| Issue |
JNWPU
Volume 37, Number 3, June 2019
|
|
|---|---|---|
| Page(s) | 636 - 642 | |
| DOI | https://doi.org/10.1051/jnwpu/20193730636 | |
| Published online | 20 September 2019 | |
Quick Suppression of Vibration of Robot via Hybrid Input Shaping Control Strategy
混和输入整形控制策略快速抑制机器人振动
1
School of Engineering, Huzhou University, Huzhou 313000, China
2
Department of Mechanical Engineering, McGill University, Montreal H3A0C3, Canada
3
Department of mining and Materials Engineering, McGill University, Montreal H3A0C5, Canada
Received:
14
June
2018
Abstract
When the vibration amplitude and resonant frequency bandwidth of each mode are different in the multiple-modal system, the response time of a system is increased but the residual vibration is effectively reduced by the positive impulses multiple-modal input shapers. However, a negative impulses hybrid multiple-modal input shaping method can solve those problems. The basic principle of this control strategy and a 3-DOF parallel robot were introduced. Six negative impulses hybrid input shapers to reduce vibration of the first two modes were constructed based on the robot. Using simulation methods, the response time and vibration suppression abilities of various negative impulses hybrid two-modal input shapers (NHTIS) were obtained by analyzing the vibration response curves of these input shapers, and comparing with positive and negative impulses two-modal input shapers, respectively. The results show that the NHTIS can improve the response speed of the system while significantly reducing the multiple-modal residual vibration.
摘要
当多模态系统中各个模态的振动幅度和共振频带宽度差异明显时,正脉冲多模态输入整形器在有效减小残余振动的同时却增加了系统响应时间,而负脉冲混合多模态输入整形方法可解决该问题。介绍了其控制策略的基本原理和一个3-DOF并联机器人,并构造6种减小该机器人前2个模态振动的负脉冲混合输入整形器。使用仿真获得了各种负脉冲混合两模态输入整形器(NHTIS)的振动响应曲线,分析了其响应时间和抑制振动的能力,并分别与正脉冲、负脉冲两模态输入整形器对比。结果表明NHTIS能在减小多模态残余振动的同时提高系统响应速度。
Key words: input shaping / multiple-modal / negative impulse / hybrid vibration control / robot
关键字 : 输入整形 / 多模态 / 负脉冲 / 混合振动控制 / 机器人
© 2019 Journal of Northwestern Polytechnical University. All rights reserved.
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
在制造领域中,机器人、多关节运动机构、微机电系统等设备的移动速度和精度是极为重要的评价指标。并联机器人具有较好的系统刚度和运动稳定性,常被使用在运动精度较高的场合,但移动时会出现残余振动,随着运动速度的提升而残余振动越发明显,直接影响其运动精度[1]。输入整形控制策略是一种能抑制残余振动的有效方法[2-3],它是根据系统的固有频率和阻尼比计算出一些调节脉冲,并与系统的输入信号进行卷积操作,形成新的输入信号输出给执行元件,从而降低系统的残余振动。这种方法既可使用到单模态系统,也可使用到多模态系统中,即可减小单自由度简单机构的残余振动,也可减小多关节机器人或非线性系统的残余振动[4-6]。普通多模态输入整形器是利用各阶振动参数建立一些相同类型的单模态输入整形器后合并而成[7],其构造简单,可同时有效抑制多个模态的残余振动,但增加了系统响应的时间延迟,可使用负脉冲构建多模态输入整形器以提高系统响应时间[8-9]。此外,当一个多模态系统各阶的振动幅度和所需要抑制振动的频带宽度差异明显时,一般控制策略的抑振能力明显降低,可应用正脉冲混合多模态输入整形控制策略,但会造成系统响应的时间延迟较大[7]。针对这种缺陷,根据每阶模态的振动特性构建最适合该阶模态的单模态负脉冲输入整形器,然后构建一种基于负脉冲的混合型多模态输入整形器。
1 并联机器人
一种三自由度(3-DOF)并联机器人如图 1所示。
并联机器人由3组直线移动机构在同一平面上对称布置而成,每组直线移动机构包括伺服电机、柔性连杆、滚珠丝杠导轨、滑块和2个旋转关节,且每个柔性连杆均连接到一个等边三角形的末端移动平台,从而形成一个并联机器人,该机器人可实现沿X、Y轴的移动和绕着垂直于XY平面法线的转动,其主要零部件的尺寸和材料参数见表 1[5]。
根据动力学方程可得柔性连杆之间相互作用的受力关系[10]。通过实验可得3-DOF机器人柔性连杆前2个模态的固有频率和阻尼比,如表 2所示[5, 10]。
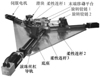 |
图1 3-DOF并联机器人 |
主要零部件的尺寸和材料参数
固有频率和阻尼比
2 输入整形控制策略原理
2.1 单模态输入整形
输入整形控制策略是将一组脉冲与输入信号卷积而改变输入信号, 使产生的驱动力抵消系统的残余振动[5]。这些脉冲的作用时间和脉冲的幅值直接影响系统响应时间和减振效果。对于单模态系统, 各脉冲的幅值及作用时间可利用固有频率和阻尼比的相关计算而得, 根据约束方程(1), 系统在这些脉冲依次作用下, 其残余振动为零[5]。
 1
1
式中
 2
2
式中, ω, ζ分别代表系统的角频率和阻尼比, Ai和ti代表第i个脉冲的幅值和作用时间。为了提高输入整形器的系统响应速度, 并减小脉冲幅值对残余振动的影响, 使第一个脉冲的作用时间为0, 并使全部脉冲的幅值之和为1, 当所有脉冲的幅值都为正值时, 称为正脉冲输入整形器, 其基本类型为ZV, 而ZVD可提高不灵敏度, EI具有更高的不灵敏度[5]。
当输入整形器的脉冲包含负值时, 称为负脉冲输入整形器, 负脉冲输入整形器的响应速度比正脉冲输入整形器更快, 且输入整形器的不灵敏度也随之增加[11]。负脉冲输入整形器同时包含正脉冲和负脉冲, 其任意相连脉冲的幅值之和小于等于第一个脉冲幅值Q, 在各个脉冲作用过程中, 为减小系统振动的幅值, 令Q=1。负脉冲输入整形器的种类有NZV、NZVD和NEI, NZV的系统响应速度最快, 而NEI具有最高的不灵敏度[11]。
2.2 多模态输入整形
多模态输入整形控制策略是先根据各阶模态的固有频率和阻尼比建立对应模态的单模态输入整形器, 然后将它们卷积, 即获得多模态输入整形器。正脉冲多模输入整形器是全部由单模态正脉冲输入整形器构建而成, 其类型包括ZV-ZV, ZVD-ZVD和EI-EI[7]。它们能同时减小系统多阶的残余振动, 然而响应速度慢。对于正脉冲多模态输入整形器, ZV-ZV响应最快, 但不灵敏度最低; 而EI-EI响应最慢, 但不灵敏度最好[7]。
为提高正脉冲多模态输入整形器的响应速度, 可使用负脉冲构建负脉冲多模态输入整形控制策略, 该方法是将各个负脉冲单模态输入整形器进行卷积计算而构成的, 例如前两个模态的负脉冲单模态输入整形器分别为
 3
3
式中, ANZV1k, tNZV1k, ANZV2k, tNZV2k分别为脉冲的幅值和作用时间, k为脉冲数量, 则负脉冲两模态输入整形器NZV-NZV为
 4
4
负脉冲多模态输入整形器能明显提高系统响应速度, 其类型包括NZV-NZV、NZVD-NZVD、NEI-NEI[8]。当多模态系统中各阶的振动幅度和共振频带宽度差异明显时, 一般控制策略抑制振动的能力明显降低, 混合多模态输入整形控制策略能解决该问题, 这种控制策略是针对各个模态的振动特性分别建立不同类型的正脉冲单模态输入整形器, 然后将这些整形器卷积而成, 其类型包括ZV-ZVD、ZVD-ZV、EI-ZV、ZV-EI、ZVD-EI和EI-ZVD[7]。
2.3 负脉冲混合多模态输入整形
当多模态系统振动的频率带宽度和振幅差异很大时, 普通负脉冲多模态输入整形器的抑振能力下降; 此外, 正脉冲多模态混合输入整形器的系统响应较慢。因此, 应建立一种新输入整形控制策略来克服这些缺陷。针对多模态系统各阶振动频带的宽度和振动幅值, 建立不同类型的负脉冲单模输入整形器抑制对应模态的振动, 然后将这它们卷积, 从而构成负脉冲混合多模态输入整形器[12]。例如, 一个两模态系统, 其前2阶的负脉冲单模态输入整形器NZV1, NZVD2如下
 5
5
式中, ANZV1m, tNZV1m, ANZVD2n, tNZVD2n分别代表前2阶负脉冲单模态输入整形器脉冲的幅值和作用时间, m和n分别代表 2个输入整形器的脉冲数量, 则这种负脉冲混合两模态输入整形器(NHTIS)为
 6
6
根据该方法可构建6个NHTIS输入整形器:NZV-NZVD、NZV-NEI、NZVD-NZV、NZVD-NEI、NEI-NZV、NEI-NZVD。请注意, 在构建NHTIS过程中, 忽略了连接杆之间的相互作用、非线性和外界激励等因素对抑制残余振动的影响。
3 仿真与分析
已知3-DOF并联机器人的振动参数, Q值设定为1, 在系统中采用单位阶跃输入信号, 限制所有包含NEI的多模态输入整形器的振动幅值不超过5%。为提高系统响应速度使输入整形器的长度最小, 则NZV-NZVD, NZVD-NZV, NZV-NEI和NEI-NZV最少脉冲序列为15, 而NZVD-NEI和NEI-NZVD最少脉冲序列为25。3-DOF并联机器人的NHTIS的参数如表 3和表 4所示。
根据仿真, 图 2给出了无输入整形和有NZV-NZVD作用时3-DOF机器人的振动响应曲线。
如图 2所示, 在没有输入整形器作用时, 前2阶的残余振动较大, 而当使用NZV-NZVD输入整形器后, 前2阶的残余振动明显减小。其他负脉冲混合多模态输入整形器的振动响应曲线如图 3~8所示, 并与普通的负脉冲多模态输入整形器和正脉冲混合输入整形器的振动响应曲线对比。
由图 3~8可得, NHTIS能明显减小3-DOF并联机器人前2个模态的残余振动, 且通过与正脉冲混合两模态输入整形器(PHTIS)对比, NHTIS的响应速度更快。各种类型输入整形器的响应时间及节省时间的百分比如表 5所示。
从表 5可得, NHTIS能明显提高系统响应时间。NZV-NZVD、NZV-NEI、NZVD-NZV、NZVD-NEI、NEI-NZV、NEI-NZVD比ZV-ZVD、ZV-EI、ZVD-ZV、ZVD-EI、EI-ZV、EI-ZVD分别节省了0.004 1, 0.003 9, 0.005 1, 0.004 3, 0.005 2, 0.004 7 s。在这些NHTIS中, NZV-NZVD系统响应时间最快, 节省时间比例最高, 达到了39.04%, 而NZVD-NEI的响应时间最慢, 节省时间比例最低, 但仍比ZVD-EI的响应快, 节省时间比例为24.29%。
NHTIS能明显减小残余振动, 而PHTIS的响应曲线比NHTIS的响应曲线更平滑, 这代表PHTIS可以抑制更多的残余振动, 但PHTIS响应时间较慢。随着时间增加, NHTIS和PHTIS在系统响应时间之后所剩残余振动的幅值差将越来越小。对于3-DOF机器人, NHTIS已能显著抑制机器人的残余振动, 但如何减少系统响应时间是更为重要的指标, 而NHTIS能有效节省响应时间。而NHTIS与普通两模态负脉冲输入整形器相比, 在系统响应时间之后, 有些类型的NHTIS抑制残余振动幅值的能力要强于普通两模态负脉冲输入整形器, 例如NZVD-NZV好于NZVD-NZVD(见图 4), NEI-NZV好于NEI-NEI(见图 5), NEI-NZVD好于NEI-NEI(见图 8), 而其他类型NHTIS抑制振动幅度的能力要低于普通两模态负脉冲输入整形器, 但对于所有类型的NHTIS, 其响应时间都快于普通两模态负脉冲输入整形器。
此外, 负脉冲两模态输入整形器和NHTIS在抑振过程中会产生一些比较明显的振荡, 但这些振荡远小于无输入整形器作用时系统的残余振动, 这是由输入整形器中的脉冲影响的, 振荡的数量与脉冲的数量有关, 脉冲的数量越多, 振荡的次数就越多。对于NHTIS, 在减振过程中, NZVD-NZV产生的振荡幅度最大, 而NZV-NZVD产生的振荡幅度最小; 当所有脉冲作用结束后, NZV-NZVD可抑制最多的残余振动, 且在最短的时间能内消除所有的残余振动, 而NZVD-NEI抑制残余振动最少, 且消除全部残余振动所需的时间最长。
另外,负脉冲两模态输入整形器的响应时间与NHTIS几乎相同,但抑制振动幅值的能力却不相同。多模态的输入整形器抑制振动幅值的能力是由每个振动模态对应的频带宽度和振幅决定的。例如,3-DOF并联机器人前2个模态的负脉冲单模态输入整形器NZV1、NZV2、NEI1、NEI2,可构成两模态的输入整形器NZV-NZV、NEI-NEI、NZV-NEI和NEI-NZV,这些整形器的响应时间比较接近,但抑制振动幅值的能力是不同的,减少振动幅值从高到低依次为NZV-NZV、NEI-NZV、NZV-NEI、NEI-NEI。同样的结果也适用于其他类型的多模态输入整形器和混合多模态输入整形器。
NZV-NZVD、NZVD-NZV、NZV-NEI和NEI-NZV输入整形器的参数
NZVD-NEI和NEI-NZVD输入整形器参数
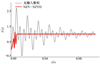 |
图2 有NZV-NZVD和无输入整形时的振动响应 |
 |
图3 ZV-ZVD、NZV-NZV和NZV-NZVD整形的振动响应 |
 |
图4 ZVD-ZV、NZVD-NZVD和NZVD-NZ整形的振动响应 |
 |
图5 EI-ZV、NEI-NEI和NEI-NZV整形的振动响应 |
 |
图6 ZV-EI、NZV-NZV和NZV-NEI整形的振动响应 |
 |
图7 ZVD-EI、NZVD-NZVD和NZVD-NEI整形的振动响应 |
 |
图8 EI-ZVD、NEI-NEI和NEI-NZVD整形的振动响应 |
输入整形器的响应时间
4 结论
介绍了一种新型混和控制策略的减振原理,并结合一种3-DOF并联机器人构建了6个NHTIS输入整形器:NZV-NZVD、NZV-NEI、NZVD-NZV、NZVD-NEI、NEI-NZV和NEI-NZVD。使用仿真的方法分析了这些输入整形器的抑振性能,并与正脉冲混合两模态、负脉冲两模态输入整形器的抑振性能对比。根据仿真结果可得,NHTIS能明显减少3-DOF并联机器人前2阶模态的残余振动,但在抑制振动过程中产生了一些比较明显的振荡,这是由输入整形器的脉冲影响的,脉冲越多振荡次数越多。此外,根据各种NHTIS的振动响应曲线获得了响应时间和抑制振动幅值的能力,NHTIS的响应时间明显快于PHTIS。负脉冲混合输入整形器NZV-NZVD比正脉冲混合输入整形器ZV-ZVD节省了39.04%的响应时间。且NZV-NZVD在NHTIS中响应时间最快,达到了0.006 4 s;而NZVD-NEI的响应速度最慢,为0.013 4 s,但仍比ZVD-EI快了0.004 3 s,节省了24.29%的响应时间。因此可得,NHTIS能在更快的响应速度下有效减少多模态系统的残余振动。
References
- KapucuS, NihatY, YavuzH. Suppression of Residual Vibration of a Translating-Swinging Load by a Flexible Manipulator[J]. Mechatronics, 2008, (18): 121-128 [Article] [CrossRef] [Google Scholar]
- YuChunli, NiuWangqiang. Research on Anti Sway of Wharf Handling Crane Based on Input Shaping Method[J]. Computer Simulation, 2016, 33(11): 233-238 [Article] [Google Scholar]
- JiaP X, LiE, LiangZ Z, et al. Adaptive PD Control Combined with Input Shaping for Suppressing Vibration of a Single-Mode Flexible Mechanism[J]. Journal of Vibration and Shock, 2013, 32(17): 189-193 [Article] [Google Scholar]
- MohammedF D, ZiyadN M, Nonlinear Input-Shaping Controller for Quay-Side Container Cranes[J]. Nonlinear Dynamics, 2006, (45): 149-170 [Article] [Google Scholar]
- Li B, Zhang X P, Mills J K, et al. Vibration Suppression of a 3-PRR Flexible Parallel Manipulator Using Input Shaping[C]//IEEE International Conference on Mechatronics and Automation, Changchun, China, 2009: 3539-3544 [Article] [Google Scholar]
- MasoudZ, AlhazzaK. Frequency-Modulation Input Shaping for Multimode Systems[J]. Journal of Vibration and Control, 2016, 22(15): 3439-3451 [Article] [CrossRef] [Google Scholar]
- Li B, Wei Y L, Zhu S X, et al. Hybrid Multi-Mode Input Shaping Suppresses the Vibration of a 3-DOF Parallel Manipulator[C]//International Conference on Advanced Engineering Materials and Technology, Sanya, China, 2011: 2115-2118 [Article] [Google Scholar]
- Huang Q, Zhang D, Li B, et al. Vibration Suppression of Manipulator with Multiple-Mode Negative[C]//20122nd International Symposium on Chemical Engineering and Material Properties, Taiyuan, China, 2012: 816-820 [Article] [Google Scholar]
- BaumgartM D, PaoL Y. Discrete Time-Optimal Command Shaping[J]. Journal of Automatica, 2007, 43: 1403-1409 [Article] [CrossRef] [Google Scholar]
- ZhangX P, MillsJ K, CleghornW L. Dynamic Modelling and Experimental Validation of a 3-PRR Parallel Manipulator with Flexible Intermediate Links[J]. Journal of Intelligent and Robotic System, 2007, 50(4): 323-340 [Article] [CrossRef] [Google Scholar]
- SinghoseW E, SeeringW P, SingerN C. Time-Optimal Negative Input Shapers[J]. Journal of Dynamic, Measurement, and Control, 1997, 119(2): 198-205 [Article] [CrossRef] [Google Scholar]
- Han Y Y, Li B, Wei Y L, et al. Vibration Suppression of a 3-DOF Parallel Manipulator Based on Hybrid Negative Impulses Multi-Mode Input Shaping[C]//2011 International Conference on Mechatronics and Information Technology, Shenyang, China, 2012: 372-377 [Google Scholar]
All Tables
All Figures
|
图1 3-DOF并联机器人 |
| In the text | |
|
图2 有NZV-NZVD和无输入整形时的振动响应 |
| In the text | |
|
图3 ZV-ZVD、NZV-NZV和NZV-NZVD整形的振动响应 |
| In the text | |
|
图4 ZVD-ZV、NZVD-NZVD和NZVD-NZ整形的振动响应 |
| In the text | |
|
图5 EI-ZV、NEI-NEI和NEI-NZV整形的振动响应 |
| In the text | |
|
图6 ZV-EI、NZV-NZV和NZV-NEI整形的振动响应 |
| In the text | |
|
图7 ZVD-EI、NZVD-NZVD和NZVD-NEI整形的振动响应 |
| In the text | |
|
图8 EI-ZVD、NEI-NEI和NEI-NZVD整形的振动响应 |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.