 7表明, 该段大圆航线的方位角变化迅速, 适合作为测试航线。
 |
图6 大圆航线、极平面等角航线、四段等角航线空间位置示意图 |
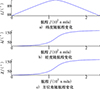 |
图7 大圆航线经度、纬度和实时方位角随航程的变化 |
本次仿真以某型运输机为测试对象, 飞机的飞行速度为150 m/s。分别用等角航线引导算法引导飞机跟踪大圆近似多段等角航线, 用极平面引导算法引导飞机跟踪大圆近似极平面等角航线。本次仿真过程中, 2种引导算法所采用的引导律构型及参数完全一致。所采用的水平引导律构型如(33)式所示, 增益kd=0.025, kχ=0.017。所采用的垂直引导律构型如(36)式所示, 增益kh=0.2。
2种近似航线的水平引导效果分别如图 8~9所示。由于极区大圆航线航向急剧变化, 其拆分的各段等角航线的方位角差异显著增大, 依据(33)式, 飞控计算机解算的滚转角指令将产生大幅跳变, 甚至达到限幅上限。由于飞机具有惯性, 切换航段时无法及时响应快速变化的滚转角指令, 从而因偏离航向而冲出航线, 最终产生巨大的侧偏距。而由于极平面等角航线在极平面投影的方位角为一定值, 不存在指令跳变的问题, 因此使用基于极平面等角航线的水平引导算法引导飞机时, 指令变化更平缓, 飞机跟踪参考航线精度更高。
 |
图8 等角航线水平引导效果 |
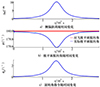 |
图9 极平面等角航线水平引导效果 |
2种近似航线的垂直引导效果如图 10所示。仿真结果表明, 使用等角航线引导算法引导飞机时, 在航段切换的过程中, 飞机由于滚转角大幅振荡导致纵向升力矢量振荡, 从而产生掉高和高度通道振荡的情况。而使用极平面引导算法能为飞机提供稳定的高精度高度指引。同时,由于极平面等角航线航程比等角航线更短, 飞机能够更快地完成整个航段。
使用2种方法引导飞机的过程中, 侧偏距、航向角偏差、高度偏差的统计数据如表 2所示。由表 2可知, 使用所提方法能在极区为飞机提供更稳定的高精度飞行引导。
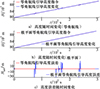 |
图10 2种引导方法的垂直引导效果 |
2种引导方法下侧偏距、航向角偏差、高度偏差的统计数据
为模拟真实飞行情况并测试惯性器件误差对极平面等角航线引导算法和等角航线引导算法的影响, 引入惯导传感器误差并进行1 000次蒙特卡洛仿真。仿真过程中, 陀螺仪和加速度计的性能指标为: 陀螺随机常值漂移0.01°/h, 陀螺随机游走系数0.002°/ , 陀螺刻度系数误差3×10-5, 加速度计随机常值偏置40μg, 加速度计随机游走系数8μg/
, 陀螺刻度系数误差3×10-5, 加速度计随机常值偏置40μg, 加速度计随机游走系数8μg/ 。每次仿真过程中记录下该次仿真过程中飞机的最大侧偏距、最大航向角偏差。
。每次仿真过程中记录下该次仿真过程中飞机的最大侧偏距、最大航向角偏差。
1 000次仿真中,飞机在2种引导算法下的最大侧偏距、最大航向角偏差的统计结果如图 11~12所示。仿真结果表明,相较于等角航线引导算法,使用基于极平面等角航线的水平引导算法引导飞机时,平均最大侧偏距可减小99.6%,平均最大航向角偏差可减小98.1%,且数据更为集中。这是由于四段等角航线的方位角各不相同,且曲率很大,定位上的误差可能导致计算的侧偏距和方位角误差增大,特别是航段切换过程中,由于存在航向角的大幅跳变,定位上的误差可能导致航段提前切换,使得飞机提前大幅转弯,导致航向角、侧偏距振荡。因此在极区传统等角航线引导算法对定位误差非常敏感。而极平面引导算法的航向角指令始终为常数,对定位误差不敏感,能够为飞机提供稳定的高精度飞行引导。
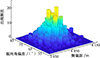 |
图11 1 000次仿真中等角航线引导算法下飞机的侧偏距、航向角偏差统计数据 |
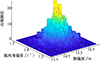 |
图12 1 000次仿真中极平面引导算法下等角航线引导算法下飞机的侧偏距、航向角偏差统计数据 |
5 结论
本文为了解决传统用大圆航线近似等角航线的飞行引导算法在极区引导效果变差的问题,提出了一种基于极平面等角航线的飞行引导方法。首先,定义了极平面并通过极平面参数投影转换算法将力学编排的输出均投影到极平面上。同时定义了极平面等角航线并根据航段信息解算极平面等角航线的球面方程,将该球面航线投影到极平面以解算极平面等角航线投影的平面方程。数值计算和仿真结果表明所提极平面等角航线兼具大圆航线航程短和等角航线方位角不变的优点,充分利用了极平面等角信息,提高了引导精度和稳定性。最后,提出了极平面飞行引导算法并以某型运输机为测试对象进行了典型极区大圆航线仿真飞行测试。仿真结果表明,本文提出的引导方案能够在极区实现高精度飞行引导。需要注意的是,本文所提的引导算法能保证飞机以较高精度沿一段极平面等角航线飞行,但飞机存在航段切换时,限于篇幅,本文未对大圆航线切换时极区引导算法进行探讨。同时,基于WGS-84参考旋转椭球体的更精确的极平面等角航线方程以及与之匹配的更精准的极平面引导算法也是本文未来研究的目标。
References
- Cui W T, Ben Y Y, Zhang H X. A review of polar marine navigation schemes[C]//2020 IEEE/ION Position, Location and Navigation Symposium, Portland, 2020: 851–855. [Google Scholar]
- Sun J, Ma S, Wang J, et al. Reconciliation problem in polar integrated navigation considering coordinate frame transformation[J]. IEEE Trans on Vehicular Technology, 2020, 69(9): 10375–10379 [Article] [Google Scholar]
- Zeng Junbao, Li Shuo, Liu Ya. Application of unmanned underwater vehicles in polar research[J]. Advances in Polar Science, 2021, 32(3): 173–184 [Google Scholar]
- Qin Fangjun, Chang Lubin, Li An. Improved transversal polar navigation mechanism for strapdown INS using ellipsoidal earth model[J]. Journal of Navigation, 2018, 71(6): 1460–1476 [Article] [Google Scholar]
- Li J, Gao J, Liang Z, et al. Analysis of polar region navigation algorithm of laser gyro single-axis rotation modulation inertial navigation[C]//2021 International Conference on Mechatronics, Automation and Intelligent Control, Kunming, China, 2022: 012030. [Google Scholar]
- Yan Zheping, Wang Lu, Zhang Wei, et al. Polar grid navigation algorithm for unmanned underwater vehicles[J]. Sensors, 2017, 17(7): 1599 [Article] [Google Scholar]
- Zhao Wangyang, Zhang Guangtuo, Liu Wei, et al. Working performance analysis on polar navigation of semi-analytical inertial navigation system[C]//2021 IEEE Conference on Telecommunications, Optics and Computer Science, Shenyang, China, 2021: 114–118. [Google Scholar]
- Liu Wenchao, Bian Hongwei. Polar grid rumble route based on polar stereographic projection[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(1): 18–23 (in Chinese) [Google Scholar]
- Cheng Yan, Zhou Qi. Test validation of indirect grid inertial navigation mechanization[C]//6th Conference on Signal and Information Processing, Networking and Computers, Guiyang, China, 2019: 409–419. [Google Scholar]
- Sun L J, Zhang W L, Chen Y X, et al. Based on grid reference frame for SINS/CNS integrated navigation system in the polar regions[J]. Complexity, 2019(1): 2164053 [Google Scholar]
- Ben Y, Cui W, Li Q. An improved damper method for grid inertial navigation system in polar region[J]. IEEE Trans on Instrumentation and Measurement, 2022, 71: 1–13 [NASA ADS] [Google Scholar]
- Zhou Qi, Qin Yongyuan, Fu Qiangwen, et al. Grid mechanization in inertial navigation systems for transpolar aircraft[J]. Northwestern Polytechnical University, 2013, 31(2): 210–217 [Article] (in Chinese) [Google Scholar]
- Ji Saokang, Sha Shaolin, Gao Fengjuan. Research on inertial navigation error algorithm for polar grid in ECEF coordinate positioning[J]. Aeronautical Computing Technique, 2023, 53(5): 57–61 (in Chinese) [Google Scholar]
- Xu Xiang, Wu Zijing, Yao Yiqing, et al. In-motion polar alignment method with unified navigation mechanization and transverse virtual polar region technology[J]. IEEE Trans on Instrumentation and Measurement, 2025, 74: 1–13 [Google Scholar]
- Zhou X, Zhao J, Chang Y. Polar transverse SINS/DVL/GNSS integrated navigation algorithm based on federated filtering[C]//2025 5th International Conference on Mechanical, Electronics and Electrical and Automation Control, Chongqing, China, 2025: 311–316. [Google Scholar]
- Liu Meng, Li Guangchun, Gao Yanbin, et al. Improved polar inertial navigation algorithm based on pseudo INS mechanization[J]. Aerospace Science and Technology, 2018, 77: 105–116 [Article] [Google Scholar]
- Zhang Yongjian, Wang Lin, Wei Guo, et al. Polar region integrated navigation method based on covariance transformation[J]. Applied Sciences-Basel, 2021, 11(20): 9572 [Article] [Google Scholar]
- Cohen Nadav, Klein Itzik. Inertial navigation meets deep learning: a survey of current trends and future directions[J]. Results in Engineering, 2024, 24: 103565 [Article] [Google Scholar]
- Li Zhexin, Li Bing, Zhang Xinmin, et al. Polar integrated navigation algorithm based on transverse earth coordinate system[C]//38th Youth Academic Annual Conference of Chinese Association of Automation, Hefei, China, 2023: 363–369. [Google Scholar]
- Cheng Haibin, Lu Hao, Xu Jianyun. A polar navigation algorithm of strapdown inertial navigation system under frozen geography frame[J]. Chinese Space Science and Technology, 2020, 40(2): 35–41 (in Chinese) [Google Scholar]
- Li Qian, Ben Yueyang, Yu Fei, et al. Transversal strapdown INS based on reference ellipsoid for vehicle in the polar region[J]. IEEE Trans on Vehicular Technology, 2016, 65(9): 7791–7795 [Article] [Google Scholar]
- Yao Yiqing, Xu Xiaosu, Li Yao, et al. Transverse navigation under the ellipsoidal earth model and its performance in both polar and non-polar areas[J]. Journal of Navigation, 2016, 69(2): 335–352 [Article] [Google Scholar]
- Li Guangwei, Zhai Shaobo, Jia Qiuling. Civil airliner flight guidance technology for four-dimensional trajectory-based operation[M]. Beijing: Publishing House of Electronics Industry, 2023 (in Chinese) [Google Scholar]
- Yang L, Zhai S B, Li G W, et al. Generation of guidance commands for civil aircraft to execute RNP AR approach procedure at high plateau[J]. Aerospace-Basel, 2023, 10(5): 396 [Article] [Google Scholar]
- Qin Yongyuan. Inertial navigation[M]. Beijing: Science Press, 2020 (in Chinese) [Google Scholar]
- Wen Chaojiang, Bian Hongwei, Chen Qiu, et al.. Error analysis of polar projection based on double polar stereographic projection[J]. Hydrographic Surveying and Charting, 2015, 35(1): 34–37 (in Chinese) [Google Scholar]
- Li G W, Zhai S B, Jia Q L. Civil airliner flight guidance technology for four-dimensional trajectory-based operation[M]. Singapore: Springer, 2025: 103–115 [Google Scholar]
All Tables
All Figures
|
图1 极平面及极平面坐标系定义 |
| In the text | |
|
图2 大圆航线在极平面投影及关键向量示意图 |
| In the text | |
|
图3 极平面等角航线示意图 |
| In the text | |
|
图4 大圆航线、极平面等角航线、十段等角航线的经纬度变化 |
| In the text | |
|
图5 极平面等角航线在极平面上的方位角、大圆航线和十段等角航线的方位角随航程的变化 |
| In the text | |
|
图6 大圆航线、极平面等角航线、四段等角航线空间位置示意图 |
| In the text | |
|
图7 大圆航线经度、纬度和实时方位角随航程的变化 |
| In the text | |
|
图8 等角航线水平引导效果 |
| In the text | |
|
图9 极平面等角航线水平引导效果 |
| In the text | |
|
图10 2种引导方法的垂直引导效果 |
| In the text | |
|
图11 1 000次仿真中等角航线引导算法下飞机的侧偏距、航向角偏差统计数据 |
| In the text | |
|
图12 1 000次仿真中极平面引导算法下等角航线引导算法下飞机的侧偏距、航向角偏差统计数据 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.