| Issue |
JNWPU
Volume 44, Number 1, February 2026
|
|
|---|---|---|
| Page(s) | 92 - 101 | |
| DOI | https://doi.org/10.1051/jnwpu/20264410092 | |
| Published online | 27 April 2026 | |
Two-layer path planning algorithm for multiple UAVs in urban combat
城市环境下多无人机双层路径规划算法
School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China
Received:
14
June
2025
Abstract
In response to the challenges of multiple unmanned aerial vehicles'(UAV) rapid strike missions against multiple enemy targets in a complex urban combat environment, where the optimization of multiple objectives such as energy consumption, flight risk and inter-UAV safety distance must be considered, this paper proposes a two-layer optimization algorithm based on the A* algorithm and the improved particle swarm optimization(PSO) algorithm. The method utilizes the A* algorithm to generate initial paths, which serve as initial solutions for the PSO algorithm, thereby enhancing the early-stage search efficiency. Meanwhile, a particle mechanism with mutation structures is introduced to improve the global search capability of the PSO algorithm in its solution space and to mitigate premature convergence. The simulation results demonstrate that the proposed two-layer optimization algorithm signi-ficantly improves search efficiency and effectively addresses the problem of local optima. The findings verify the feasibility and effectiveness of the proposed algorithm in multi-UAV path planning tasks in a complex urban combat environment.
摘要
针对复杂城市作战环境下多无人机对敌多目标快速打击任务中需同时考虑能耗、飞行风险及安全距离等多种优化指标, 现有算法在路径规划中存在搜索速度慢、易陷入局部最优等问题, 提出一种基于A*算法与改进粒子群算法(PSO)的双层优化方法。该方法利用A*算法生成初始路径, 作为粒子群算法的初始解, 提升搜索初期的效率; 同时引入带变异结构的粒子机制, 增强粒子群在解空间中的全局搜索能力, 有效缓解早熟收敛问题。仿真实验结果表明, 该双层优化算法在提升搜索效率的同时, 显著改善了陷入局部最优的问题。研究结果验证了所提算法在复杂城市环境下多无人机路径规划任务中的可行性和有效性。
Key words: multiple UAVs / path planning / improved particle swarm algorithm / A* algorithm
关键字 : 多无人机 / 路径规划 / 改进粒子群算法 / A*算法
© 2026 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
在军事行动中, 无人机(unmanned aerial vehicle, UAV)作为新型无人化装备被广泛运用于现代军事战场[1], 具备机动性高、灵活性强、成本低廉、隐蔽性强等[2]特点, 在作战侦察与打击领域发挥着重要作用[3]。UAV路径规划是实现UAV自主飞行、完成侦察或打击任务的关键技术之一[4]。在复杂的城市环境中[5], 为了快速实现多目标打击并削弱敌方反击能力, 需要运用多无人机协同, 对敌方目标进行打击, 旨在有效削弱敌方目标体系的综合能力。
由于城市环境中存在大量建筑物遮挡, 在城市环境中进行多无人机协同多目标打击任务面临诸多挑战[6]。在执行多目标打击任务过程中, 多无人机不仅需要考虑任务执行时间, 还要综合分析飞行过程中的地理环境信息和无人机间的安全距离等因素。
针对多无人机协同航迹规划问题, 国内外学者进行了大量研究。现有的无人机路径规划算法主要分为经典算法和智能优化算法等。经典算法主要包括A*算法[7-8]、人工势场法[9-10]、概率路标图[11-12]及快速搜索随机树[13-14]等。这些算法在单无人机路径规划中表现良好, 但在多约束条件下难以应用于多无人机路径规划。而智能优化算法可以有效求解复杂的组合优化问题[15]。文献[16]提出了一种基于多群果蝇优化算法(MSFOA)的路径规划方法, 旨在解决原始果蝇优化算法在处理多无人机路径规划时存在的全局收敛速度慢、容易陷入局部最优的问题。将果蝇群体划分为多个子群, 每个子群执行不同的任务, 从而扩展搜索空间并提高算法的全局和局部搜索能力。文献[17]为解决传统路径规划算法在复杂城市环境中处理无人机战术路径规划时面临局部最优解和收敛速度慢等问题, 提出了一种改进的灰狼优化算法, 结合了莱维飞行随机策略和共生生物搜索算法, 提高算法的全局寻优能力并加速收敛。文献[18]为了应对传统蚁群优化算法(ACO)收敛速度慢和容易陷入局部最优的局限性, 提出在动态环境下使用最大最小蚁群优化算法(MMACO)与差分进化算法(DE)相结合的方法, 解决多无人机协同路径规划问题。文献[19]基于模仿鲣鸟(Booby bird)的觅食行为设计一种新的启发式算法, 应用于多无人机路径规划中, 旨在解决多无人机路径规划中的碰撞避免、能源消耗优化以及任务分配问题。
当前的多无人机路径规划问题仍存在2点挑战: ①现有算法所用的地图环境相对简单, 大多采用简单的圆形威胁区域, 难以真实反映复杂城市环境; ②多数研究集中于多无人机单目标路径规划, 而多目标路径规划在多约束条件下是一个复杂的多目标优化问题, 涉及能耗、飞行约束和多源威胁约束等因素, 需通过构建相应的模型加以解决。
针对上述问题, 本文提出了一种基于A*算法和改进粒子群算法的双层优化算法。其中, A*算法能够保证找到目标起点到终点的最优路径, 并可通过调整启发函数在计算速度和准确性之间进行平衡。粒子群算法[20]具有结构简单、调节参数少、适于在连续空间中进行搜索等特点, 通过群体之间的信息共享优化解决方案, 不依赖于问题的可微性或梯度信息, 在解决复杂的非线性问题时, 具有良好的搜索能力。本文方法充分发挥了A*算法在单目标路径规划中的优势, 以及改进粒子群算法在处理多约束条件下的强大能力。最终通过仿真实验验证了本文方法的有效性及优越性。
本文的主要创新点如下:
1) 构建面向多无人机协同路径规划的综合适应度函数: 针对多无人机在复杂环境下路径规划过程中存在的能耗约束、威胁规避以及机动特性等问题, 本文设计了一种综合适应度函数。该函数在建模层面同时刻画能耗代价、威胁代价和转弯代价等关键指标, 为算法优化提供了科学、全面的评价标准。
2) 提出双层路径规划求解框架: 在优化目标体系确定的基础上, 进一步构建了一个双层路径规划框架。该框架通过将A*算法与改进的粒子群算法相结合, 利用A*算法在单目标路径搜索中的确定性优势与粒子群在多目标优化中的全局搜索能力互补, 有效提升了解空间搜索效率和解的全局性, 从算法结构层面实现了性能优化。
3) 改进了粒子群优化算法: 引入A*算法解作为粒子初始解后, 虽然显著提高了粒子群算法的搜索效率, 但也容易导致算法过快收敛, 陷入局部最优解的困境。为解决这一问题, 本文提出了一种带有变异机制的局部最优(LBEST)信息交流结构的粒子群算法(PSO)。该算法有效增强了粒子群在特定区域内的搜索能力, 从而获得更优质的解。
1 模型构建与适应度函数设计
1.1 城市模型构建
本文主要考虑多无人机在复杂城市环境中的路径规划任务, 并使用栅格法对周围环境进行描述, 将城市环境构建成一个栅格三维环境。通过三维栅格地图描述城市中的障碍物。
城市三维环境示意图如图 1所示。
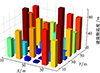 |
图1 城市三维环境示意图 |
图 1中不同高度的长方体表示不同高度的城市建筑物, 在多无人机联合打击多目标任务中, 无人机将保持超低空的飞行高度向目标位置前进。因此, 无人机固定在某一高度后, 城市三维环境示意图将转换为多无人机在三维环境的某一平面下的路径规划问题。简化后的城市环境示意图如图 2所示。
 |
图2 城市二维环境示意图 |
1.2 适应度函数设计
路径表示在路径规划问题中尤为关键, 本文使用栅格地图表示环境信息, 一系列离散点信息表示路径, 并最终使用样条曲线生成连续路径信息。
对于多无人机路径规划问题, 适应度函数的设计是评判飞行路径质量好坏的标准, 该函数由一系列的优化目标和约束条件组成。适应度越高, 代表生成的多无人机路径质量越好。
针对多无人机在复杂环境下多目标的路径规划问题, 本文提出了多个目标函数, 并通过计算多种目标函数之和生成适应度函数。
本文中的适应度函数由多无人机的能耗代价Jlength、威胁代价Jthreat以及转向代价Jturn共同组成。
 (1)
(1)
以下分别介绍多无人机的能耗代价Jlength、威胁代价Jthreat和转向代价Jturn。
1) 能耗代价Jlength
多无人机系统的能耗代价主要由各个无人机的累计飞行路径长度决定。本文中, 第i架无人机最终路径由n个离散点[p1i, p2i, …, pni]表示, 因此, 多无人机的能耗代价Jlength可按照(2)~(3)式计算。
 (2)
(2)
 (3)
(3)
式中:NUAV表示无人机的数量;n表示组成无人机路径的离散点数量;‖·‖表示求取2个点之间的欧式距离; Jlengthi表示第i架无人机的路径长度。
2) 威胁代价Jthreat
多无人机威胁代价Jthreat主要来自于环境障碍物威胁Jobs、敌方防御实体威胁Jenemy、多无人机之间威胁JUAV。因此威胁代价Jthreat组成如(4)式所示。
 (4)
(4)
(1) 障碍物威胁Jobs
将构成路径的离散点连接后生成连续的第i架(i=1, 2, …, NUAV)无人机路径, 在此路径上取间隔为d的li个采样点[o1, o2, …, oli], 计算这些点与障碍物之间的距离, 生成碰撞威胁Jobs, 如图 3所示。
 |
图3 无人机路径障碍物威胁计算示意图 |
图 3中, dk表示第k个采样点与障碍物之间的距离。
Jobs的计算公式如下所示。
 (5)
(5)
 (6)
(6)
 (7)
(7)
式中:li表示无人机i生成的路径采样点数目;[]表示取整符号;dki表示无人机i的第k个采样点oki与障碍物的距离;ωobs表示障碍物威胁系数;fobs()表示截断函数, 当路径上采样点与障碍物的距离小于2 m的时候, 表示存在碰撞威胁, 距离越小, 表示威胁越大。
(2) 敌方防御实体威胁Jenemy
除了与障碍物发生碰撞带来的威胁之外, 还存在敌方防御实体给无人机带来的威胁, 敌方威胁Jenemy可以通过采样点[o1, o2, …, ol]与不同的敌方防御实体的距离计算, 如图 4所示。
 |
图4 无人机路径障碍威胁计算示意图 |
图 4中, ejk表示第k个采样点与敌方防御实体j之间的距离。
Jenemy计算公式如下所示。
 (8)
(8)
 (9)
(9)
 (10)
(10)
式中:[·]表示取整符号;ejk表示无人机i的第k个采样点oki与敌方防御实体j的距离;ωenemy表示敌方防御实体威胁系数;fenemy(·)表示截断函数。当采样点k与敌方防御实体j的距离小于其最大威胁距离emaxj的时候, 表示存在威胁, 距离越小, 表示无人机受到威胁越大。
(3) 无人机之间的碰撞威胁JUAV
为避免多无人机在执行任务过程中发生碰撞, 需保证在同一时间段内, 不同无人机路径上采样点之间保持足够的安全距离。考虑到本文假设所有无人机均以恒定速度飞行, 且路径采样点间距设为固定值d, 可以将序号相近的采样点视为处于同一时间段的飞行位置。若此类采样点之间的距离大于预设的安全阈值, 则认为2架无人机在该时间段内能够保持安全间隔。最终, 多无人机路径之间的碰撞威胁JUAV的计算公式为:
 (11)
(11)
 (12)
(12)
式中, ωUAV表示无人机之间碰撞威胁系数;fUAV(·)表示截断函数;oki表示第i架无人机的第k个采样点;ouj表示第j架无人机的第u个采样点;‖·‖表示求取2个点之间的欧式距离。当不同无人机采样点的序号间隔小于no并且它们之间间距小于do时, 无人机之间存在碰撞的可能, 采样点之间的距离和序列间隔越小, 碰撞的概率越高。
3) 转向代价Jturn
为提升无人机飞行的连贯性, 需考虑无人机的航向角变换约束。Jturn的计算公式为:
 (13)
(13)
 (14)
(14)
 (15)
(15)
式中:ωturn表示转向代价的权重系数;n表示组成无人机路径的离散点数量;nij表示无人机i经过离散路径点j时的航向角变化的绝对值;θmax为航向角变化的阈值, 航向角变化超过该阈值, 则计入转弯代价。航向角变化越大, 转弯代价越高。
2 双层路径规划算法
在复杂城市环境下进行多无人机的路径规划任务时, 需要同时优化多条无人机路径。此时如果直接使用粒子群算法在解空间中进行大范围搜索, 容易收敛到局部最优解。为此本文提出了融合A*算法和改进粒子群算法的双层多无人机路径规划算法, 该方法能够显著提升求解效率。
2.1 总体框架
针对复杂城市环境下的多无人机路径规划问题, 本文建立了双层路径规划算法, 将多无人机路径任务分成两部分。顶层A*算法生成单无人机与其目标之间的路径, 此时的路径仅考虑避免与障碍物发生碰撞。底层改进粒子群算法将顶层A*算法生成的路径信息作为参考路径用于部分粒子的初始值。双层路径规划的总体框架如图 5所示。
 |
图5 双层路径规划算法总体框架 |
2.2 A*算法
A*算法是经典的启发式算法之一, 通过加入启发式函数使自身搜索方向更加清晰。该算法综合了最良优先搜索[21]和Dijkstra算法[22]的优点: 在通过启发式搜索提高算法效率的同时, 可以保证找到一条最优的路径。
A*算法的评估函数如(16)式所示。
 (16)
(16)
式中:g(p)表示从起点到任意顶点p之间的实际距离; h(p)表示任意顶点p到目标点的估算距离。
当g(p)等于0的时候, 即只计算任意顶点p到目标的评估函数h(p), 起点到目标点的距离不起作用, 此时算法转化为最优优先搜索, 速度最快, 但可能无法获得最优解; 当h(p)取值不大于点p到目标点之间的实际距离时, A*算法最终一定能得到最优解。h(p)取值越小, 需要计算的节点就越多, 算法计算效率降低。常见的评估函数有欧几里得距离、曼哈顿距离、切比雪夫距离。本文采用的是曼哈顿距离; 当h(p)取值为0的时候, 即只计算起点到任意顶点p到目标的最短路径g(p), 此时算法转化为Dijkstra算法, 需要计算的顶点最多。
2.3 改进粒子群算法
粒子群优化算法是一种基于群体智能的全局优化技术。传统的PSO采用全局最佳(GBEST)信息交流结构, 每个粒子依据整个群体的全局最优位置进行更新。因此, GBEST结构在处理复杂的多无人机路径规划问题时, 容易导致算法早熟收敛。为了增强PSO算法的局部搜索能力, 本文采用局部最佳(LBEST)信息交流结构的PSO算法。在LBEST结构中, 每个粒子仅与其局部邻域中的粒子交换信息, 其位置更新不仅依赖于自身的历史最优位置, 还受限于邻域内粒子的最优位置。通过引入局部环形拓扑, 在优化中维持粒子群的多样性。
LBEST-PSO算法与GBEST-PSO算法在粒子的速度更新上存在一定差异, 其速度更新公式为
 (17)
(17)
式中:[ω, c1, c2]分别表示惯性权重、个体学习系数和群体学习系数;vijt是t时刻粒子i在维度j上速度;rand()表示[0, 1]上的随机数字;pijt是t时刻粒子i在维度j的个体最优位置;pgjt是该粒子在其环形拓扑邻域中局部最优的位置。
LBEST-PSO算法位置更新公式为
 (18)
(18)
式中, xijt是t时刻粒子i在维度j上的位置。
LBEST-PSO算法相比经典的PSO算法引入了局部环形拓扑结构, 提升了粒子群的多样性, 降低了LBEST-PSO算法在解决NP难题时候陷入局部最优的可能性。然而, 面对多无人机协同路径规划问题时, 粒子搜索的空间巨大。因此仍然难以求解出符合需求的解。
引入A*算法生成的无人机路径作为LBEST-PSO算法初始解后, 能够大大提升LBEST-PSO算法的搜索效率, 降低搜索难度。但与此同时, 算法将更快地收敛到次优解, 降低搜索过程中粒子的多样性。因此, 本文在LBEST-PSO算法的基础上设计了带有变异结构的粒子, 使其在搜索过程中以一定的概率发生突变。并与自适应惯性权重相结合, 在算法早期阶段,较大的惯性权重和较高的变异概率鼓励粒子在更大的范围内进行搜索, 避免陷入局部最优解。在算法后期, 较小的惯性权重和较低的变异概率使得粒子进行更细致的局部搜索, 帮助找到更细致的最优解。
改进后的LBEST-PSO算法流程图如图 6所示。
 |
图6 改进粒子群算法流程图 |
其中, 主要改进的步骤为: ①使用A*算法初始化粒子群; ②设计了带有变异结构的粒子。
1) 基于A*算法的初始化粒子群
A*算法在栅格地图环境中生成的无人机到目标位置的路径点Si=[a1i, a2i, …, anaii]。其中, nai表示无人机i到目标点所经过的栅格数目。
粒子x初始值由NUAV个无人机的离散路径点共同组成, 其设定(19)式所示。
 (19)
(19)
其中, 无人机i的离散路径点[p1i, p2i, …, pni]是从Si=[a1i, a2i, …, anaii]中按顺序随机选取n个点生成。
2) 带有变异结构的粒子
在粒子x数据中根据(20)~(23)式加入变异值。
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
式中:rand(·)表示[0, 1]上的随机数字;pki表示第i架无人机的第k个离散路径点;I表示当前迭代次数;Imax表示最大迭代次数;xp为服从均值为0, 方差为σ2的正态分布随机数。本文中, σ设置为粒子取值范围的0.1倍。
3 仿真实验及分析
3.1 仿真环境与参数设置
为验证本文提出算法在多无人机环境下进行多目标路径规划时的有效性, 设计了90 m×100 m和154 m×216 m不同大小的仿真场景。实验中, 栅格地图的单位尺寸为1 m×1 m。具体场景如图 7所示。
 |
图7 仿真环境 |
图 7中, 蓝色的点表示不同无人机的起始位置, 红色的点表示无人机的目标位置, 图中浅红色的区域表示敌方威胁区域。
在案例1和案例2中, 设定无人机的路径点采样间隔d为2 m。目标函数中, 障碍物威胁系数ωobs设置为3, 敌方防御实体威胁系数ωenemy设置为1, 无人机之间碰撞威胁系数ωUAV设置为5, 转向代价的权重系数ωturn设置为1。考虑案例1和案例2地图大小和无人机路径点的采样间隔, 无人机碰撞威胁中无人机采样点的序号间隔no设定为10, 它们之间的间距do设定为5 m。
本文算法的训练平台为PyCharm, CPU为i7-12700H。在同一实验条件下对比全局最佳信息交流结构的粒子群算法(GBEST-PSO)、局部最佳信息交流结构的粒子群算法(LBEST-PSO)、基于A*算法的LBEST-PSO算法(A* based LBEST-PSO, ALPSO)及基于A*算法的改进LBEST-PSO算法(A* based improved LBEST-PSO, AILPSO)。最大迭代次数为2 000, 种群规模为70, 在案例1中每个无人机的离散路径点为8个, 在案例2中每个无人机的离散路径点为10个。所有粒子群算法的个体学习因子c1和群体学习因子c2均设定为1.496, 惯性权重ω的值随迭代次数线性变化, 如(24)式所示。
 (24)
(24)
案例1和案例2中的位置信息设置如表 1所示; 敌方防御实体的参数设置如表 2所示。
无人机位置与其目标位置信息
敌方防御实体信息
3.2 仿真结果对比
在案例1和案例2中, 不同算法在同一实验条件下进行50次仿真实验得到的收敛曲线如图 8~9所示。在案例1和案例2收敛曲线中, 实线表示50次独立运行过程中每种算法的平均适应度值, 实线对应的阴影区域则表示适应度值的波动范围, 反映出算法在不同实验条件下的稳定性。从收敛曲线的对比分析可以看出, GBEST-PSO和LBEST-PSO算法在初始阶段适应度随显著高于引入A*算法的ALPSO和AILPSO算法, 且算法的收敛速度较快, 容易收敛到局部最优解。
 |
图8 案例1中不同算法的收敛曲线 |
 |
图9 案例2中不同算法的收敛曲线 |
引入A*算法后, ALPSO和AILPSO算法在初始阶段能够迅速在搜索空间中选择合适位置展开搜索。相较于ALPSO算法, 引入变异结构的AILPSO算法增强了早期阶段的探索能力, 使其在迭代初期能够更充分地探索解空间, 从而避免陷入局部最优解。在案例1中, 由于搜索空间相对较小, ALPSO和AILPSO算法在50次运行后的最优适应度值非常接近。然而, ALPSO的平均适应度值略高于AILPSO, 表明在该有限空间内, ALPSO可能更易于收敛到局部最优解, 而AILPSO则展现出更强的局部搜索能力, 以较高概率找到更优解; 在案例2中, 随着问题规模和搜索空间的增大, AILPSO算法在前期探索阶段优势更为明显。其粒子的变异机制使得算法能够更好地探索未知区域, 避免算法在早期过快收敛到局部最优解。50次运行后的结果表明, AILPSO在搜索大规模空间时, 其最优适应度值和平均适应度值均优于ALPSO, 体现了该算法在复杂问题环境下有更好的适应性和鲁棒性。
这几种算法的统计结果如表 3所示。表 3中列出了不同算法运行50次后得到的适应度均值、适应度标准差、适应度最大值和适应度最小值。为直观展示算法的优劣, 最优统计结果以加粗方式标注。通过对比可以明显看出, 本文提出的AILPSO算法在解决多无人机多目标路径规划问题上展现了显著的优势。其中, 适应度均值反映了算法在总体上的性能表现, 适应度标准差则能够衡量算法在多次运行中的稳定性。在案例1中, AILPSO算法与ALPSO算法相比, 平均适应度减少了5.31%, 标准差降低了28.93%, 表明AILPSO算法不仅提升了性能, 还提高了算法运行的稳定性。在案例2更大的地图环境中, AILPSO算法的整体性能优势进一步扩大, 其平均适应度减少了16.34%, 适应度标准差下降了42.51%, 进一步证明了该算法在不同场景下的高效性和稳定性。
不同算法的计算结果
案例1和案例2中, ALPSO算法和AILPSO算法在最优适应度值下规划出的路径如图 10~11所示。
 |
图10 案例1中不同算法规划的路径 |
 |
图11 案例2中不同算法规划的路径 |
在案例1中, 由于场景相对简单, ALPSO和AILPSO算法在经过50次运行后均能够以最优适应度生成合理的路径, 满足多无人机路径规划的要求。然而, 当案例2时场景复杂度提升, 地图范围更大且环境复杂性显著增加, ALPSO算法生成的路径暴露出一些局限性。具体表现在ALPSO算法生成的路径中, 紫色点标记的部分显示无人机飞行过于接近障碍物, 且存在绕行和多无人机路径重叠的情况。这些问题可能导致任务执行时的风险增加, 并延长飞行时间。相比之下, AILPSO算法在复杂场景中的表现更加优异, 能够有效避开障碍物, 减少绕行, 并生成更加合理的路径, 避免了路径重叠的现象。这表明, AILPSO算法在应对复杂环境时展现出更强的探索能力和算法稳定性, 为多无人机路径规划提供了更为高效和安全的解决方案。
4 结论
本文针对复杂城市环境下多无人机协同的多目标路径规划问题, 提出了一种结合A*算法与粒子群算法的双层路径规划方法。本文所提出的方法充分发挥了A*算法在单目标路径规划中的高效性, 以及改进粒子群算法在处理多目标、多约束条件下在解空间中的搜索能力。并在粒子群算法中引入带有变异结构的粒子, 进一步提高了算法的全局探索能力, 避免了算法过早收敛至局部最优解, 增强了其在复杂环境中的稳健性。仿真实验结果表明, 本文提出的双层优化算法在多无人机协同多目标路径规划中具有较高的搜索效率和优良的适应度表现, 能够有效应对复杂城市环境中的多目标打击任务。未来的研究工作将进一步探索该方法在动态环境中的应用, 以及结合更多实际约束条件以提升其在真实场景中的应用价值。
References
- Zhang Wenchang. UAV application and thinking[J]. Defence Science & Technology Industry, 2023(4): 47–49 (in Chinese) [Google Scholar]
- Gugan G, Haque A. Path planning for autonomous drones: challenges and future directions[J]. Drones, 2023, 7(3): 169 [Article] [Google Scholar]
- Shen Lincheng, Chen Jing, Wang Nan. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593–606 (in Chinese) [Google Scholar]
- Moon S, Jeon J, Kim D, et al. Swarm reconnaissance drone system for real-time object detection over a large area[J]. IEEE Access, 2023, 11: 23505–23516 [Article] [Google Scholar]
- Cai Bowen. Reflections on our army's urban warfare in the battle of Mosul[J]. Military Digest, 2018(13): 71–74 (in Chinese) [Google Scholar]
- Song Y, Xi Q, Xing X, et al. Multi-UAV cooperative multi-target allocation method based on differential evolutionary algorithm[C]//2020 39th Chinese Control Conference, 2020: 1655-1660. [Google Scholar]
- Chen J, Li M, Yuan Z, et al. An improved A* algorithm for UAV path planning problems[C]//2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference, 2020: 958-962. [Google Scholar]
- Bai X, Jiang H, Cui J, et al. UAV path planning based on improved A* and DWA algorithms[J]. International Journal of Aerospace Engineering, 2021(1): 4511252 [Google Scholar]
- Jayaweera H M, Hanoun S. A dynamic artificial potential field(D-APF) UAV path planning technique for following ground moving targets[J]. IEEE Access, 2020, 8192760–192776 [Article] [Google Scholar]
- Guo Yicong, Liu Xiaoxiong, Zhang Weiguo, et al. 3D path planning method for UAV based on improved artificial field[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 977–986 [Article] (in Chinese) [Google Scholar]
- Li Q, Wei C, Wu J, et al. Improved PRM method of low altitude penetration trajectory planning for UAVs[C]//Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference, 2014: 2651-2656. [Google Scholar]
- Li W, Wang L, Zou A,et al. Path planning for UAV based on improved PRM[J]. Energies, 2022, 15(19): 7267 [Article] [Google Scholar]
- Guo Y, Liu X, Liu X, et al. FC-RRT*: an improved path planning algorithm for UAV in 3D complex environment[J]. ISPRS International Journal of Geo-Information, 2022, 11(2): 112 [Article] [Google Scholar]
- Yang F, Fang X, Gao F, et al. Obstacle avoidance path planning for UAV based on improved RRT algorithm[J]. Discrete Dynamics in Nature and Society, 2022(1): 4544499 [Google Scholar]
- Aljalaud F, Kurdi H, Youcef-Toumi K. Bio-inspired multi-UAV path planning heuristics: a review[J]. Mathematics, 2023, 11(10): 2356 [Article] [Google Scholar]
- Shi K, Zhang X, Xia S. Multiple swarm fruit fly optimization algorithm based path planning method for multi-UAVs[J]. Applied Sciences, 2020, 10(8): 2822 [Article] [Google Scholar]
- Lu Ying, Pang Lichen, Chen Yusi, et al. A swarm intelligence algorithm for UAV path planning in urban warfare[J]. Acta Armamentarii, 2023, 44(S2): 146–156 (in Chinese) [Google Scholar]
- Ail Z A, Zhangang H, Zhengru D. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment[J]. Measurement and Control, 2023, 56(3/4): 459–469 [Google Scholar]
- Aljalaud F, Kurdi H, Youcef-Toumi K. Autonomous multi-UAV path planning in pipe inspection missions based on booby beha-vior[J]. Mathematics, 2023, 11(9): 2092 [Article] [Google Scholar]
- Shin J J, Bang H. UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020(1): 8820284 [Google Scholar]
- Dechter R, Pearl J. Generalized best-first search strategies and the optimality of A*[J]. Journal of the ACM, 1985, 32(3): 505–536 [Article] [Google Scholar]
- Sniedovich M. Dijkstra's algorithm revisited: the dynamic programming connexion[J]. Control and Cybernetics, 2006, 35(3): 599–620 [Google Scholar]
All Tables
All Figures
|
图1 城市三维环境示意图 |
| In the text | |
|
图2 城市二维环境示意图 |
| In the text | |
|
图3 无人机路径障碍物威胁计算示意图 |
| In the text | |
|
图4 无人机路径障碍威胁计算示意图 |
| In the text | |
|
图5 双层路径规划算法总体框架 |
| In the text | |
|
图6 改进粒子群算法流程图 |
| In the text | |
|
图7 仿真环境 |
| In the text | |
|
图8 案例1中不同算法的收敛曲线 |
| In the text | |
|
图9 案例2中不同算法的收敛曲线 |
| In the text | |
|
图10 案例1中不同算法规划的路径 |
| In the text | |
|
图11 案例2中不同算法规划的路径 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.